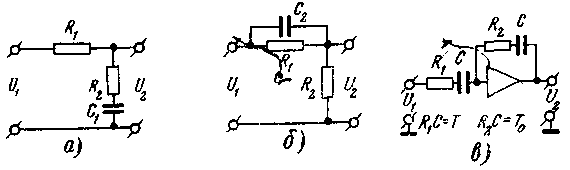
Рис 4-5 Примеры интегрирующих звеньев
магнитный поток в индуктивности, имеющей число вит ков w,
![]() ,
,
угол поворота вала, вращающегося со скоростью Ω,
![]() ,
,
уровень воды в цилиндрическом резервуаре сечения S
![]() .
.
Передаточная функция интегрирующего звена легко находится из (4-8) по теореме о дифференцировании (или интегрировании при нулевых начальных условиях) оригинала (см. п. 5, 6 табл. 3-1):
![]() ,
,
![]() . (4-5)
. (4-5)
АФХ показана на
рис. 4-6,а. Она имеет вид прямой, при этом
фазовый сдвиг на всех частотах равен
![]() .
.
ЛАЧХ также имеет вид прямой с наклоном —20 дб/дек (рис. 4-6,б)
![]() ,
,
![]() . (4-10)
. (4-10)
Временные динамические характеристики (рис. 4-6,г, д) записываются как
![]() ,
,
![]() (4-11)
(4-11)
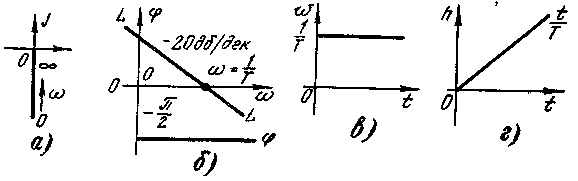
Рис 4-6 Динамические характеристики интегрирующего звена
4. Дифференцирующее звено(идеальное) описывается уравнением
![]() . (4-12)
. (4-12)
Пример 4-4.Примерами таких звеньев могут служить электрическая емкость (рис. 4-7,а), индуктивность (б), тахогенератор(ТГ) с постоянными магнитами(в). Действительно, ток в емкости
![]()
напряжение на индуктивности
![]()
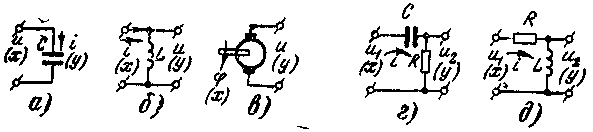
Рис. 4-7. Примеры идеальных и реальных дифференцирующих
напряжение ТГ постоянного тока
![]() .
.
Надо заметить, что практически не существует реальных элементов, на выходе которых точно воспроизводилась бы производная от любого входного сигнала. Если бы это было так, то, подав на такой элемент скачкообразное входное воздействие, можно было бы получить на выходе δ-функцию, чего в реальных устройствах не бывает. Формальная запись для напряжений и токов в индуктивности и емкости (пример 4-4) не отражает законов коммутации электрических схем (напряжение на емкости и ток в индуктивности в реальных системах не могут измениться скачком). Аналогично нельзя, например, скачком изменить угол поворота вала реального ТГ, поскольку это потребовало бы бесконечно большого момента. Поэтому, хотя в структурных схемах применение идеальных дифференцирующих звеньев оправдано, практически они являются абстракциями.Реальное дифференцирующее звено описывается уравнением
![]() . (4-13)
. (4-13)
Это звено, имеющее передаточную функцию
![]() ,
,
![]() , (4-14)
, (4-14)
может быть представлено как последовательное соединение идеального дифференцирующего и инерционного звеньев.
Пример 4-5. Примерами таких звеньев являются СR- иLR- цепи (рис. 4-7,г, д), для которых можно записать:
для CR- цепи-
![]() ,
,
где
![]() ,
поэтому после дифференцирования
обеих частей исходного уравнения
получаем
,
поэтому после дифференцирования
обеих частей исходного уравнения
получаем
![]() ;
;
для RL- цепи
![]() ,
,
где
![]() ,
поэтому
,
поэтому
![]() .
.
Из механических аналогов реального дифференцирующего звена следует назвать масляный катаракт, широко применяемый в механических САР (для авиационных, дизельных двигателей). АФХ реального дифференцирующего звена показана на рис. 4-8,а. Она имеет вид полуокружности,
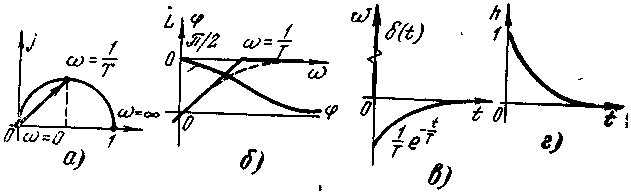
Рис. 4-8. Динамические характеристики реального дифференцирующего звена
причем на сопрягающей
частоте коэффициент усиления звена
равен
![]() ,
а фазовый сдвиг
,
а фазовый сдвиг![]() ,
хотя уже на больших частотах опережение
по фазе практически исчезает. Тем не
менее свойство дифференцирующих звеньев
давать опережение по фазе широко
используется при коррекции САР. Общее
выражение для АЧХ и ФЧХ имеет вид
,
хотя уже на больших частотах опережение
по фазе практически исчезает. Тем не
менее свойство дифференцирующих звеньев
давать опережение по фазе широко
используется при коррекции САР. Общее
выражение для АЧХ и ФЧХ имеет вид
![]() ,
,
![]()
ЛАЧХ звена записывается как
![]()
Построение асимптотической ЛАЧХ по этому выражению проводится, как и для инерционного звена, с помощью двух асимптот (рис. 4-8,б)
 (4-15)
(4-15)
По теореме разложения (см. п. 9 табл. 3-1) находим характеристики во временной области (рис. 4-8,в, г)
![]() , (4-16а)
, (4-16а)
и после дифференцирования получаем (с учетом скачка переходной функции при t=0)
![]() . (4-16б)
. (4-16б)
5. Упругое (инерционно-форсирующее) звено описывается уравнением
![]() . (4-17)
. (4-17)
В зависимости от
отношения
![]() звено называют упругим интегрирующим
(τ<1) или упругим дифференцирующим
(τ>1), поскольку в первом случае оно
дает, как показано ниже, отставание по
фазе, а во втором — опережение. Передаточная
функция звена имеет вид
звено называют упругим интегрирующим
(τ<1) или упругим дифференцирующим
(τ>1), поскольку в первом случае оно
дает, как показано ниже, отставание по
фазе, а во втором — опережение. Передаточная
функция звена имеет вид
![]() ,
,
![]() . (4-18)
. (4-18)
Пример 4-6 [2].РассмотримRС- делители напряжения
по схеме рис. 4-9,а, б; получаем выражение для операторного коэффициента передачи