

§34. Уравнивание неравноточных измерений параметрическим способом
Уравнивание неравноточных измерений выполняется под условием [ρυυ]= VTPV = min, где pi - веса измерений, а Р - диагональная матрица,
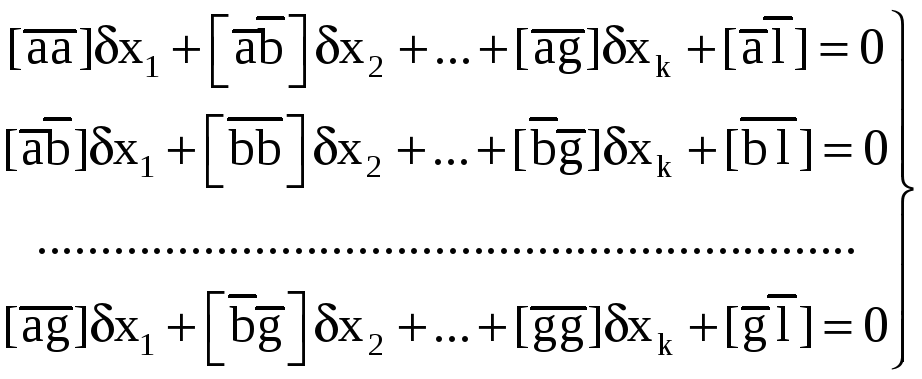
Вопрос установления весов pi был нами рассмотрен в § 24. Исходная система связи и уравнения поправок составляются так же, как и в случае равноточных измерений, но в отличие от него система нормальных уравнений имеет вид
 (3.71)
(3.71)
где алгоритмы
![]()
![]()
…………………………………….
![]()
………………………………….
![]()
В матричной форме уравнения (3.71) можно записать в виде
![]() (3.72)
(3.72)
где
![]() (3.73)
(3.73)
![]() (3.74)
(3.74)
Процесс вычислений
при уравнивании неравноточных измерений,
следовательно, отличается от уже
рассмотренного случая лишь схемой
составления нормальных уравнений. При
этом можно поступить двояко: 1) привести
неравноточные измерения к равноточным
путем умножения i-го
уравнения поправок на величину
![]() 2) нормальные уравнения составлять
непосредственно по формулам (3.13) и
(3.14).
2) нормальные уравнения составлять
непосредственно по формулам (3.13) и
(3.14).
В первой схеме (А) будем иметь систему уравнений поправок
![]()
![]()
…………………………………..
![]()
Где
![]()
![]()
![]()
![]()
![]()
и систему нормальных уравнений
совпадающую с
(3.72). Ясно, также, что [ρυυ] = [![]() ].
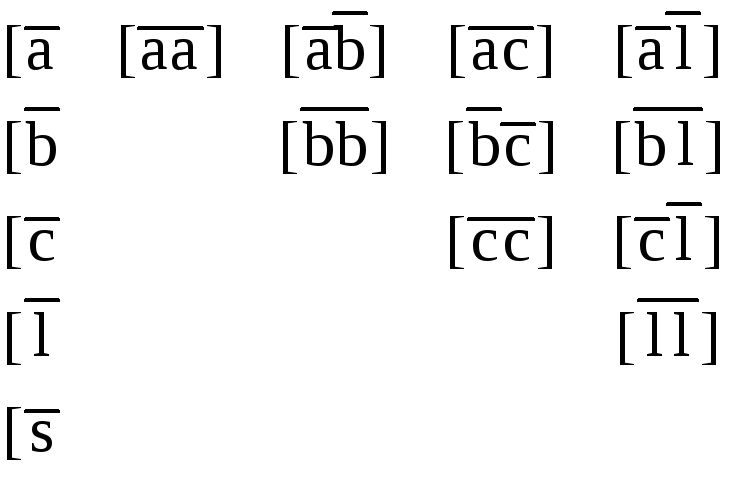
Схема составления системы нормальных
уравнений будет состоять из следующих
двух таблиц (табл. 80, 81). Для простоты
принято k = 3.
].
Схема составления системы нормальных
уравнений будет состоять из следующих
двух таблиц (табл. 80, 81). Для простоты
принято k = 3.
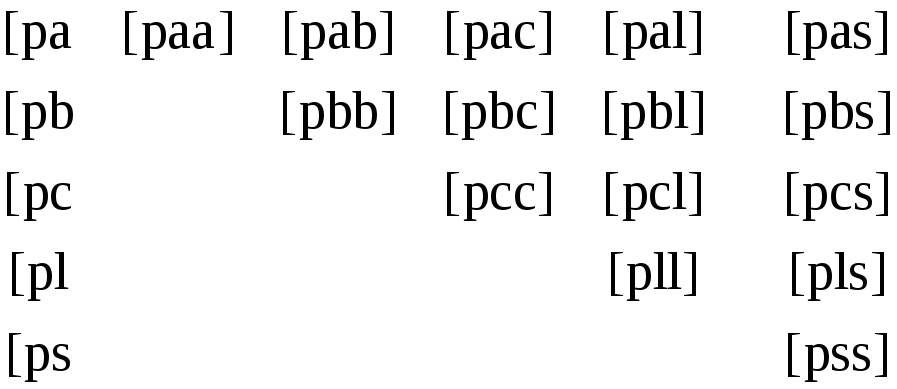
Во второй схеме (В), которую применяют чаще, приходится составлять следующие таблицы (табл. 82 и 83).
|
Таблица 80 |
||||||
|
Номера измерении |
ai bi ci li |
si |
|
|
|
|
|
1 2 |
a1 b1 c1 l1 a2 b2 c2 l2 ………… an bn cn ln |
s1 s2 … s3 |
…
|
……..
