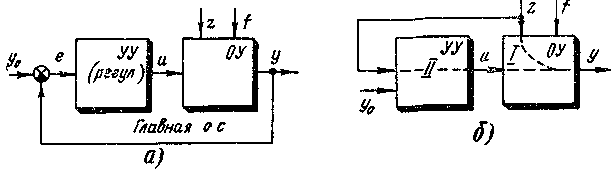
Рис 1-2 а — структура системы автоматического управления, б — структура управляющего устройства
характеризуемом переменной Y, информация о желаемом состоянии объектаY0 и информация о действующих на объект возмущенияхZ. Поскольку воздействияY и Z могут иметь различную физическую природу (см. примеры 1-1, 1-2), то вначале необходимо их преобразовать в величины, удобные для обработки в вычислительном устройствеВУ (рис. 1-2,6). Такими преобразователями являются чувствительные элементы — датчики, совокупность которых образуетчувствительное устройство (ЧУ).
Вычислительное устройство по поступающей в него информации формирует законы управления по правилам (алгоритмам), которые в него заложены конструктором. Найденные законы управления преобразуются в различные по физической природе управляющие воздействия с поощьюисполнительных устройств (ИУ).
Далее будут рассмотрены только системы регулирования одной величины у (одномерные САР).
В зависимости от желаемого характера изменения регулируемой переменной различают:
а) системы
автоматической стабилизации, в которых
регулируемая величина должна поддерживаться
постоянной![]() ;
;
б) системы
программного регулирования, в которых
регулируемая величина должна изменяться
по заранее известному закону![]() ;
;
в) следящие
системы, в которых регулируемая
величина должна изменяться по заранее
неизвестному закону![]() ;
;
г) система
экстремального регулирования, в
которых регулируемая величина должна
поддерживаться максимальной (или
минимальной)![]() (min), причем это значение
может быть заранее неизвестным.
(min), причем это значение
может быть заранее неизвестным.
В связи со стремлением наилучшим образом управлять объектами привлекательна задача создания оптимальных САР, выполняющих свои функции наилучшим образом с точки зрения выбранногокритерия качества. Поскольку условия работы САР могут меняться в зависимости от возмущении наОУ, то может оказаться, что оптимальная САР также должна менять во времени характеристики своегоУУ (например, изменять алгоритму управления или параметры этих алгоритмов). Обычно в САР не заложена возможность автоматически изменять характеристикиУУоднако в последние годы большое внимание привлекаютадаптивные САР (самонастраивающиеся системы автоматического управления), которые автоматически изменяют (настраивают) характеристикиУУтаким образом; чтобы работа САР, оцениваемая по выбранному критерию качества, была наилучшей [1].
§ 1-2. Основные принципы автоматического регулирования
Различают два основных принципа регулирования: регулирование по отклонению (принцип Ползунова (1765)-Уатта (1785) ирегулирование по возмущению (принцип Понселе). Рассмотрим эти принципы.
При регулировании
по отклонению действительное
значение регулируемой величины
сравнивается с желаемым значением, и
управление формируется в УУ (регуляторе)
в зависимости ототклонения (ошибки
регулирования![]() (рис. 1-3,а). Поскольку в, этом случае
производится проверка результатов
управления, то системы такого типа
получили названиезамкнутые САР. Как
видно из блок-схемы такой системы, в ней
имеется цепьобратной связи (о. с.)
по которой информация с выхода САР
о состоянииОУ поступает на вход
системы для сравнения с информацией о
желаемом состоянии. Заметим, что в ряде
случаев для улучшения (коррекции свойств
САР в ней имеются еще связи типа обратных,
которые в отличие от главной (информационной)
обратной связи, называют корректирующими.
Таким образом, влияние возмущенийz
на регулируемую величинуукомпенсируется в замкнутой САР изменением
управляющего воздействия и, зависящего
от отклоненияе.
(рис. 1-3,а). Поскольку в, этом случае
производится проверка результатов
управления, то системы такого типа
получили названиезамкнутые САР. Как
видно из блок-схемы такой системы, в ней
имеется цепьобратной связи (о. с.)
по которой информация с выхода САР
о состоянииОУ поступает на вход
системы для сравнения с информацией о
желаемом состоянии. Заметим, что в ряде
случаев для улучшения (коррекции свойств
САР в ней имеются еще связи типа обратных,
которые в отличие от главной (информационной)
обратной связи, называют корректирующими.
Таким образом, влияние возмущенийz
на регулируемую величинуукомпенсируется в замкнутой САР изменением
управляющего воздействия и, зависящего
от отклоненияе.
При регулировании по возмущению управление вырабатывается лишь на основе желаемого изменения регулируемой величиныy0и в зависимости от возмущенияz. (рис. 1-3,б). В этом случае не производится проверка результата управления, и система