

4 ЗАГАЛЬНІ ТЕОРЕМИ ДИНАМІКИ
4.1 Теорема про зміну кількості руху
4.1.1 Імпульс сили
4.1.1.1 Імпульс сили – це фізична величина, яка характеризує ____________ за деякий проміжок часу.
а) – “дію сили на матеріальний об’єкт”;
б) – “зміну швидкості матеріального об’єкту за деякий проміжок часу”;
в) – “здатність сили виконати роботу”;
г) – “пришвидшеннями”;
д) – “потужність сили”.
4.1.1.2 Вкажіть правильну формулу вектора імпульсу змінної сили.
а)
 ;
б)
;
б)
 ;
в)
;
в)
 ;
;
г)
 ;
д)
;
д)
 .
.
4.1.1.3 Вкажіть правильну формулу вектора імпульсу сталої сили.
а)
![]() ;
б)
;
б)
![]() ;
в)
;
в)
![]() ;
;
г)
![]() ;
д)
;
д)
![]() .
.
4.1.1.4 Імпульс рівнодійної системи сил за деякий проміжок часу дорівнює імпульсів складових сил системи за цей же проміжок часу.
а) – “арифметичній сумі”;
б) – “геометричній сумі”;
в) – “алгебраїчній сумі”;
г) – “добутку”;
д) – “половині геометричної суми”.
4.1.1.5 Імпульс сили – це величина.
а) – “векторна”;
б) – “скалярна”;
в) – “векторна або скалярна”;
г) – “теплова”;
д) – “електрична”.
4.1.1.6 Вектор елементарного імпульсу сили за напрямом ___________ з вектором сили.
а) – “не збігається”;
б) – “перпендикулярний”;
в) – “збігається”;
г) – “паралельний”;
д) – “довільний”.
4.1.1.7 Вкажіть правильну одиницю вимірювання імпульсу сили.
а) – „Н/с”; б) –„Н·с2”; в) – „Н·с"; г) – „кг2·м/с2”; д) – „кг·м2”.
4.1.1.8 Вкажіть правильні формули проекції імпульсу змінної сили на декартові осі координат.
а)
 .
.
б)
 .
.
в)
 .
.
г)
 .
.
д)
 .
.
4.1.1.9 Вкажіть правильні формули проекції імпульсу змінної сили на декартові осі координат.
а)
 ;
;
б)
 ;
;
в)
 ;
;
г)
 ;
;
д)
 .
.
4.1.1.10
Вкажіть
правильні вирази напрямних конусів
вектора імпульсу сили
![]() .
.
а)
![]() ;
;
б)
![]() ;
;
в)
![]() .
.
г)
![]()
![]() ;
;
д)
![]()
![]() .
.
4.1.1.11
Вкажіть
правильний вираз імпульсу сили, якщо
його проекції на декортові осі координат
![]() i
i
![]() .
.
а)
![]() ;
б)
;
б)
![]() ;
;
в)
![]() ;
г)
;
г)
![]() ;
;
д)
![]() .
.
4.1.2 Кількість руху матеріальної точки і механічної системи
4.1.2.1 Кількістю руху матеріальної точки називають векторну величину, яка дорівнює .
а) – “добутку маси точки на її швидкість”;
б) – “добутку маси точки на квадрат її швидкості”;
в) – “частці маси точки на її швидкість”;
г) – “добутку квадрату маси точки на її швидкість”;
д) – “подвійному добутку маси точки на її швидкість”.
4.1.2.2 Кількість руху матеріальної точки ____________величина.
а) – “скалярна”;
б) – “векторна”;
в) – “скалярна або векторна”;
г) – “теплова”;
д) – “електрична”.
4.1.2.3 Вкажіть правильну одиницю вимірювання кількості руху.
а) – „Н/с”; б) – „Н·с2”; в) – „Н2·с”; г) – „кг·м/с”; д) – „кг·м2”.
4.1.2.4 Вкажіть правильну формулу кількості руху матеріальної точки.
а)
![]() ;
б)
;
б)![]() ;
в)
;
в)![]() ;
г)
;
г)
![]() ;
д)
;
д)
![]() .
.
4.1.2.5 Кількість руху матеріальної точки є вектор, який за напрямком швидкості точки.
а) – “протилежний вектору”;
б) – “збігається з вектором”;
в) – “перпендикулярний вектору”;
г) – “паралельний вектору”;
д) – “направлений в сторону вгнутості траєкторії руху точки перпендикулярно вектору”.