|
…
|
… |
|
Таблица 81 |
|
||
|
|
|
|
|
|
|
|
Контроль |
|
|
Таблица 83 |
|
|
|
|
|
|
Контроль |
|
Таблица 82 |
||||||
|
Номера измерений |
ai bi ci li |
si |
pi |
ai pi bi pi ci pi li pi |
sipi |
υi |
|
1 2 … n |
a1 b1 c1 l1 a2 b2 c2 l2 …………….. an bn cn ln |
s1 s2 … sn |
p1 p2 …. pn |
a1 p1 b1 p1 c1 p1 l1 p1 a2 p2 b2 p2 c2 p2 l2 p2 ………………………………….. an pn bn pn cn pn ln pn |
s1p1 snp2 … snpn |
υ1 υ2 … υn |
Решение нормальных уравнений, оценка точности неизвестных и их функций выполняется точно так же, как и в случае равноточных измерений. Следует лишь иметь в виду, что во всех формулах, относящихся к этому процессу, в алгоритмах Гаусса с двумя буквами добавляется буква р.
3.48. Уравнять параметрическим способом нивелирную сеть, представленную на рис. 56 (исходные данные приведены ниже), а результаты измерений - в табл. 84.
|
Таблица 84 |
|||
|
Номера ходов |
Превышение hi, м |
Длина хода Li, км |
|
|
1 |
+6,135 |
33,0 |
1,21 |
|
2 |
+8,343 |
33,9 |
1,17 |
|
3 |
+5,614 |
30,4 |
1,31 |
|
4 |
+ 1,394 |
32,7 |
1,22 |
|
5 |
-6,969 |
31,8 |
1,25 |
|
6 |
-0,930 |
29,9 |
1,34 |
|
7 |
+6,078 |
34,5 |
1,15 |
Марки Высоты исходных
марок, м
А 183,506
В 192,353
С 191,880
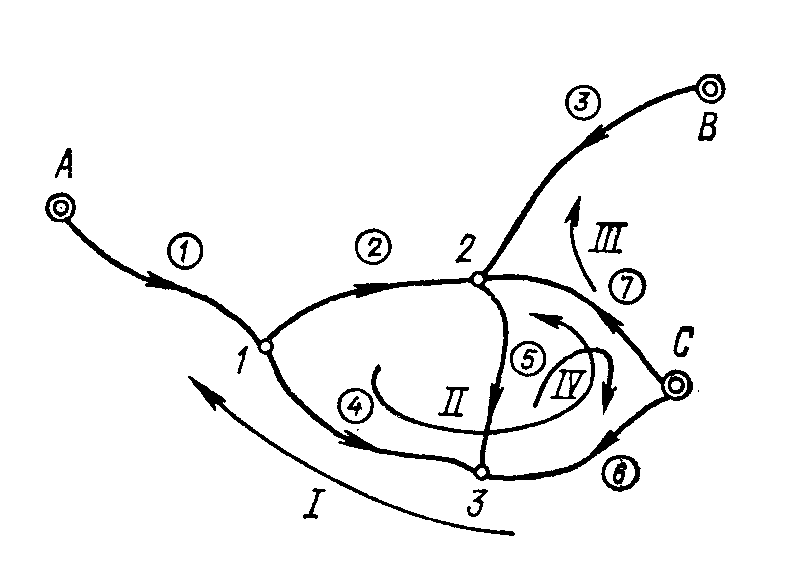
Рис. 56
Решение. Приближенные значения высот реперов получаем так:
![]()
![]()
![]()
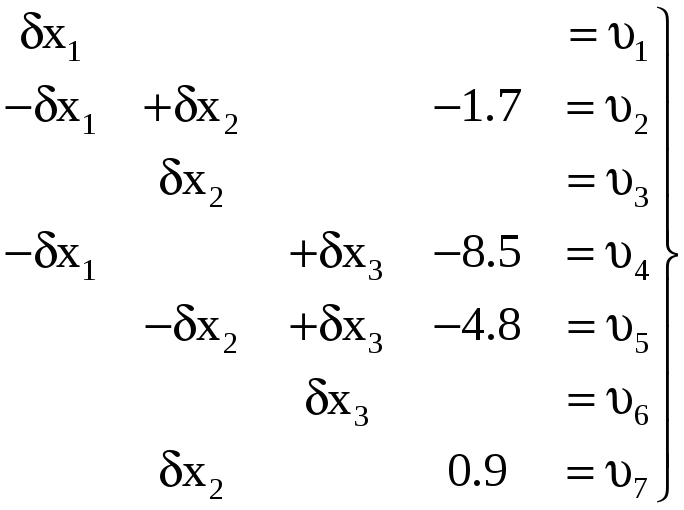
Составляем уравнения поправок:
|
Таблица 85 |
|||||||
|
Номера уравнений |
|
|
|
|
|
|
|
|
1 |
+ 1 |
0 |
0 |
0,0 |
+ 1,0 |
1,21 |
-2,64 |
|
2 |
- 1 |
+ 1 |
0 |
- 1,7 |
- 1,7 |
1,17 |
+0,08 |
|
3 |
0 |
+ 1 |
0 |
0,0 |
+ 1,0 |
1,31 |
-0,85 |
|
4 |
-1 - |
0 |
+ 1 |
-8,5 |
-8,5 |
1,22 |
-2,69 |
|
5 |
0 |
- 1 |
+ 1 |
-4,8 |
-4,8 |
1,25 |
-0,77 |
|
6 |
0 |
0 |
+ 1 |
0,0 |
+ 1,0 |
1,34 |
+3,17 |
|
7 |
0 |
+ 1 |
0 |
+0,9 |
+ 1,9 |
1,15 |
+0,05 |
|
|
- 1 |
+2 |
+3 |
-14,1 |
- 10,1 |
|
|
|
δxj Контроль |
-2,64 0,00 |
-0,85 0,01 |
+3,17 -0,01 |
|
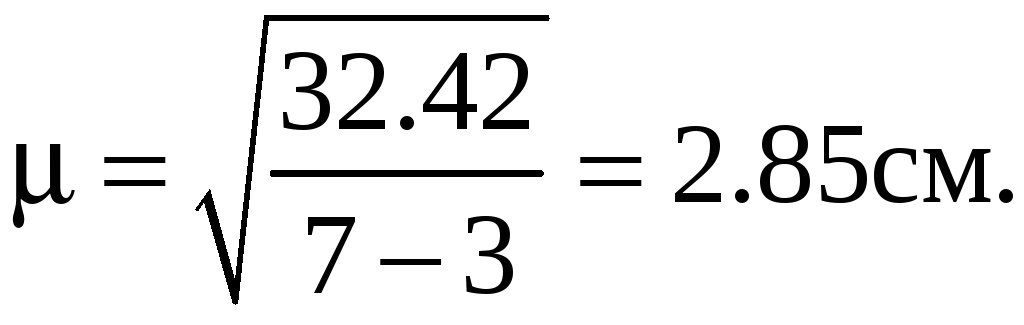
[ρυυ] = 32,42 |
||
|
Таблица 86 |
|||||||||
|
a] |
b] |
с] |
l] |
s] |
Контроль |
F1 |
F2 |
Σ |
SQ |
|
[pa +3,60 [pb [pc [pl [ps |
- 1,17 +4,88
|
-1,22 -1,25 +3,81 |
+12,36 +5,05 -16,37 + 121,9 |
+ 13,57 +7,51 -15,03 + 122,30 +128,35 |
+ 13,57 7,51 - 15,03 122,30 128,35 |
+ 1,00 0 0 |
00 1,00 -1,00 |
+2,21 +3,46 +0,34 1,00 0 |
12,97 6,61 -16,03 |
|
Σ1=[as]-[al]+(f1)1+(f1)2 Σ2=[bs]-[bl]+(f2)1+(f2)2 Σ3=[cs]-[cl]+(f3)1+(f3)2 |
