

1.6 Определение лачх последовательного корректирующего устройства по лачх исходной системы и желаемой лачх
Определить ЛАЧХ корректирующего устройства можно простым вычитанием ЛАЧХ исходной системы из ЛАЧХ желаемой.
Т.к. ЛАЧХ представляют собой отрезки прямых, то для определения ЛАЧХ корректирующего устройства достаточно найти наклоны ЛАЧХ между точками сопряжения.
Расчёт сведён в таблицу, приведенную ниже.
Таблица 1.6.1. – наклон ЛАЧХ корректирующего устройства.
|
|
0 - ωc1 |
ωc1 - ωc2 |
ωc2 - ωc3 |
ωc3 - ωc4 |
ωc4 - ∞ |
|
Исходная |
-20 |
-40 |
-60 |
-80 |
-80 |
|
Желаемая |
-20 |
-80 |
-20 |
-20 |
-80 |
|
Корректир. устройство |
0 |
-40 |
+40 |
+60 |
0 |
График ЛАЧХ корректирующего устройства приведен в графической части.
1.7. Определение параметров передаточной функции корректирующего устройства по параметрам ее лачх
По графикам желаемой ЛАЧХ и ЛАЧХ корректирующего устройства мы можем восстановить их передаточные функции, представив их в виде последовательного включения трёх типовых звеньев с различными параметрами, представленных в таблице.
Таблица 1.7.1. – типовые звенья, их ЛАЧХ и передаточные ф-ции.
|
Название |
АЧХ |
Передат. ф-ция |
Параметры |
|
Интегрирующее (И) |
|
|
k |
|
Апериодическое (А) |
|
|
k, T |
|
Форсирующее (Ф) |
|
|
k, T |



Тогда мы получим вот такой состав типовых звеньев для желаемой ЛАЧХ:
И (k=240) → А х3 (k=1; T=0.95) → Ф х3 (k=1; T=0.4) → А х3 (k=1; T=0.01)
Для корректирующего устройства:
A х2 (k=1; T=0.95)→ Ф х4 (k=1; T=0.4)→ Ф (k=1; T=0.07) → А х3 (k=1; T=0.01)
Запишем передаточные функции как произведение передаточных функций типовых звеньев, входящих в цепь:
Для желаемой ЛАЧХ:
![]() (1.7.1)
(1.7.1)
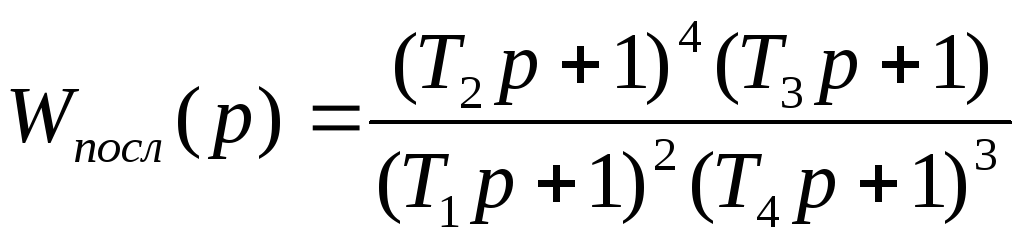
Для корректирующего устройства:
![]() (1.7.2)
(1.7.2)
Исходя из того, что в (1.7.2) степень числителя равно степени знаменателя, можно говорить о физической реализуемости корректирующего устройства.
1.8 Определение передаточных функций различных типов корректирующих устройств
В пункте 1.7. мы нашли передаточную функцию последовательного корректирующего устройства. Опираясь на неё, теперь мы можем найти передаточные функции параллельного и прямого параллельного устройств.
Параллельное корректирующее устройство:
![]() ;
;
где
 - последовательное корр. устройство
- последовательное корр. устройство
![]() -
передаточная функция звена W2
исходной сист.
-
передаточная функция звена W2
исходной сист.
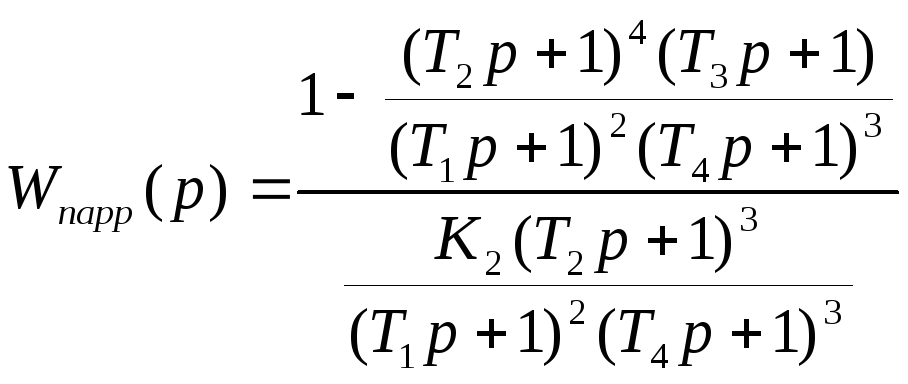 ;
;
 (1.8.1)
(1.8.1)
Прямое параллельное корректирующее устройство
![]() ;
;
 ;
;
 ;
;
 (1.8.2)
(1.8.2)
Полученные выражения для параллельного и прямого параллельного корректирующих устройств, вышли громоздкими и объёмными. Поэтому для коррекции исходной системы мы воспользуемся последовательн. устройством.
1.9. Построение переходного процесса с использованием пэвм и оценка качества регулирования в скорректированной сау
Перед тем как внедрять только что спроектированное корректирующее устройство в производство, необходимо убедиться в том, что оно способно обеспечить необходимые показатели качества системы. Для этого применяют моделирование или симуляцию при помощи ПЭВМ.
Для симуляции работы нашего корректирующего устройства мы воспользуемся пакетом Simulink программы MatLab.
Для оценки качества переходного процесса была создана модель желаемой системы в Simulink, которая моделирует переходный процесс в системе.
Внешний вид модели и полученный с её помощью переходный процесс приведены в графической части.
По полученной переходной функции определим показатели качества:
Перерегулирование
 =30%
=30%Время переходного процесса при δ=5% tp=0,4с
Напомним,
что нам необходимо было поулчить
![]() <35%
иtp<1,5с
<35%
иtp<1,5с
Отсюда можно сделать вывод, что применение спроектированного корректирующего устройства должно обеспечить необходимые показатели качества.