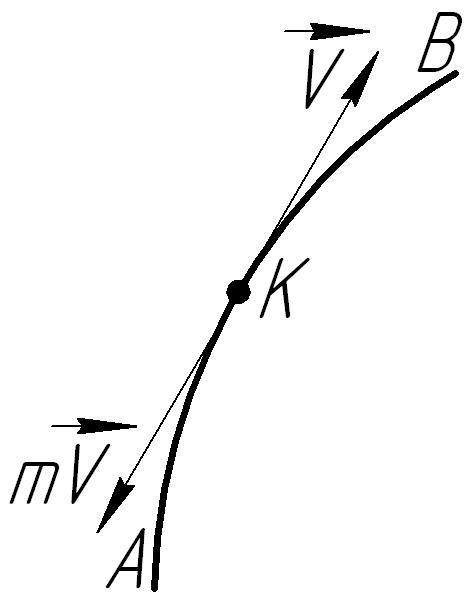
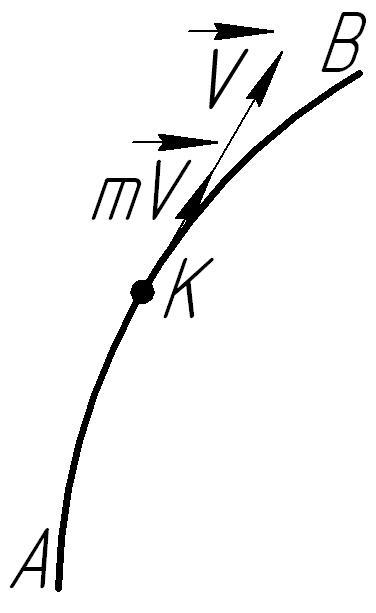
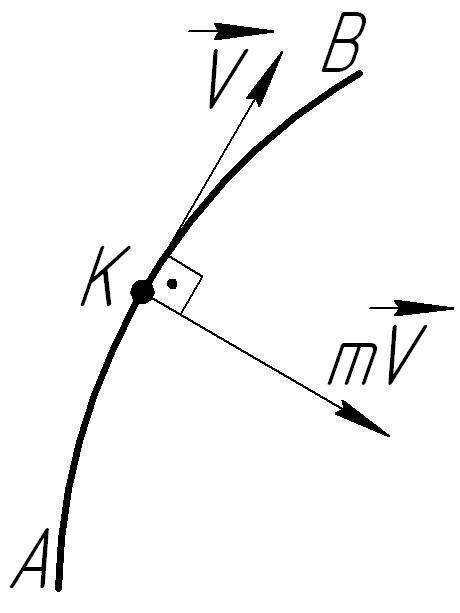
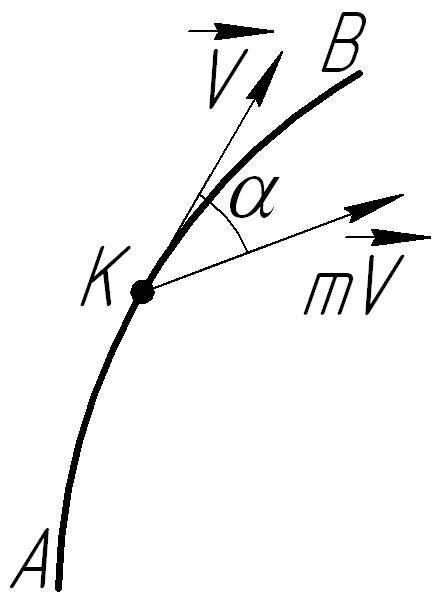
4.1.2.6 Вкажіть правильний рисунок напрямку вектора кількості руху матеріальної точки.
|
а) |
|
б) |
|
в) |
|
|
г) |
|
д)
|
|
|
|
4.1.2.7 Вкажіть правильні вирази проекції вектора кількості руху на декартові осі координат.
а)
![]() ;
;
б)
![]() ;
;
в)
![]() ;
;
г)
![]() ;
;
д)
![]() .
.
4.1.2.8 Вкажіть правильні вирази проекції вектора кількості руху на декартові осі координат.
а)
![]() ;
;
б)
![]() ;
;
в)
![]() ;
;
г)
![]() ;
;
д)
![]() .
.
4.1.2.9 Кількістю руху механічної системи називають _______________ кількостей руху всіх матеріальних точок даної системи.
а) – “скалярну суму (головний вектор)”;
б) – “векторну суму (головний вектор)”;
в) – “подвійну векторну суму”;
г) – “подвійну скалярну суму”;
д) – “суму”.