|||||||||
Свободные члены выражены в сантиметрах.
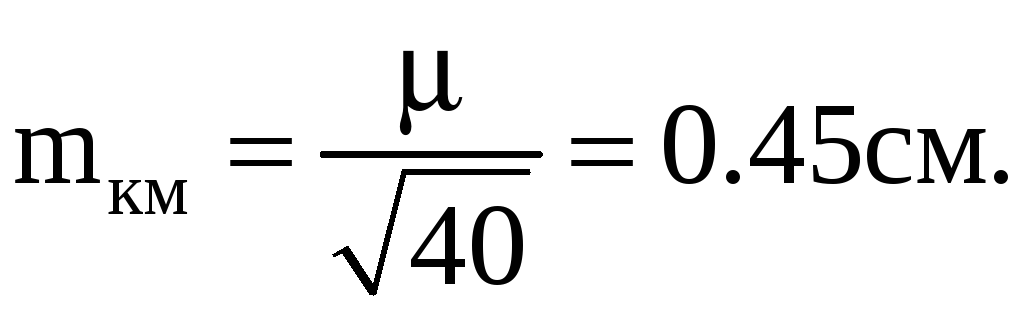
Веса измерений вычисляем по формуле pi= 40/Li.
В табл. 85 и 86 приведены коэффициенты уравнений поправок и нормальных уравнений.
В качестве оцениваемых функций выбраны превышения по ходам 1 и 5. Для первой функции F1 коэффициенты f1 = 1, f2 = 0, f3 = 0, для второй f1 = 0, f2 = 1, f3 = - 1. В столбце Σ табл. 86 два последних числа равны соответственно [f]1 = 1 и [f]2 = 0.
Решение системы нормальных уравнении приведено в табл. 87.
В результате проведенного решения получены следующие значения неизвестных:
X1 = 189,641 м - 2,64 см = 189,615 м;
Х2= 197,967 м - 0,85 см = 197,953 м;
х3= 190,950 м + 3,17 см = 190,981 м.
Средние квадратические ошибки единицы веса и на 1 км хода равны:
Вес последнего неизвестного равен
Вес первого неизвестного получен дважды
Вес предпоследнего неизвестного
Средние квадратические ошибки:
![]()
![]()
![]()
После введения поправок в измеренные величины получим
![]()
![]()
![]()
![]()
![]()
![]()
![]()
|
Таблица 87 |
|||||||||||||||
|
δx1 |
δx2 |
δx3 |
l |
S |
Контроль 1 |
Q1 |
Q2 |
Q3 |
Qs |
Контроль 2 |
F1 |
F2 |
Σ |
Контроль 3 |
|
|
+3,60 (0,2778) (-1) |
- 1,17 +0,325 |
-1,22 +0,339 |
+ 12,36 -3,433 |
+ 13,57 -3,769 |
+ 13,57 -3,769 |
- 1,00 +0,278 |
0 0 |
0 0 |
+12,57 -3,492 |
12,57 -3,491 |
+ 1,00 -0,278 |
0 0 |
+2,21 -0,614 |
+2,21 -0,614 |
|
|
(0,2222) |
4,50 (-1) |
-1,65 +0,366 |
+9,071 +2,015 |
11,92 -2,649 |
+ 11,92 -2,649 |
-0,32 +0,072 |
- 1,00 +0,222 |
0 0 |
+ 10,60 -2,355 |
+ 10,60 -2,355 |
+0,32 -0,072 |
+ 1,00 -0,222 |
+4,18 -0,929 |
+4,17 -0,928 |
|
|
(0,3571) |
|
+2,80 |
-8,86 +3,171 |
-6,07 +2,172 |
-6,06 +2,171 |
-0,46 +0,164 |
-0,37 +0,131 |
- 1,06 +0,357 |
-7,89 +2,818 |
-7,90 +2,823 |
+0,46 -0,164 |
-0,63 +0,227 |
+2,62 -0,936 |
+2,63 -0,937 |
|
|
|
|
|
32,44 |
32,44 32,44 |
|
|
|
|
|
|
+0,031
-0,366 |
-0,345
-0,333 |
-0,345
-0,335 |
||
|
δx1 |
δx2 |
δx3 |
|
||||||||||||
|
-2,636 -3,638 |
-0,855 - 1,855 |
+3,171 +2,171 |
|
||||||||||||
|
+ 1,002 |
1,000 |
1,000 |
|
||||||||||||
|
Весовые коэффициенты |
|
||||||||||||||
|
+0,376 +0,132 +0,164 |
+0,132 +0,270 +0,131 |
+0,164 +0,131 +0,358 |
|
||||||||||||
Окончательным
контролем правильности решения задачи
является выполнение равенства
![]() для
каждого хода сети.
