

Рис 1-3 а —схема регулирования по отклонению, б — схема регулирования по возмущению
является разомкнутой. Компенсация влияния возмущений на регулируемую величину достигается за счет введения в управление составляющей, зависящей от возмущения. Понятно, что эффект от этой составляющей в управлении должен в значительной мере компенсировать эффект от возмущения. Если при этом достигнута полная компенсация действия возмущения, то полученная САР являетсяинвариантной (безразличной) к данному возмущению. Для обеспечения инвариантности необходимо «организовать» в системе второй канал (см. пунктирII на рис. 1-3,6) передачи воздействия от возмущения (принцип двухканальности Б. Н. Петрова (1955) при создании инвариантных САР). Ясно, что для успешного регулирования по этому принципу необходимо контролировать все возмущения, влияющие на регулируемую величину, что не всегда возможно (из-за большого числа возмущений либо из-за отсутствия датчиков некоторых возмущений). Таким образом, регулирование по возмущению имеет ограниченные возможности. Однако оно имеет и одно достоинство: управление по возмущению для инерционных объектов, каковыми является большинство объектов промышленности, является более быстродействующим, чем управление по отклонению. Это понятно: в САР (рис. 1-3,а) для формирования управления необходимо, чтобы на выходеОУ проявился эффект от возмущения, на что в инерционных объектах требуется значительное время, а в САР (рис. 1-3,б) управление формируется в темпе с действием возмущения. Поэтому в настоящее время стремятся совместить в одной системе оба принципа регулирования. Получающиеся в этом случае комбинированныеСАР имеют точность замкнутых и быстродействие разомкнутых систем, т. е. являются более высококачественными системами, чем построенные с использованием только одного принципа.
Законы управления, формируемые в УУ(регуляторе), могут иметь следующий вид:
1)
![]() — пропорциональный закон (П-регулятор);
— пропорциональный закон (П-регулятор);
2)
![]() — интегральный закон (И-регулятор);
— интегральный закон (И-регулятор);
3)
![]() — дифференциальный закон (Д-регулятор).
В чистом виде эти законы в промышленных
регуляторах обычно не применяют (особенно
по п. 3, поскольку регулирование по
производной, предложенное братьями
Сименс (1845), неработоспособно). Широко
используют следующие законы управления:
— дифференциальный закон (Д-регулятор).
В чистом виде эти законы в промышленных
регуляторах обычно не применяют (особенно
по п. 3, поскольку регулирование по
производной, предложенное братьями
Сименс (1845), неработоспособно). Широко
используют следующие законы управления:
4)
![]() — пропорционально-интегральный
закон (ПИ-регулятор);
— пропорционально-интегральный
закон (ПИ-регулятор);
5)
![]() — пропорциейально-дифференциальный
закон (ПД-регулятор);
— пропорциейально-дифференциальный
закон (ПД-регулятор);
6)
![]() — (ПИД-регулятор).
— (ПИД-регулятор).
В общем виде закон (алгоритм) регулирования с учетом возможного воздействия по возмущению имеет вид
 (1-1)
(1-1)
Оказывается, что в зависимости от закона управления САР имеет различные свойства. В частности, САР может быть статической илиастатической по отношению к какому-либо воздействию.
САР называется астатической по отношению к воздействию, если в установившемся состоянии ошибка регулирования отсутствует для любых постоянных значений воздействия. В противном случае она является статической.
Принцип статического и астатического регулирования поясним на примере САР уровня жидкости в резервуаре (рис. 1-4). Уровень регулируется поднятием или опусканием заслонки в питающей магистрали. Система рис. 1-4,а является статической по отношению к воздействию Р-расходу жидкости из резервуара. В самом деле, отрегулируем; систему так, чтобы при номинальном расходеР0 уровень жидкости был равену0. Если расход увеличится, то для сохранения равновесия необходимо настолько
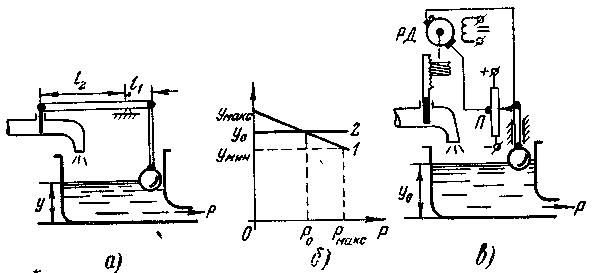
Рис. 1-4. а — статическая САР; б — статические характеристики, двух типов САР, в — астатическая САР
же увеличить и приток жидкости. Для этого надо приподнять заслонку, что может быть сделано, если поплавок опустится ниже уровня уо. Таким образом, равновесие (установившего состояние) может быть достигнуто лишь при наличие постоянного отклоненияе=уо—у. Аналогичное явление возникает и при уменьшении расхода по сравнению сР0, но при этом отклонение имеет другой знак (характеристика1 на рис. 1-4,б). Таким образом, в системе возникает неравномерность регулирования, которую можно оценить относительной величинойстатизма
![]() . (1-2)
. (1-2)
Постоянное отклонение в указанном режиме САР носит название статической ошибки.
Рассмотрим систему
рис. 1-4,в, в которой перемещение поплавка
передается на движок потенциометра П
со средней точкой. Можно отрегулировать
систему так, чтобы приу=уодвижок потенциометра находился на
средней точке (проще всего регулировку
производить при закрытой заслонке иР=0). В этом случае на реверсивный
двигательРД напряжение не подается
и перемещения заслонки не происходит.
Легко видеть, что установившееся
состояние в системе при любых постоянных
расходах![]() может быть достигнуто только в том
случае, если движок потенциометра
находится на средней точке, т. е. приу=у0(см. характеристику2
на рис. 1-4,6). Таким образом, в данной
системе отсутствует статическая ошибка,
и САР является астатической.
может быть достигнуто только в том
случае, если движок потенциометра
находится на средней точке, т. е. приу=у0(см. характеристику2
на рис. 1-4,6). Таким образом, в данной
системе отсутствует статическая ошибка,
и САР является астатической.
Заметим, что повышение точности в астатической САР по сравнению со статической дается за счет определенного усложнения системы, именно — за счет введения вспомогательного двигателя — серводвигателя. В чем проявляется его действие, с точки зрения закона управления? Примем, что управление и (положение заслонки) равно нулю приу=у0. Тогда для статической системы (рис. 1-4,а) можно написать
![]() ,
где
,
где![]() ,
,
а для астатической системы (рис. 1-4, в)
![]() ,
,
где Θ, Ω — угол и
скорость поворота вала РД (угловое
перемещение преобразуется в линейное
и посредством червячного механизма с
зубчатой рейкой). Если для простоты
принять, что![]() (на самом деле связь между скоростью и
напряжением на двигателе не является
мгновенной и дается дифференциальным
уравнением — см. § 3-2), то
(на самом деле связь между скоростью и
напряжением на двигателе не является
мгновенной и дается дифференциальным
уравнением — см. § 3-2), то
![]() .
.
Таким образом, в статической САР (рис. 1-4,а) используется пропорциональный закон управления, а в астатической (рис. 1-4,в) — интегральный. Эта закономерность может быть сформулирована следующим образом: для получения астатизма необходимо вводить в закон регулирования интегральную составляющую.