

§ 3-5. Связь между различными динамическими характеристиками
Как уже указывалось выше, все рассмотренные динамические характеристики являются полными, и применение любой из них в каждом конкретном случае является исключительно делом вкуса или удобства. Каждая из характеристик может быть однозначно найдена, если известна любая другая характеристика (рис. 3-6). Рассмотрим этот вопрос подробнее.
Стационарная линейная система или элемент системы с сосредоточенными параметрами описывается обыкновенным дифференциальным уравнением с постоянными коэффициентами
![]() (3-26)
(3-26)
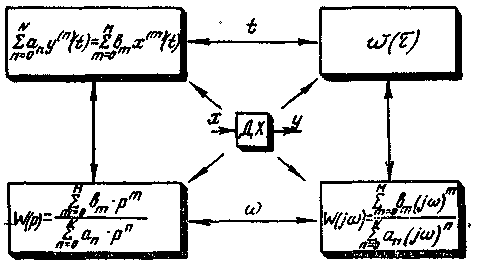
Рис. 3-6. Взаимосвязь динамических характеристик
(сравни с (3-13)). Импульсная характеристика w(t)(или переходная функция вh(t)) может быть найдена как решение этого уравнения для нулевых начальных условий при подстановкех(t)=δ(t)(илих(t)=1(t) дляh(t)). Для определения передаточной функции по (3-26) воспользуемся теоремой о дифференцировании оригинала при нулевых начальных условиях (см. табл. 3-1, п. 5). Получаем аналог (3-26)
![]() , (3-27)
, (3-27)
откуда, вынося Y(р)иХ(р) за знак суммы, получаем в соответствии с определением (3-22)
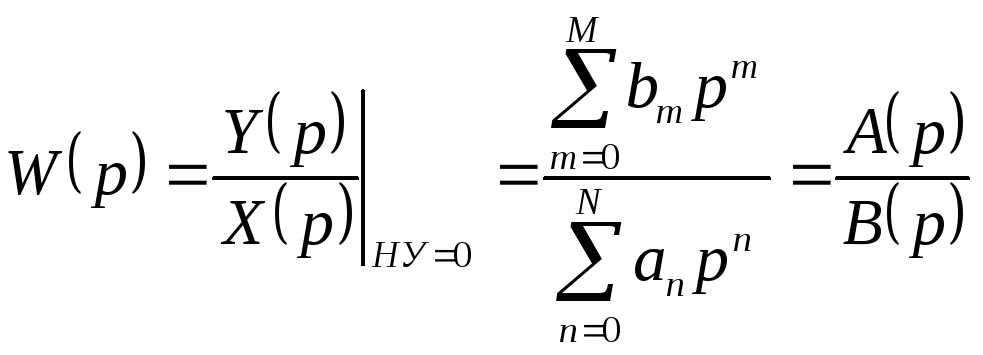 . (3-28)
. (3-28)
Таким образом, передаточная функция линейных систем с сосредоточенными параметрами всегда является дробно-рациональной функцией. Из связи преобразований Лапласа и Фурье получаем
![]() . (3-29)
. (3-29)
Таким образом,
переход от характеристик во временной
области (3-26) к характеристикам в частотной
области (3-29) не представляет труда. Для
обратного перехода, например, от
передаточной функции (3-28) к дифференциальному
уравнению (3-26) следует лишь произвести
подстановку в (3-27)
![]() (оператор дифференцирования) .
(оператор дифференцирования) .
Импульсная
характеристика может быть найдена из
передаточной функции как обратное
преобразование Лапласа
![]()
![]() , (3-30)
, (3-30)
где с — абсцисса абсолютной сходимости.
На практике вместо преобразования (3-30) пользуются для дробно-рациональных функций типа (3-28) теоремой разложения Хевисайда (эта теорема для случая простых корней дана в табл. 3-1, п. 9)
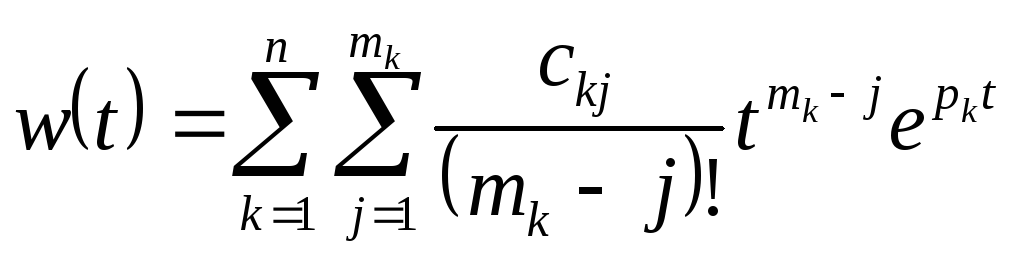 , (3-31,а)
, (3-31,а)
где pk— корни алгебраического уравненияА(р)=0;
п— числоразных корней уравненияА(р)=0;
тk
— кратность корняpk(очевидно, что![]() )
)
ckj- — коэффициент, находимый как
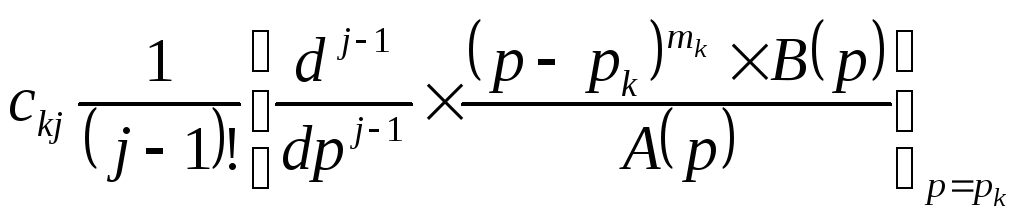 . (3-31б)
. (3-31б)
Пример 3-4. Рассмотрим дифференциальное уравнение двигателя (3-10) приМс=0. Передаточная функция, как следует из (3-28), равна
![]() .
.
Корни уравнения
А(р)=0 простые и равныр1=0,![]() .
По теореме разложения (удобнее в форме
п. 9 табл. 3-1) находим
.
По теореме разложения (удобнее в форме
п. 9 табл. 3-1) находим
![]()
Глава 4 структурный метод анализа сар
Составление дифференциальных уравнений даже простых динамических систем — сложная задача. Подобно тому как любая конструкция состоит из нескольких более простых элементов, так и всякая САР может быть представлена состоящей из ряда простейших связанных друг с другом элементов — звеньев системы автоматического регулирования. Надо заметить, что при изображении САР применяют два типа схем — функциональные и структурные. Обычно после составления функциональной схемы переходят с целью анализа САР к ее структурной схеме, которая позволяет выявить основные свойства САР, провести анализ устойчивости и качества процессов регулирования, а при необходимости — и провести коррекцию системы.