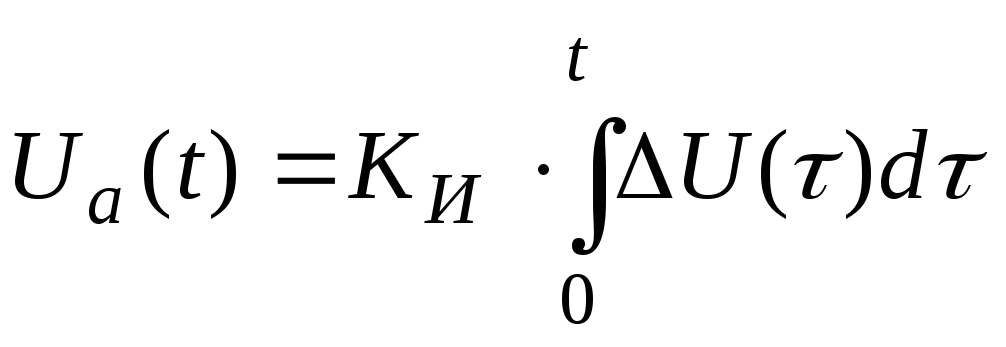
1. «И» закон регулирования.
Для момента времени t2:
Допустим, что
![]() - возрастает.
- возрастает.
Единственная точка стабилизации:
Для «И»:
![]()
Определение:Астатической называется система, у которой выходнаявеличина не зависит от возмущения (статическая ошибка равна нулю).
![]()

![]()



МС

![]()
![]()
2. Пропорциональный закон регулирования.
![]()
Предположим, что
![]() ошибка:
ошибка:![]()
![]()
![]() ,
наше предположение не верно, т.е
,
наше предположение не верно, т.е
![]()

![]()



![]()
![]()

МС
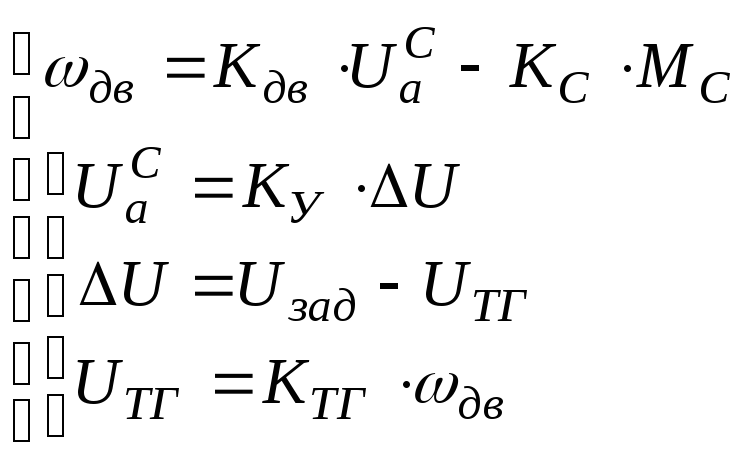
Определение:Статической называется система автоматического регулирования (САР), у которой выходная величина уменьшается при увеличении возмущения. Статическая ошибка в такой системе на равна нулю.
Статические характеристики статической САР.
Определение:Статические характеристики - характеристики, полученные в положении равновесия.
Статические характеристики двигателя постоянного тока.
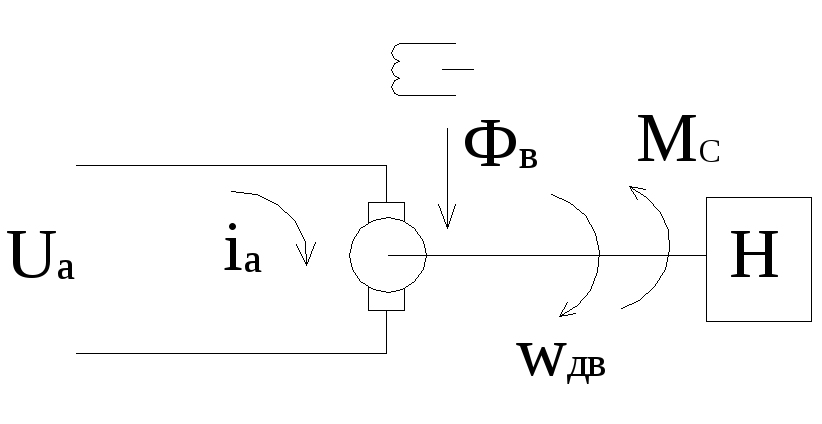
Ua– напряжение на якорной обмотке двигателя.
Ia– ток в якорной цепи.
ФВ– ЭМ. поток возбуждения.
![]() - скорость вращения
двигателя.
- скорость вращения
двигателя.
МС– момент сопротивления на валу.
При взаимодействии тока iaи потока ФВна валу возникает момент вращения двигателя МДВ.
![]()
![]()
ФВ= const, если
реакцией якоря можно пренебречь, то
![]()
1) Если МС=
0, то![]()