4.1.2.10 Вкажіть правильний вираз кількості руху механічної системи (головного вектора кількості руху).
а)
![]() ;
б)
;
б)
![]() ;
в)
;
в)
![]() ;
;
г)
![]() ;
д)
;
д)
![]() .
.
4.1.2.11 Вкажіть правильний вираз кількості руху механічної системи (головного вектора кількості руху).
а)
![]() ;
б)
;
б)
![]() ;
в)
;
в)
![]() ;
;
г)
![]() ;
д)
;
д)
![]() .
.
4.1.2.12 Кількість руху механічної системи дорівнює ________ її центра мас.
а) – “добутку маси системи на квадрат швидкості”;
б) – “добутку маси системи на швидкість”;
в) – “частці маси системи на швидкість”;
г) – “подвійному добутку маси системи на швидкість”;
д) – “потрійному добутку маси системи на швидкість”.
4.1.2.13 Вкажіть правильні вирази проекції вектора кількості руху механічної системи на декартові осі координат.
а)
![]() ;
;
б)
![]() ;
;
в)
![]() ;
;
г)
![]() ;
;
д)
![]() .
.
4.1.2.14 Вкажіть правильні вирази проекції вектора кількості руху механічної системи на декартові осі координат.
а)
![]() ;
;
б)
![]() ;
;
в)
![]() ;
;
г)
![]() ;
;
д)
![]() .
.
4.1.2.15 Кількість руху є мірою руху.
а) – “тільки обертального”;
б) – “тільки сферичного”;
в) – “тільки поступального”;
г) – “механічного”;
д) – “тільки плоскопаралельного”.
4.1.3 Теорема про зміну кількості руху матеріальної точки і механічної системи
4.1.3.1 Перша похідна за часом від кількості руху матері-альної точки дорівнює сумі всіх сил, що діють на точку.
а) – “арифметичній”;
б) – “алгебраїчній”;
в) – “геометричній”;
г) – “подвійній алгебраїчній”;
д) – “подвійній геометричній”.
4.1.3.2 Перша похідна за часом від кількості руху матеріальної точки дорівнює геометричній сумі ________сил, що діють на точку.
а) – “всіх”;
б) – “внутрішніх”;
в) – “зовнішніх і внутрішніх”;
г) – “пасивних”;
д) – “зовнішніх і пасивних”.
4.1.3.3 Вкажіть правильний вираз теореми про зміну кількості руху матеріальної точки в диференціальній формі.
а)
![]() ;
б)
;
б)
![]() ;
;
в)
![]() ;
г)
;
г)
![]() ;
;
д)
![]() .
.
4.1.3.4 Диференціал від кількості руху матеріальної точки дорівнює сумі елементарних імпульсів всіх сил, що діють на точку.
а) – “геометричній”;
б) – “алгебраїчній”;
в) – “арифметичній”;
г) – “подвійній алгебраїчній”;
д) – “подвійній геометричній”.
4.1.3.5 Диференціал від кількості руху матеріальної точки дорівнює геометричній сумі елементарних імпульсів ________ сил, що діють на точку.
а) – “зовнішніх і внутрішніх”;
б) – “всіх”;
в) – “внутрішніх”;
г) – “пасивних”;
д) – “зовнішніх і пасивних”.
4.1.3.6 Вкажіть правильний вираз теореми про зміну кількості руху матеріальної точки в диференціальній формі.
а)
![]() ;
б)
;
б)
![]() ;
;
в)
![]() ;
г)
;
г)
![]() ;
;
д)
![]() .
.
4.1.3.7 Зміна кількості руху матеріальної точки за деякий проміжок часу дорівнює сумі імпульсів всіх сил, що діють на точку, за цей же проміжок часу.
а) – “арифметичній”;
б) – “алгебраїчній”;
в) – “геометричній”;
г) – “подвійній геометричній”;
д) – “подвійній алгебраїчній”.
4.1.3.8 Зміна кількості руху матеріальної точки за деякий проміжок часу дорівнює геометричній сумі імпульсів ________ сил, що діють на точку, за цей же проміжок часу.
а) – “внутрішніх”;
б) – “всіх”;
в) – “зовнішніх і внутрішніх”;
г) – “пасивних”;
д) – “зовнішніх і пасивних”.
4.1.3.9 Вкажіть правильний вираз теореми про зміну кількості руху матеріальної точки в інтегральній (кінцевій) формі за деякий проміжок часу.