для
каждого хода сети.
Способ узлов проф. В. В. Попова для составления нормальных уравнений
Для случая уравнивания нивелирных сетей и углов в сети полигонометрии проф. В. В. Попов предложил следующие правила составления нормальных уравнений с помощью чертежа сети:
а) квадратичные коэффициенты нормальных уравнений в строке j равны сумме весов ходов, сходящихся в узле с тем же номером j;
б) неквадратичные коэффициенты, расположенные в строке i и столбце h, равны отрицательному весу хода, соединяющего узлы с номерами j и h;
в) свободные члены нормальных уравнений получаются суммированием величин ±Pili тех ходов, которые сходятся в узле j, причем если узел является конечной точкой хода, то ставится знак «+», а если начальной, то «-».
Например, для нивелирной сети (см. рис. 56) нормальные уравнения будут
![]()
![]()
![]()
а свободные члены
![]()
![]()
![]()
Указанные правила тождественны следующим формулам составления матрицы R системы нормальных уравнений (3.72) ее диагональные элементы
![]() (3.75)
(3.75)
(запись i![]() j
означает здесь
принадлежность i-го
хода j-му
узлу), а недиагональные
j
означает здесь
принадлежность i-го
хода j-му
узлу), а недиагональные
![]() (3.76)
(3.76)
(знак суммы предусматривает случай, когда узлы j и k соединены несколькими ходами).
Вектор свободных членов b имеет элементы
![]() (3.77)
(3.77)
3.49. Составить по способу В. В. Попова систему нормальных уравнений в задаче 3.48.
3.50. Выполнить параметрическим способом уравнивание сети триангуляции (рис. 57), если . в ней измерены дирекционные углы
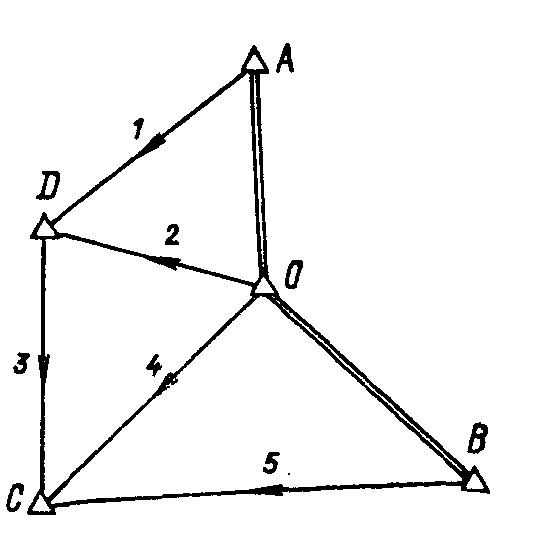
Рис. 57
Номера дирекционных Измеренные значения
углов
1 229°30'17,9'
2 294 06 17.4
3 183 34 12,7
4 238 54 00,7
5 281 56 01,2,
матрица весов которых
Координаты исходных пунктов взять из задачи 3.36. Исходные дирекционные углы
αOA =0°; αOB = 135°40’19,5".
Приближенные значения координат определяемых пунктов примем равными приведенным ниже:
Пункт Ρ x(0) y(0)
D 623,360 - 1393,272
С - 897,701 - 1488,183
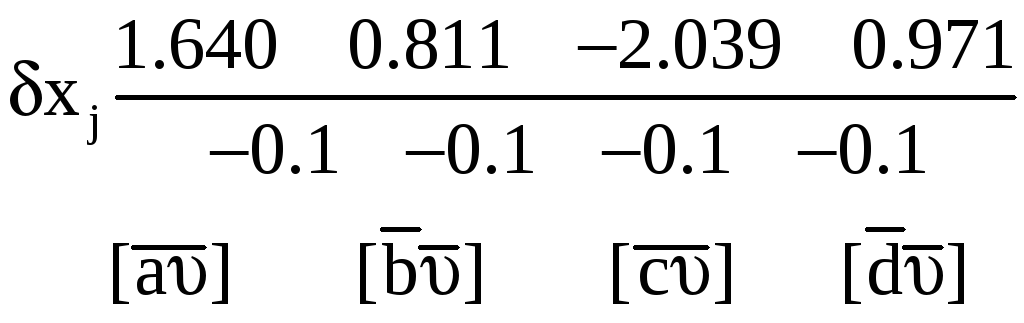
Решение. Эта задача отличается от решенной ранее задачи 3.37 лишь тем, что теперь дирекционные углы неравноточны**. Таблицы коэффициентов уравнений поправок и составления нормальных уравнений имеют вид, приведенный в табл. 88, 89.