Насыщение
системы

Ua
2) Ua– const.
![]()
Ua2
Если
Ua= 0

![]()

Ua1


MC
Ua=0



Статическая
характеристика двигателя постоянного
тока:
![]()
{по поводу степени «с» в лекциях написано, что она статическая и формируется системой}
![]()
![]()
![]()
![]()
К

К – коэффициент усиления разомкнутой системы.
![]()
![]()
(**)
Уравнения статики статической системы.
Найдем статическую ошибку.
![]()
![]()
Статическая ошибка статической системы
Индексы: у - по управляющему воздействию, В – по возмущающему воздействию.
Что дает отрицательная обратная связь (замыкание системы)?
Момент изменяется
от 0 до МС
![]() - разомкнутая система,
- разомкнутая система,
![]() - изменение скорости двигателя.
- изменение скорости двигателя.
Для замкнутых систем скорость изменилась:
![]()
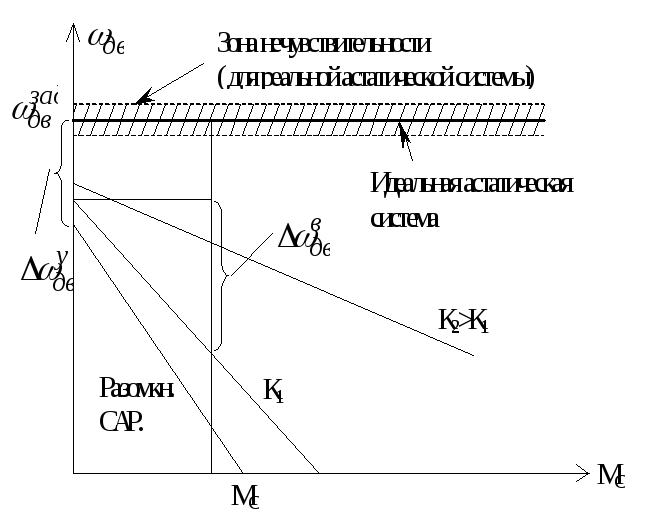
Вывод:При замыкании системы статическая ошибка по возмущению уменьшается в (1+К) раз.
Построим статические характеристики по выражению (**).
6. Линеаризация. Вывод уравнений генератора постоянного тока с рабочей точкой в нелинейной зоне.
Л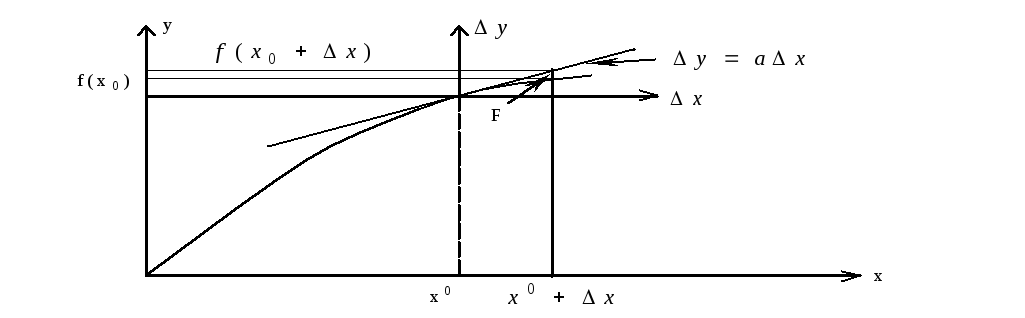 инеаризация
– замена нелинейных уравнений на
линейные, проводится в пределах заданной
точности и используется для исследования
линейных систем.
инеаризация
– замена нелинейных уравнений на
линейные, проводится в пределах заданной
точности и используется для исследования
линейных систем.
Рассмотрим точку х0вблизи которой мы хотим получить наше уравнение.
Зададим приращение
![]()
Разложение в ряд Тейлора.


F
Отбрасываем члены F.
Получаем линеаризованное ур-е.

