

1.13. Исследование динамики сау с учетом нелинейности
В этом разделе исследуется скорректированная САУ с учетом нелинейности.
Установим возможность возникновения в системе автоколебаний. Нелинейная САУ считается удовлетворительной, если автоколебания отсутствуют.
Условия возникновения автоколебаний в нелинейных системах (уравнение гармонического баланса)
![]() (1.13.1)
(1.13.1)
В данном курсовом проекте рассматривается нелинейный элемент, который имеет однозначную характеристику, представленную на рисунке 1.13.1
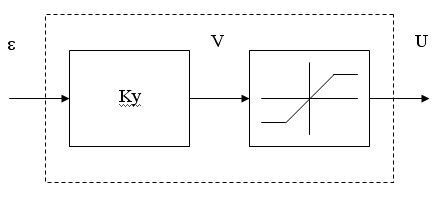
Рис 1.13.1 - Нелинейность типа “усилитель с насыщением”
Для выявления автоколебаний воспользуемся критерием, базирующимся на логарифмических частотных характеристиках. Т.к. данный критерий использует ЛАЧХ и ЛФЧХ скорректированной системы, которые мы уже построили в предыдущих пунктах.
Согласно критерию, условия возникновения автоколебаний имеют вид:
![]() (1.13.2)
(1.13.2)
![]() (1.13.3)
(1.13.3)
![]() (1.13.4)
(1.13.4)
Где ![]() (1.13.5)
(1.13.5)
Для
определения возможности существования
автоколебаний необходимо построить
логарифмическую амплитудную
![]() и фазовую
и фазовую![]() частотные характеристики линейной
части системы и логарифмическую
амплитудную характеристику
частотные характеристики линейной
части системы и логарифмическую
амплитудную характеристику![]() гармонически линеаризованного нелинейного
элемента с общим масштабом для
гармонически линеаризованного нелинейного
элемента с общим масштабом для![]() и
и![]() .
Далее если для какой-либо из ординат
ЛАЧХ
.
Далее если для какой-либо из ординат
ЛАЧХ![]() линейной части системы, взятых при
значениях
линейной части системы, взятых при
значениях![]() ,
при которых ЛФЧХ
,
при которых ЛФЧХ![]() пересекается с прямыми
пересекается с прямыми![]() ,
можно найти равную ей ординату ЛАХ
,
можно найти равную ей ординату ЛАХ![]() нелинейного элемента, то значит на этой
частоте в системе будут возникать
автоколебания. (см. рис. 1.13.2)
нелинейного элемента, то значит на этой
частоте в системе будут возникать
автоколебания. (см. рис. 1.13.2)
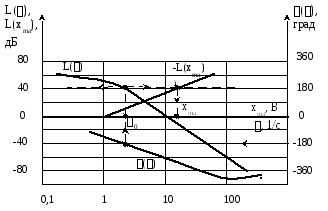
Рис 1.13.2 – графическое определение наличия автоколебаний, и их параметров.
Если же таких частот нет, то значит автоколебания в системе отсутствуют.
Ниже приведена таблица значений q(x) для нашего нелинейного элемента. При условии:
![]()
Таблица 1.13.1. – расчетные значения q(x)
|
X |
2,5 |
3 |
5 |
7 |
10 |
12 |
13 |
14,3 |
15 |
16 |
17 |
18 |
19 |
20 |
|
lgx |
0,40 |
0,48 |
0,70 |
0,85 |
1,00 |
1,08 |
1,11 |
1,16 |
1,18 |
1,20 |
1,23 |
1,26 |
1,28 |
1,30 |
|
q(x) |
1,00 |
0,92 |
0,61 |
0,44 |
0,31 |
0,26 |
0,24 |
0,22 |
0,21 |
0,20 |
0,19 |
0,18 |
0,17 |
0,16 |
|
-lgq(x) |
0,0 |
0,7 |
4,3 |
7,0 |
10,0 |
11,6 |
12,3 |
13,1 |
13,5 |
14,1 |
14,6 |
15,1 |
15,5 |
16,0 |
|
X |
21 |
22 |
23 |
24 |
25 |
26 |
27 |
30 |
60 |
100 |
150 |
200 |
|
lgx |
1,32 |
1,34 |
1,36 |
1,38 |
1,40 |
1,41 |
1,43 |
1,48 |
1,78 |
2,00 |
2,18 |
2,30 |
|
q(x) |
0,15 |
0,14 |
0,14 |
0,13 |
0,13 |
0,12 |
0,12 |
0,11 |
0,05 |
0,03 |
0,02 |
0,02 |
|
-lgq(x) |
16,4 |
16,8 |
17,2 |
17,6 |
17,9 |
18,3 |
18,6 |
19,5 |
25,5 |
29,9 |
33,5 |
36,0 |
График зависимости –L(xma) представлен в графической части.
В нашей системе существует всего-лишь одна точка пересечения φ(w) с прямой –π на частоте 55 Гц. Прямая, параллельная оси lgw, проходящая, через соответствующую частоте 55 Гц точку на ЛАЧХ скорректированной системыне пересекает q(xma), что говорит об отсутствии автоколебаний в системе.
Т.к. автоколебания отсутствуют, то нашу САУ можно считать удовлетворительной.