Решение нормальных
уравнений и получение матрицы весовых
коэффициентов представлено в табл. 90,
а вычисление поправок
![]() ,
,![]() с контролем
с контролем
![]() и
и
![]() -
в табл. 88.
-
в табл. 88.
Уравненные значения координат и уравненных дирекционных углов приведены ниже.
Пункт F х(р) у(0)
D 623,376 -1393,264
С -897,721 1488,173
Номера дирекционных углов Уравненные дирекционные
1 229°30'18,6"
2 294 06 17,2
3 183 34 13,3
4 238 54 00,2
5 281 56 02,6
При уравнивании этого построения имеем всего одно избыточное измерение, поэтому вычислить ошибку единицы веса μ не представляется возможным. Однако учитывая, что в качестве измеренных углов здесь приняты предварительно уравненные углы из задачи 3.36, можно применить формулу
![]()
где через
![]() - обозначены поправки углов, уравненных
в задаче 3.36.
- обозначены поправки углов, уравненных
в задаче 3.36.
|
Таблица 88 |
||||||||||||||||
|
ai |
bi |
ci |
di |
li |
si |
|
|
|
|
|
|
|
Контроль |
|
|
|
|
0,858 |
-0,731 |
0 |
0 |
-0,1 |
0,027 |
1,414 |
1,213 |
-1,034 |
0 |
0 |
-0,141 |
0,038 |
0,038 |
1,01 |
0,71 |
|
|
1,234 |
0,552 |
0 |
0 |
-2,7 |
-0,914 |
2,000 |
2,468 |
1,104 |
0 |
0 |
-5,400 |
-a, 828 |
-1,828 |
-0,46 |
-0,23 |
|
|
-0,084 |
1,350 |
0,084 |
- 1,350 |
1,1 |
1,100 |
1,414 |
-0,119 |
1,909 |
0,119 |
-1,909 |
1,556 |
1..556 |
1,556 |
0,81 |
0,57 |
|
|
|
|
1,018 |
-0,614 |
2,2 |
2,604 |
2,000 |
|
|
2,038 |
-1,228 |
4,400 |
5,208 |
5,210 |
-0,95 |
-0,48 |
|
|
|
|
0,662 |
0,140 |
2,6 |
3,402 |
1,414 |
|
|
0,936 |
0,198 |
3,676 |
4,810 |
4,808 |
1,96 |
1,39 |
|
|
|
Коэффициенты увеличены в 10 раз |
|
||||||||||||||
|
Таблица 89 |
|||||||
|
|
|
|
|
|
|
|
Контроль |
|
|
7,577 |
1,243 |
-0,014 |
0,227 |
- 13,683 |
-4,650 |
-4,650 |
|
|
|
5,932 |
0,227 |
-3,644 |
|
0,913 |
0,913 |
|
|
|
|
5,043 |
-2,544 |
12,593 |
15,301 |
15,305 |
|
|
|
|
|
5,191 |
-7,646 |
-8,414 |
-8,416 |
|
|
|
|
|
|
64,474 |
52,884 |
52,893 |
|
|
|
|
|
|
|
56,024 |
56,034 |
|
Таблица 90 |
|||||||
|
Вспомогательные величины |
|
|
|
|
l |
s |
Контроль |
|
(0,1320) |
7,577 (-1) |
1,243 -0,1640 |
-0,014 0,0018 |
0,227 -0,0300 |
-13,683 1,8056 |
-4,650 0,6137 |
-4,650 0,6134 |
|
(0,1746)
|
5,728 -1 |
■0,229 -0,0400 |
-3,681 0,6426 |
-0,601 0,1049 |
1,676 -0,2926 |
1,675 -0,2925 |
|
|
|
(0,1986) |
5,034 -1 |
-2,296 0,4760 |
12,592 -2,5014 |
15,230 -3,0254 |
15,230 -3,0254 |
|
|
|
|
(0,5965)
|
1,678 (-1) |
-1,628 0,9713 |
0,048 -0,0286 |
0,048 -0,0287 |
|
|
|
1,6398
0,6401 |
0,8106
-0,1894 |
-2,0391
-3,0390 |
0,9713
-0,0286 |
6,626
|
6,623
6,611 |
|
|
0,9997
|
1,0000 |
0,9999 |
0,9999 |
10-4 |
|
||
|
1,000 1,000 0,999 1,001 |
0,1470 - 0,0776 -0,0356 -0,0784 |
-0,0776 0,4069 0,1691 0,3720 |
-0,0356 0,1691 0,3337 0,2839 |
-0,0784 0,3720 0,2839 0,5965 |
|||
Тогда
![]()
Оценка точности уравненных координат выполняется по формулам
![]()
![]()
![]()
![]()
а их функций - точно так же, как и в задачах 3.36-3.38, а именно:


Поэтому
![]()
![]()
3.J51. Для условий задачи 3.50 составить нормальные уравнения, пользуясь схемой А (не приводя измерения к равноточным). Сделать выводы о преимуществе схемы А или В с точки зрения объема и точности вычислений.