![]()
Линеаризованное ур-е в приращениях:
Переносим начало координат из точки 0 в точку 0’.
![]()
F – ошибка линеаризации.
Получение линеаризованныхуравнений
генератора постоянного тока на холостом ходу.
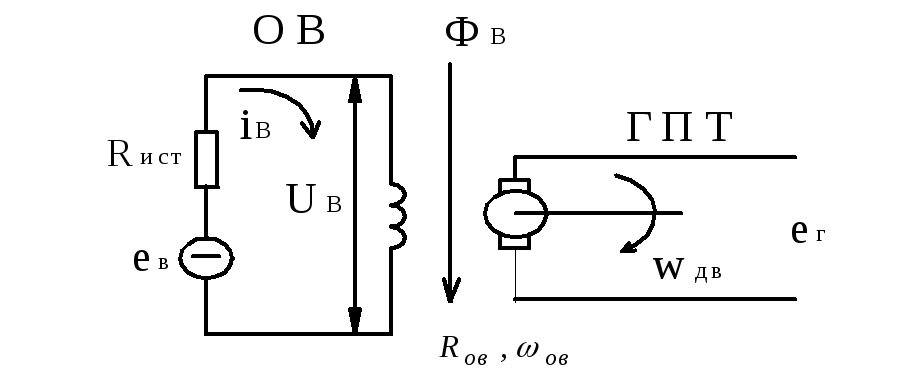
ОВ – обмотка возбуждения.
ГПТ – генератор постоянного тока.
RИСТ– активное сопротивление источника питания.
еВ– ЭДС источника питания (возбуждения).
iB, UB– ток и напряжение на обмотке возбуждения.
ФВ– ЭМ поток, создаваемый обмоткой возбуждения.
![]() - скорость, с которой
посторонний двигатель вращает якорь
генератора постоянного тока.
- скорость, с которой
посторонний двигатель вращает якорь
генератора постоянного тока.
ег– ЭДС генератора.
RОВ– активное сопротивление обмотки возбуждения
![]() - числовитков
обмотки возбуждения.
- числовитков
обмотки возбуждения.
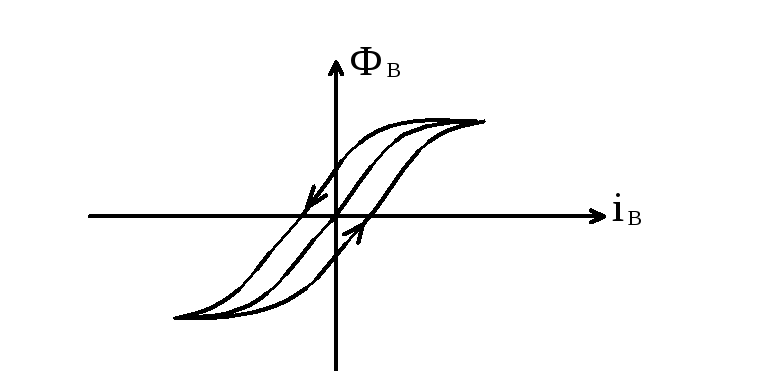
Уравнение обмотки возбуждения.
ОВ: 1)![]()

2
ЭДС
самоиндукции
 )
)![]()
3) ГПТ – цепь генератора
![]()
СГ– некоторая константа (можно, конечно, вспомнить из машин, но лень).
Уравнения 1-3 это описание ГПТ в виде нелинейных диф. уравнений.
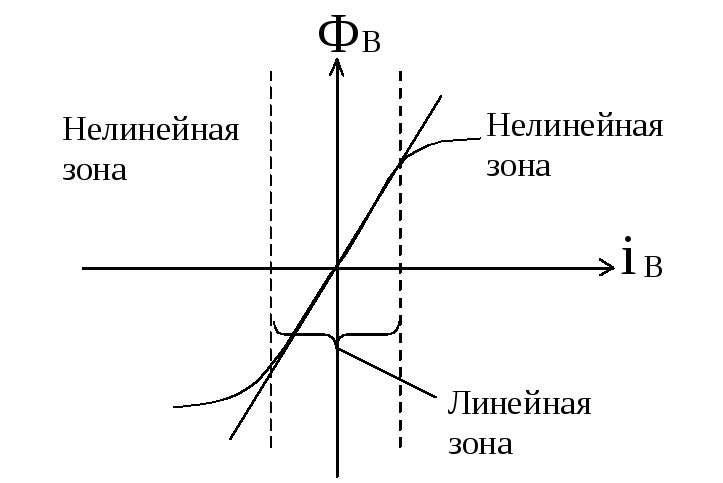
1) Если шириной петли гистерезиса пренебречь нельзя, то линеаризация невозможна, и для описания требуется привлечение аппарата анализа нелинейных систем.
2) Если ширина петли гистерезиса мала, то 2-ух значная характеристика заменяется на 1-но значную (средняя линия петли гистерезиса).
Рассмотрим 2 участка.