

§ 2-1. Резисторные датчики
Резисторные датчики работают в цепях постоянного и переменного тока и делятся на:
1) потенциометрические (реостатные), служащие в основном для измерения перемещений;
2) угольные — для измерения перемещений и давлений;
3) тензометрические — для измерения деформаций и вибраций твердых тел;
4) термосопротивления — для измерения температуры, скорости потока газа, разреженности газа и т. п.
В потенциометрических датчиках, которые могут быть двух типов — однотактные (рис. 2-2,а) и двухтактные(рис. 2-2,б), измеряемое перемещение

Рис. 2-2. Потенциометрические датчики и их характеристики
преобразуется в перемещение движка потенциометра, выходное напряжение которого характеризует измеряемую величину. В автоматике применяют линейные потенциометры, с линейной зависимостью выходного напряжения от перемещения, ипрофилированные, с нелинейной зависимостью, что необходимо в некоторых случаях (коррекция нелинейности тракта измерения и др.).
При работе датчика
на конечную нагрузку возникают
нежелательные явления: искажение его
статической характеристики, возрастающее
с уменьшением сопротивления нагрузки,
появление инерционности при реактивной
нагрузке. Простейший способ ликвидации
влияния нагрузки на статическую
характеристику датчика состоит в выборе
![]() ,
гдеRH,
R— соответственно
сопротивление нагрузки и сопротивление
датчика. На практике это обычно достигается
при подаче выходного напряжения датчика
на сетку электронного усилителя.
,
гдеRH,
R— соответственно
сопротивление нагрузки и сопротивление
датчика. На практике это обычно достигается
при подаче выходного напряжения датчика
на сетку электронного усилителя.
Для указанных датчиков применяют проволочные потенциометры, поскольку непроволочные (пленочные и др.) имеют малую точность и надежность. Однако такие датчики имеют ступенчатую статическую характеристику (рис. 2-2,в), обусловленную тем, что при перемещении подвижной контакт последовательно переходит с одного витка на другой. Разрешающая способность датчика в этом случае равна
![]()
где l, w — длина и число витков потенциометра.
При питании датчиков переменным током частота ; питающего напряжения выбирается из условия
![]() , (2-1)
, (2-1)
где ωm— максимальная частота изменения входной переменнойх.
Серийно изготавливаемые однооборотные потенциометрические датчики делятся по конструктивным погрешностям, обусловленными технологией производства, на три класса (табл. 2-1).
Таблица 2-1
|
Класс |
Допустимое отклонение | |
|
по сопротивлению, % |
по линейности, град | |
|
I II III |
±5 ±5 ±10 |
±0,25 ±0,5 ±1 |
Достоинствами потенциометрических датчиков являются малый вес и габариты, простота конструкции, возможность работы в цепях постоянного и переменного тока. Недостатки: низкая надежность из-за трущегося контакта, ограниченная разрешающая способность, влияние нагрузки на характеристики.
Угольные датчики наиболее широко применяются в регуляторах напряжения и тока, в частности в генераторах установленных на железнодорожных вагонах. Их действе основано на изменении контактного сопротивления угольных пластин при изменении давления на них. Угольные датчики конструктивно выполняют в виде столбиков набранных из 10÷15 шайб диаметром 5÷10мм и толщине) 1÷2мм каждая. Угольный столбик заключается в специальную обойму (рис. 2-3,а). Типичный вид статической характеристики такого датчика показан на рис. 2-3,б. На рис. 2-3,впоказана схема регулятора напряжения генератора, которая работает следующим образом.
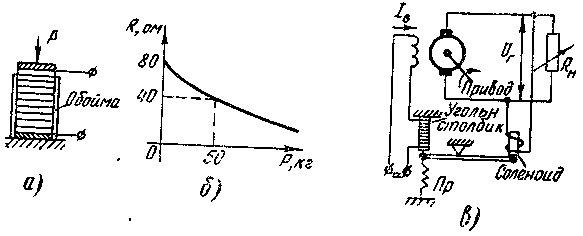
Рис. 2-3. Угольный датчик и схема его включения
Напряжение Uгна шинах генератора изменяется под действием изменений сопротивленияRннагрузки, носящих случайный характер (подключение потребителей электроэнергии). ИзмененияUгвызывают изменение тока соленоида и приводят к перемещению сердечника соленоида, связанного с рычагом. Последний другим своим концом воздействует на угольный столбик, что приводит к регулированию токаIввозбуждения генератора. Схема настраивается первоначально, таким образом, с помощью регулировки пружиныПр, связанной с рычагом, чтобы при номинальной нагрузке напряжениеUгбыло номинальным.
Термосопротивления. Их действие основано на изменении сопротивления проводника или полупроводника при изменении его температуры.
Различают два применения термосопротивления (ТС):
— термометры сопротивления,
— ТС, нагреваемые током.
В последнем случае изменение температуры ТС определяется условиями теплоотдачи: скоростью потока обдува (в анемометрах), разреженностью (в вакуумметрах), влажностью окружающей среды и т. п.
В настоящее время наиболее широко применяют термисторы (непроволочные ТС), изготовленные на основе оксидов, сульфидов и карбидов металлов. Сопротивление таких термисторов зависит от температуры по закону
![]()
где Т — температура (по Кельвину),В— постоянная. Достоинством термисторов является большой ТКС (температурный коэффициент сопротивления), достигающий изменения сопротивления на 3% отR0на 1°С, возможность получения высокоомных датчиков.