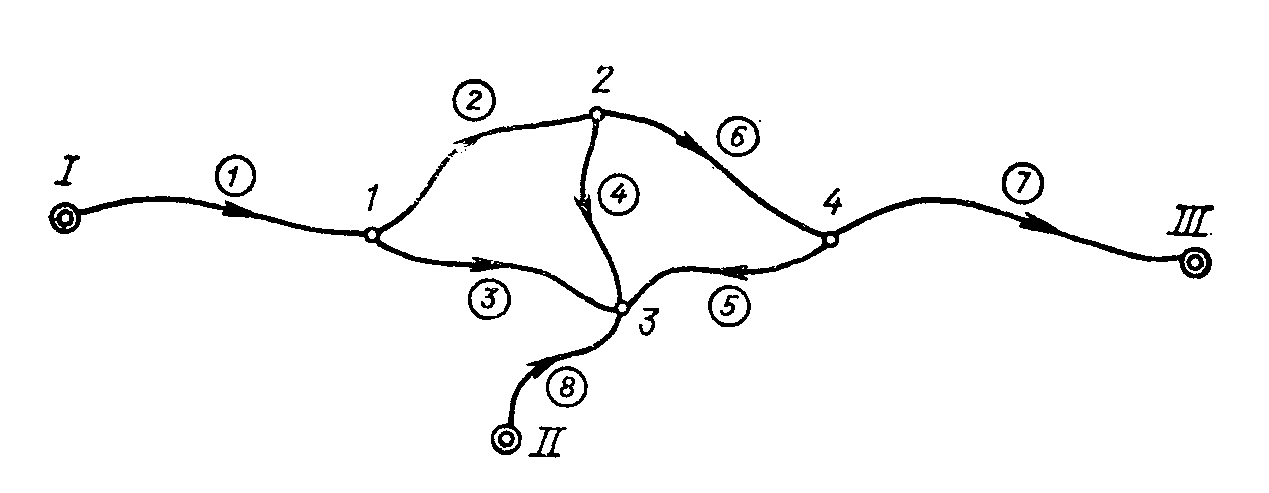
Рис. 58
3.52. Выполнить уравнивание нивелирной сети, изображенной на рис. 58. Оценить точность всех узловых реперов (матрицу весовых коэффициентов
получить по способу Ганзена) и уравненного превышения hi. Обратный вес этой функции вычислить по формуле (3.49) и в дополнительном столбце схемы Гаусса. Исходные данные приведены ниже, а измеренные превышения и длины ходов даны в табл. 91. Нормальные уравнения составить дважды: по схеме В и по способу узлов проф. В. В. Попова.
Номера опорных реперов Высоты опорных реперов, м
I 188,452
II 188,838
III 186,298
3.53. Выполнить предварительное уравнивание углов в полигонометрической сети (рис. 59). Оценить точность дирекционных углов узловых направлений, совпадающих со сторонами 1-30 и 2232. Суммы измеренных левых углов в ходах и исходные дирекционные углы на рис. 59 [3].
Решение. Суммы
измеренных углов в каждом ходе принимаем
в качестве измеренных величин (как и
превышения ходов в нивелирной сети).
Веса ходов принимаем равными
![]() ,
где
,
где
![]() - число измеренных углов в каждом ходе.
Предполагается, что на узловых точках
углы измерены отдельно друг от друга.
Далее вычисляем приближенные значения
дирекционных углов сторон 1-30 и 2-32 по
ходам 1 и 3:
- число измеренных углов в каждом ходе.
Предполагается, что на узловых точках
углы измерены отдельно друг от друга.
Далее вычисляем приближенные значения
дирекционных углов сторон 1-30 и 2-32 по
ходам 1 и 3:
![]() =
196°08'42,3',
=
196°08'42,3',
![]() = 162°38'47,1".
= 162°38'47,1".
|
Таблица 91 |
|||||||||||
|
|
Превышения, м
|
Длина хода, км |
|||||||||
|
Варианты |
|||||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
||
|
1 |
+2,214+0,001i |
12,8 |
13,4 |
14,0 |
8,0 |
11,1 |
11,8 |
13,2 |
15,1 |
16,6 |
17,5 |
|
2 |
+1,566 |
14,2 |
14,8 |
15,5 |
8,9 |
12,3 |
13,1 |
14,6 |
16,7 |
18,3 |
19,4 |
|
3 |
-0,302 |
8,7 |
9,1 |
9,5 |
5,4 |
7,6 |
8,0 |
8,9 |
10,2 |
11,2 |
11,8 |