а)
![]() ;
б)
;
б)
![]() ;
;
в)
![]() ;
г)
;
г)
![]() ;
;
д)
![]() .
.
4.1.3.10 Вкажіть правильні диференціальні вирази теореми про зміну кількості руху матеріальної точки в проекціях на декартові осі координат.
а)
![]() ;
;
б)
![]()
![]()
в)
![]() ;
;
г)
![]() ;
;
д)
![]() .
.
4.1.3.11 Вкажіть правильні диференціальні вирази теореми про зміну кількості руху матеріальної точки в проекціях на декартові осі координат.
а)
![]() ;
;
б)
![]()
![]() ;
;
в)
![]() ;
;
г)
![]() ;
;
д)
![]() .
.
4.1.3.12 Вкажіть правильні диференціальні вирази теореми про зміну кількості руху матеріальної точки в проекціях на декартові осі координат.
а)
![]() ;
;
б)
![]()
![]() ;
;
в)
![]() ;
;
г)
![]() ;
;
д)
![]() .
.
4.1.3.13 Вкажіть правильні інтегральні (в кінцевій формі) вирази теореми про зміну кількості руху матеріальної точки в проекціях на декартові осі координат.
а)![]() ;
;
б)![]() ;
;
|
в) |
|
г)![]() ;
;
д)![]() .
.
4.1.3.14 Вкажіть правильні інтегральні (в кінцевій формі) вирази теореми про зміну кількості руху матеріальної точки в проекціях на декартові осі координат.
а)
![]() ;
;
б)
![]() ;
;
в)
![]() ;
;
г)
![]() ;
;
д)
![]()
![]() .
.
4.1.3.15 Вкажіть правильні диференціальні вирази теореми про зміну кількості руху матеріальної точки в проекціях на декартові осі координат.
а)
![]() ;
;
б)
![]() ;
;
в)
![]()
![]() ;
;
г)
![]() ;
;
д)
![]() .
.
4.1.3.16 Перша похідна за часом від кількості руху механічної системи дорівнює сумі (головному вектору) всіх зовнішніх сил, що діють на систему.
а) – “алгебраїчній”;
б) – “геометричній”;
в) – “арифметичній”;
г) – “подвійній алгебраїчній”;
д) – “подвійній геометричній”.
4.1.3.17 Перша похідна за часом від кількості руху механічної системи дорівнює геометричній сумі (головному вектору) всіх ________ сил, що діють на систему.
а) – “тільки пасивних (реакцій в’язей)”;
б) – “внутрішніх”;
в) – “зовнішніх”;
г) – “пасивних і внутрішніх”;
д) – “пасивних і зовнішніх”.
4.1.3.18 Вкажіть правильний вираз теореми про зміну кількості руху механічної системи в диференціальній формі.
а)![]() ;
б)
;
б)![]() ;
в)
;
в)![]() ;
;
г)
![]() д)
д)
![]() .
.
4.1.3.19 Вкажіть правильний вираз теореми про зміну кількості руху механічної системи в диференціальній формі.
а)
![]() ;
б)
;
б)
![]() ;
;
в)
![]() ;
г)
;
г)
![]() ;
д)
;
д)
![]() .
.
4.1.3.20 Диференціал від кількості руху механічної системи дорівнює сумі елементарних імпульсів всіх зовнішніх сил, що діють на систему.
а) – “алгебраїчній”;
б) – “геометричній”;
в) – “алгебраїчній”;
г) – “подвійній алгебраїчній”;
д) – “подвійній геометричній”.
4.1.3.21 Диференціал від кількості руху механічної системи дорівнює геометричній сумі елементарних __________ сил, що діють на систему.
а) – “робіт всіх зовнішніх”;
б) – “імпульсів всіх внутрішніх”;
в) – “імпульсів всіх зовнішніх”;
г) – “робіт всіх зовнішніх і внутрішніх”;
д) – “робіт всіх пасивних”.
4.1.3.22 Зміна кількості руху механічної системи за деякий проміжок часу дорівнює сумі імпульсів всіх зовнішніх сил, що діють на систему, за цей же проміжок часу.
а) – “геометричній”;
б) – “алгебраїчній”;
в) – “арифметичній”;
г) – “подвійній геометричній”;
д) – “подвійній алгебраїчній”.
4.1.3.23 Зміна кількості руху механічної системи за деякий проміжок часу дорівнює геометричній сумі _________ сил, що діють на систему, за цей же проміжок часу.
