

56 . Нелинейные сау . Типовые н . Э .
Естественные Н. Э. -ограничены « энергетически ». , гистерезис , плохое исполнение .
Искусственные Н. Э. - вводятся искусственно в систему , чтобы обеспечить качественно новые процессы в системе .

Далее рассматриваются нелинейные системы , состоящие из нелинейного статического элемента и линейной динамической системы .
57 . Структурные схемы нелинейных сау . Некоторые правила их преобразования .
Линия передачи -1
Узел -2

Линейное динамическое звено -3
Нелинейный статический элемент -4

Три вида описания Н . Э .
1) графический
2) аналитическийf(x)=arctg(x)
3) кусочно-линейная аппроксимация
B;x>=a
f(x)= - B ; x<=a
0 ; модуль(х)<a
Соединение нелинейных статических элементов .



Особенности Н . САУ .
Принцип суперпозиции не выполняется

y=y1+y2 , для линейных систем (принцип выполняется ) ;y<>y1+y2 для нелинейных САУ .
1) в линейной части системы можно производить любые структурные преобразования .
2) нельзя переставлять Н . Э . между собой
3) нельзя переставлять линейные и Н . Э .
4) нелинейные статические элементы можно переносить через узел ветвления .
При переносе статического нелинейного элемента через узел по (против) направления передачи сигнала в отходящую от узла ветвь следует добавить нелинейный элемент с прямой (обратной ) характеристикой.

58 . Основные понятия фазовой плоскости , свойства фазовых траекторий . Примеры .
Исследование динамики Н . С . на фазовой плоскости .

nгопорядка .

![]() ;
;
![]() -начальные
условия .
-начальные
условия .
![]() -вектор
(решение системы ) ,
-вектор
(решение системы ) ,
![]() -вектор
состояния системы .
-вектор
состояния системы .
при изменении tвектор описывает траекторию вn-мерном пространстве , называемым фазовым. Дляn<=2 используют графический метод (метод фазовой плоскости ) .
n=2(плоскость ) .
![]()
![]()
![]()
![]()
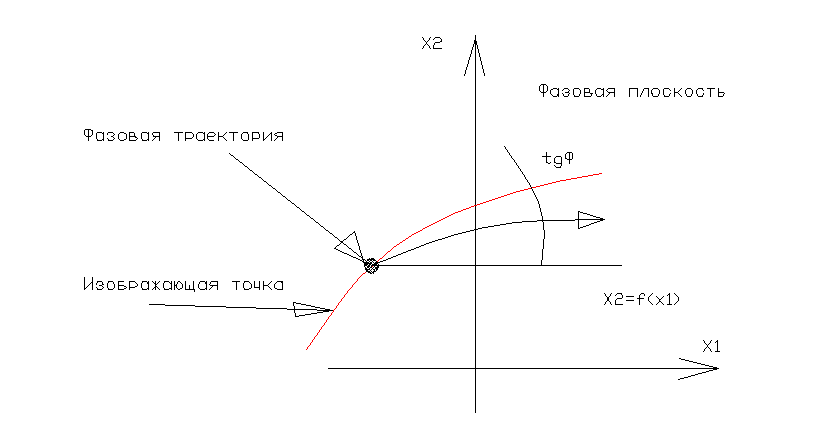
x2=f(x1)-изображающая точка , значение уравнения в точке .
При разных начальных значениях получается совокупность фазовых траекторий (фазовый портрет ) .
Свойства фазовых траекторий :
1) При однозначныхf1(x1,x2) иf2(x1,x2)
 -
однозначная , для каждой точкиx1
,x2
-
однозначная , для каждой точкиx1
,x2
 определено однозначно . Фазовые
траектории не пересекаются , за
исключением точек , называемых особыми
.
определено однозначно . Фазовые
траектории не пересекаются , за
исключением точек , называемых особыми
.2) Фазовые траектории заканчиваются в точках , соответствующих положениям равновесия .
![]() ,
,
![]() (нет движения ) .
(нет движения ) .
![]()
![]() особые
точки .
особые
точки .
Нелинейная система
второго порядка использует в качестве
первой координаты сигнал отклонения
(ошибки ) , а второй координаты - производную
![]() ,
,![]() ,
,
![]() .
.

![]()
3) Движение изображающий точки происходит слева направо (в верхней полуплоскости ) , а в нижней - справа налево . Изображающая точка движется по часовой стрелке .

4) Пересечение фазовыми траекториями оси абсцисс происходит под прямым углом .
![]() ,
,
![]() ,
,
![]() на оси абсцисс х принимает максимальные
и минимальные значения .
на оси абсцисс х принимает максимальные
и минимальные значения .
59 . Метод изоклин . Исследование н . Систем 2-го порядка на фазовой плоскости , типы особых точек .
Метод изоклин .
![]()
ненулевые Н . У .
![]() ;
;
![]() ;
;
![]() - уравнение фазовых траекторий .
- уравнение фазовых траекторий .
![]() -характеристическое
уравнение системы .
-характеристическое
уравнение системы .
![]() ;
;
![]() ;
;
![]()
1)
 ;
;
 ;
;
 ;
;
 ;
;
 ;a-tgугла наклона касательной к фазовой
траектории .
;a-tgугла наклона касательной к фазовой
траектории .
![]() ;
;
![]() - уравнение прямых с заданным наклоном
касательных к фазовой траектории =a(изоклины ) .
- уравнение прямых с заданным наклоном
касательных к фазовой траектории =a(изоклины ) .
Изоклина -линия для которой наклон касательных к фазовой траектории постоянен .
|
a= 0 ,x= 0 a=¥,v= 0 a= 1 ,x= -v a= - 1 , v = x
|
|

2)
 ;
;
![]() ; корни комплексно
сопряженные .
; корни комплексно
сопряженные .
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
|
a= 0 ,v= -x a= - 2 ,x=v a= -1 , x = 0
|
|