|
4 |
-1,881 |
12,4 |
13,0 |
13,6 |
7,7 |
10,7 |
10,4 |
12,8 |
14,6 |
16,0 |
16,9 |
|
5 |
+0,915 |
5,8 |
6,1 |
6,4 |
3,6 |
5,1 |
5,4 |
6,0 |
6,9 |
7,5 |
7,9 |
|
6 |
-2,814 |
5,1 |
5,3 |
5,6 |
3,2 |
4,4 |
4,8 |
5,2 |
6,0 |
6,5 |
6,9 |
|
7 |
-3,137 |
7,8 |
8,3 |
8,6 |
4,9 |
6,8 |
7,2 |
8,1 |
9,2 |
10,1 |
10s6 |
|
8 |
+ 1,517+0,001i |
10,1 |
10,7 |
11,1 |
6,3 |
8,8 |
9,4 |
10,4 |
12,0 |
13,1 |
13,8 |
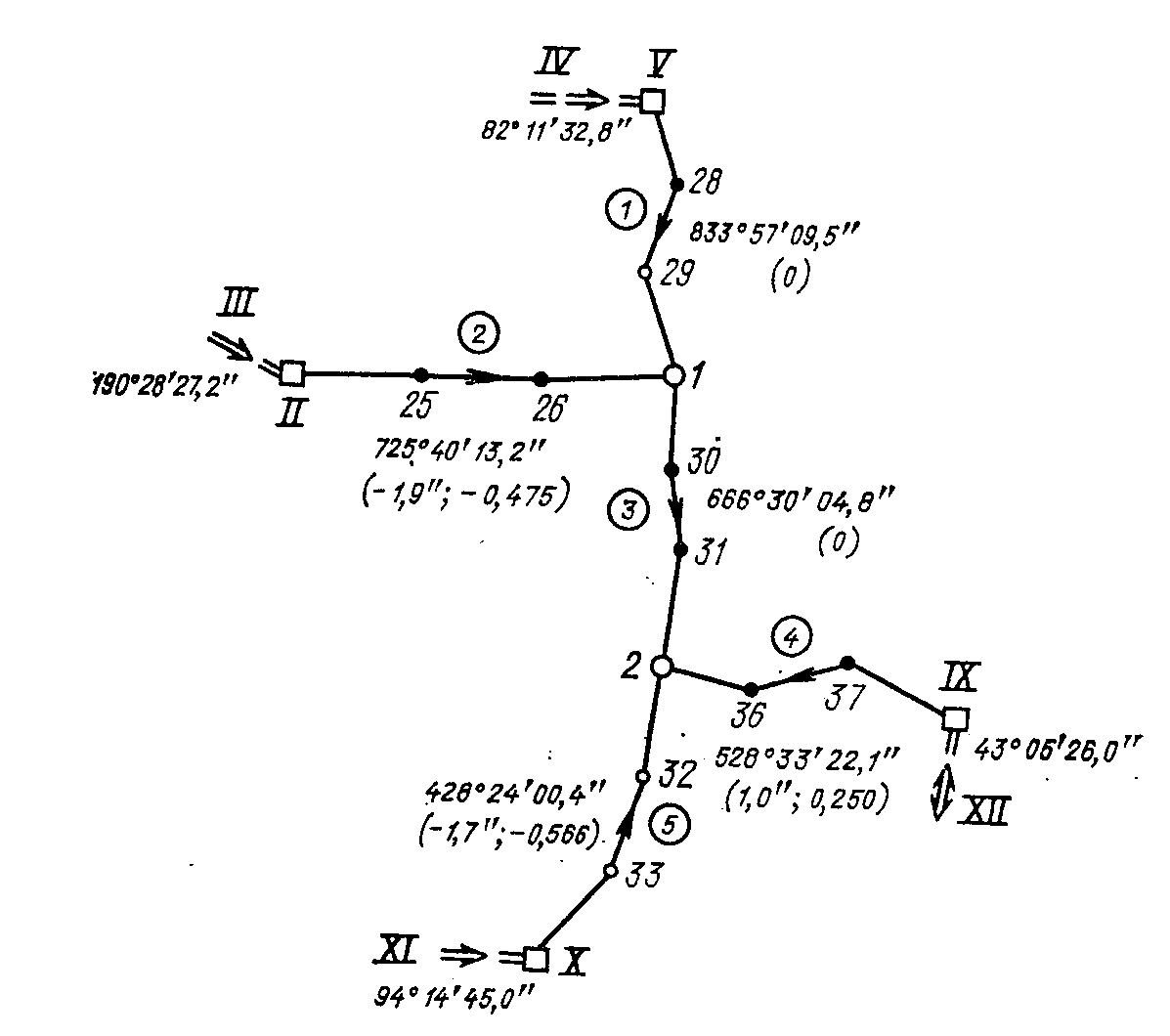
Рис. 59
Свободные члены уравнений поправок (фактически это невязки ходов, взятые с обратным знаком) вычисляем по формуле

где k -
такое число, при котором выполняется
неравенство![]() Ясно
что по
ходам 1 и 3 невязки равны 0. Нормальные
уравнения составляем по способу узлов
проф. В. В. Попова по формулам (3.75), (3.76) и
(3.77) без составления уравнения поправок,
так как коэффициенты перед неизвестными
δα1
и δα2
как и в нивелирных сетях, равны ± 1 или
0. В общем виде нормальные уравнения
будут
Ясно
что по
ходам 1 и 3 невязки равны 0. Нормальные
уравнения составляем по способу узлов
проф. В. В. Попова по формулам (3.75), (3.76) и
(3.77) без составления уравнения поправок,
так как коэффициенты перед неизвестными
δα1
и δα2
как и в нивелирных сетях, равны ± 1 или
0. В общем виде нормальные уравнения
будут
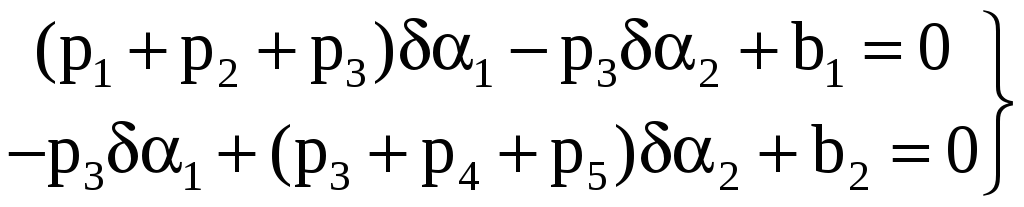
где свободные члены
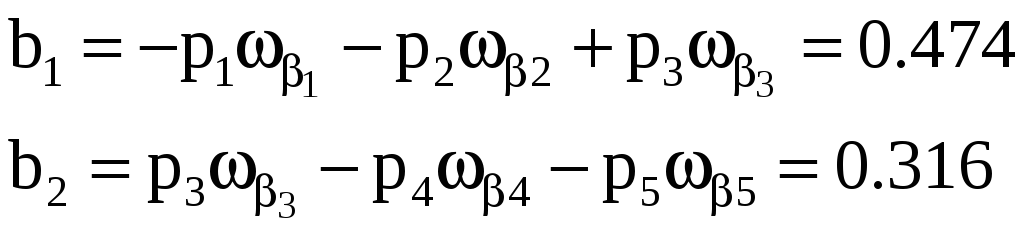
Величины
![]() и
и
![]() приведены в скобках на рис. 59. В результате
вычислений получаем систему
приведены в скобках на рис. 59. В результате
вычислений получаем систему
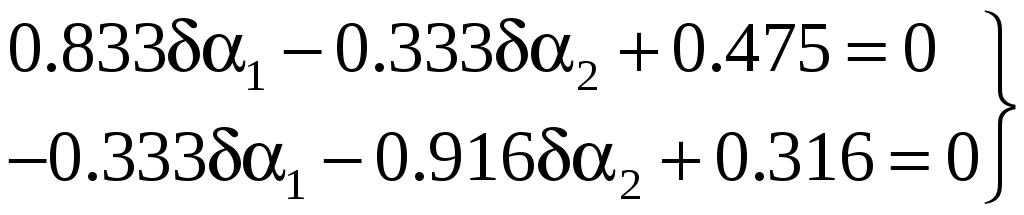
Решая ее путем обращения матрицы, находим
Далее для углов каждого хода вычисляем величины
![]()
(![]()
![]()
![]()
![]()
![]() )
)
представляющие собой поправки в суммы углов ходов. Контроль вычислений вытекает из формулы [paυ] = [pbυ] = ... = 0 и приобретает вид
Соответственно для узлов 1 я 2 получаем
1) 0,207 - 0,268 + 0,060 = - 0,001,
2)- 0,060 + 0,411 - 0,351 = 0.