а) – “робіт всіх зовнішніх”;
б) – “імпульсів всіх внутрішніх”;
в) – “імпульсів всіх зовнішніх”;
г) – “імпульсів всіх зовнішніх і внутрішніх”;
д) – “робіт всіх пасивних”.
4.1.3.24 Вкажіть правильний вираз теореми про зміну кількості руху механічної системи в інтегральній формі.
а)
![]() ;
б)
;
б)
![]() ;
в)
;
в)
![]() ;
;
г)
 ;
д)
;
д)
![]() .
.
4.1.3.25 Вкажіть правильні диференціальні вирази теореми про зміну кількості руху механічної системи в проекціях на декартові осі координат.
|
а) |
|
б) |
|
|
в) |
|
г) |
|
|
д) |
|
|
|

4.1.3.26 Вкажіть правильні диференціальні вирази теореми про зміну кількості руху механічної системи в проекціях на декартові осі координат.
а)
![]() ;
;
б)
![]()
![]() ;
;
в)
![]() ;
;
г)
![]() ;
;
д)
![]() .
.
4.1.3.27 Вкажіть правильні диференціальні вирази теореми про зміну кількості руху механічної системи в проекціях на декартові осі координат.
а)
![]() ;
;
б)
![]() ;
;
в)
![]() ;
;
г)
![]() ;
;
д)
![]() .
.
4.1.3.28 Вкажіть правильні інтегральні (в кінцевій формі) вирази теореми про зміну кількості руху механічної системи в проекціях на декартові осі координат.
а)
![]() ;
;
б)
![]() ;
;
в)
![]() ;
;
г)
![]() ;
;
д)
![]() .
.
4.1.3.29 Зміна кількості руху механічної системи зумовлена силами, що діють на систему.
а) – “тільки внутрішніми”;
б) – “тільки зовнішніми”;
в) – “зовнішніми і внутрішніми”;
г) – “пасивними”;
д) – “пасивними і внутрішніми”.
4.1.3.30
Якщо
головний вектор зовнішніх сил, що діють
на систему, дорівнює нулеві
![]() ,
то кількість руху механічної системи
_____________.
,
то кількість руху механічної системи
_____________.
а) – “зміниться”;
б) – “не зміниться”;
в) – “може змінитись”;
г) – “має напрямок протилежний швидкості”;
д) – “має напрямок перпендикулярний швидкості”.
4.1.3.31 Якщо головний вектор зовнішніх сил, що діють на систему _____________, то кількість руху механічної системи не зміниться.
а) – “дорівнює нулеві”;
б) – “не дорівнює нулеві”;
в) – “дорівнює одиниці”;
г) – “дорівнює головному вектору внутрішніх сил”;
д) – “дорівнює головному вектору пасивних сил”.
4.1.3.32 Вкажіть правильні вирази закону збереження кількості руху механічної системи.
а)
Якщо
![]() ,
то
,
то
![]() ;
;
б)
Якщо
![]() ,
то
,
то
![]() ;
;
в)
Якщо
![]() ,
то
,
то
![]() ;
;
г)
Якщо
![]() ,
то
,
то
![]() ;
;
д)
Якщо
![]() ,
то
,
то
![]() .
.
4.1.3.33 Якщо проекція головного вектора зовнішніх сил, що діють на систему, на деяку вісь , то проекція кількості руху системи на дану вісь не зміниться.
а) – “дорівнює одиниці”;
б) – “дорівнює нулеві”;
в) – “не дорівнює нулеві”;
г) – “дорівнює проекції головного вектора пасивних сил на цю вісь”;
д) – “дорівнює проекції головного вектора внутрішніх сил на цю вісь”.
4.1.3.34 Якщо проекція головного вектора зовнішніх сил, що діють на систему, на деяку вісь дорівнює нулеві, то проекція кількості руху системи на дану вісь ___________.
а) – “може змінитись”;
б) – “зміниться”;
в) – “не зміниться”;
г) – “дорівнює одиниці”;
д) – “має протилежний напрямок цій осі”.
4.1.3.35 Вкажіть правильні вирази закону збереження кількості руху механічної системи по осі абсцис.
а)
Якщо
![]() ,
то
,
то
![]() ;
;
б)
Якщо
![]() ,
то
,
то
![]() ;
;
в).
Якщо
![]() ,
то
,
то
![]() ;
;
г)
Якщо
![]() ,
то
,
то
![]() ;
;
д)
Якщо
![]() ,
то
,
то
![]() .
.