§ 2-2. Индуктивные датчики
Индуктивные датчики служат для преобразования угловых или линейных перемещений в напряжение переменного тока. По сравнению с потенциометрическими они имеют то достоинство, что не имеют трущихся контактов, Это повышает их надежность, и такие датчики практически не имеют износа.
Действие их основано на изменении индуктивности катушки с ферромагнитным сердечником (собственно индуктивные датчики) или взаимоиндуктивности катушек (трансформаторные датчики) при перемещении сердечника
Простейший индуктивный датчик (рис. 2-4,а,б) представляет собой катушку,

Рис 2-4 Индуктивные датчики и их характеристики
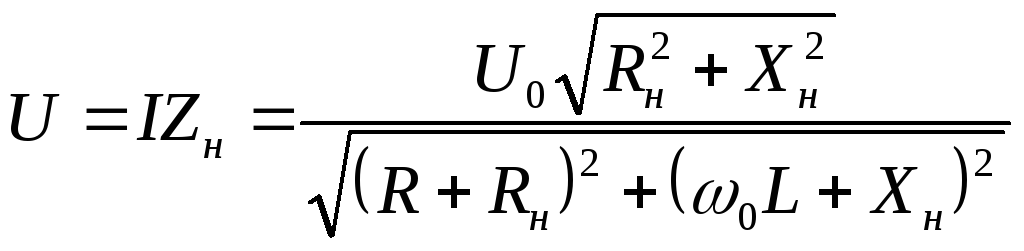
размещенную на ферромагнитном сердечнике, и включенную в цепь переменного тока, последовательно с сопротивлением ZНнагрузки (рис. 2-4,а). Действующее значение выходного напряжения равно
 ,
,
где R, L - активное и индуктивное сопротивления катушки датчика;
Rн, Xн — активное и реактивное сопротивления нагрузки.
Поскольку для катушки (рис. 2-4,а), пренебрегая влиянием магнитного сопротивления сердечника, можно записать
![]() ,
,
где w— число витков катушки;
S— площадь поперечного сечения сердечника;
μ0— магнитная проницаемость воздуха,
то для
![]()
![]() (2-2)
(2-2)
На практике
из-за того, что![]() (рис. 2-4,в), статическаяxарактеристика
датчика (рис.2-4,г) не является
линейной: при δ=0 имеется остаточное
напряжение, обусловленное отличным от
нуля магнитным сопротивлением сердечника,
при больших δ имеется насыщение,
обусловленное возрастанием потоков
рассеяния. Поэтому зона линейности
такого датчика имеет обычно небольшую
величину, при этом чувствительность
датчика в этой зоне равна (см. 2-2)
(рис. 2-4,в), статическаяxарактеристика
датчика (рис.2-4,г) не является
линейной: при δ=0 имеется остаточное
напряжение, обусловленное отличным от
нуля магнитным сопротивлением сердечника,
при больших δ имеется насыщение,
обусловленное возрастанием потоков
рассеяния. Поэтому зона линейности
такого датчика имеет обычно небольшую
величину, при этом чувствительность
датчика в этой зоне равна (см. 2-2)
![]() . (2-3)
. (2-3)
Как и для потенциометрических датчиков, частота (ω0питающего напряженияU0выбирается по соотношению (2-1), поэтому для индуктивных датчиков применяют источники напряжения повышенной частоты (400, 500, 1000гц), что позволяет также уменьшить габариты датчика.
На практике для повышения точности (уменьшения погрешностей от колебаний температуры и питающего напряжения), увеличения зоны линейности датчика, а также для получения двухтактной статической характеристики (рис. 2-5,б) применяютдифференциальные индуктивные датчики, включаемые обычно по мостовой схеме (рис. 2-5,а), когда в одну диагональ моста подается питающее напряжение, а в другую включено сопротивление нагрузки. Схема настраивается таким образом, чтобы прих=0 сердечник занимал среднее положение. В этом случае мост сбалансирован. При изменении знаках изменяется на 180° фаза напряженияU.
Недостаток такого датчика — наличие гальванической связи между цепью нагрузки и цепью питания — устраняется в трансформаторных датчиках. На рис. 2-6 приведена схема и характеристика так называемогодифференциального
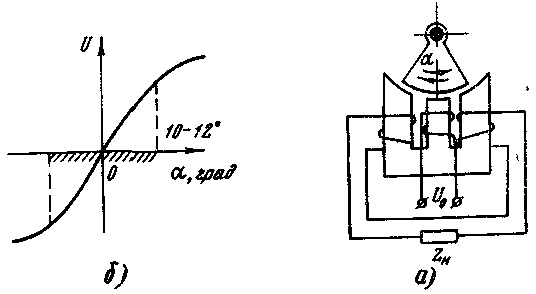
Рис 2-5 Дифференциальный индуктивный датчик
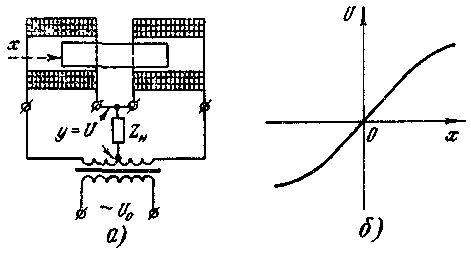
Рис 2 6 Дифференциальный трансформатор
трансформатора, широко применяемого в автоматических системах. В позиционных следящих системах применяются также двухкоординатные (следящие) трансформаторы.
§ 2-3. Генераторные датчики
В промышленной автоматике наиболее широко применяют индукционные и термоэлектрические датчики.
Индукционные датчики применяются для измерения мгновенных значений скорости (угловой или линейной), а также для получения напряжений, пропорциональных производным по времени от перемещения (или от другой физической величины, преобразованной в перемещение). Производные, как увидим далее, часто используются для повышения качества процессов регулирования в автоматических системах.
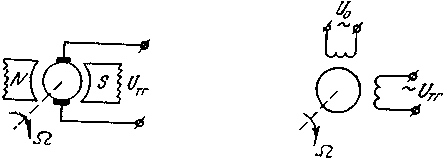
Действие индукционных датчиков основано на использовании э.д.с., возникающей в проводнике при пересечении им магнитных силовых линий. В устройствах автоматики широко применяются тахогенераторы (ТГ) — индукционные машины постоянного или переменного тока.
Среди тахогенераторов постоянного тока надо отметить ТГ с возбуждением от постоянных магнитов (рис. 2-7,а). Конструктивно они мало отличаются от миниатюрных двигателей постоянного тока. Основным недостатком их является постепенное размагничивание постоянных магнитов (от толчков, от действия поля э.д.с. катушки).
Среди ТГ переменного
тока надо отметитьасинхронные с полым
ротором, которые конструктивно не
отличаются от миниатюрных асинхронных
двигателей с полым ротором выполненным
из алюминия или фосфористой бронзы. В
фазах статора расположены две обмотки,
сдвинутые по отношению друг к другу на
90 эл. градусов, при этом одна подключается
к источнику питания U0,
вторая является выходной (рис. 2-7,6). При
неподвижном ротореUтг=0,
а при![]() в выходной обмотке наводится э.д.с.
в выходной обмотке наводится э.д.с.