Поправки в углы в каждом ходе вычисляем по формуле
(здесь они не приводятся).
Далее по известным формулам вычисляем дирекционные углы всех сторон. Для оценки точности вычислим величину

Средняя квадратическая ошибка измерения одного угла
 а ошибка
а ошибка
уравненных дирекционных углов
![]()
![]()
Коэффициент
корреляции между ними
Если на узлах углы измерены способом круговых приемов, то им следует приписать вес, равный 2, а всем остальным углам - веса, равные 1. Тогда вес суммы углов хода с одним узлом найдем, исходя из формулы

и вес
где, как и ранее, n' - число вершин хода, включая узловую точку. Для хода
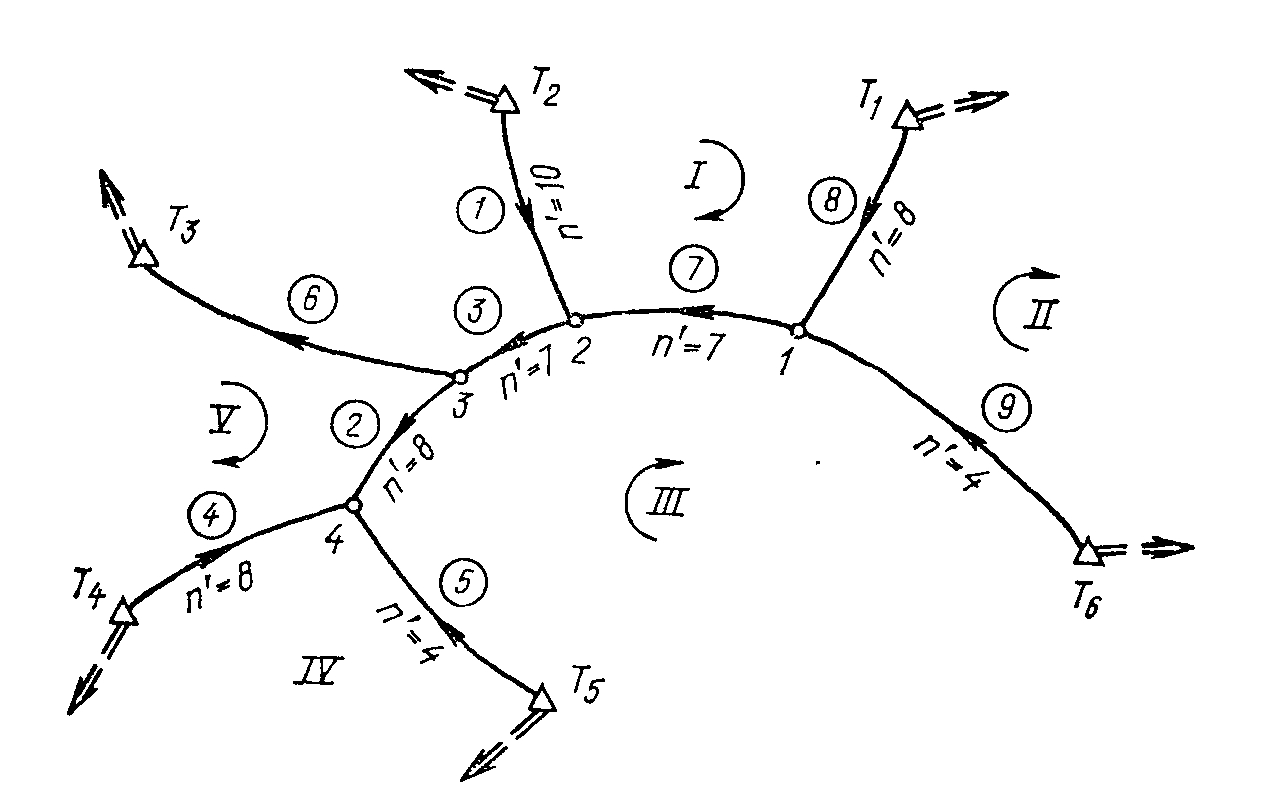
Рис. 60
«от узла к узлу»
 .
Все вычисления аналогичны выполненным
ранее стой разницей, что поправки углов
на узловых точках вычисляются по формуле
.
Все вычисления аналогичны выполненным
ранее стой разницей, что поправки углов
на узловых точках вычисляются по формуле
В этом случае получим матрицы
3.54. Составить матрицу коэффициентов нормальных уравнений, возникающих при предварительном уравнивании полигонометрической сети (рис. 60), оценить точность уравненных дирекционных углов узловых направлений и вычислить коэффициенты корреляции между ними, если: 1) углы на узлах измерены отдельно друг от друга; 2) измерены способом круговых приемов.