

Задание на подготовку к работе
1. Повторите основные положения раздела ТАУ "Метод фазовой плоскости".
2. Запишите в форме переменных состояния уравнения движения линейной системы второго порядка. Коэффициенты уравнений выберите таким образом, чтобы фазовые траектории системы соответствовали виду, указанному в варианте задания (табл.4.2).
3. Запишите в форме переменных состояния уравнения движения
исследуемой НСАУ. Для каждого варианта задания структурная схема НСАУ и параметры звеньев приведены в табл.4.2.
4. Проведите качественный анализ вида фазовых траекторий, соответствующих описанию системы, полученному либо для каждого из линейных участков на характеристике нелинейного звена, либо для всех значений переключающей функции.
5. Получите уравнения линий переключения на фазовой плоскости в соответствии с характеристикой нелинейного эвена.
6. Качественно постройте и проанализируйте фазовый портрет НСАУ, заданной номером варианта.
7. Проанализируйте, каким образом заданные в варианте изменения структуры и параметров системы повлияют на вид уравнений движения, положение линий переключения и характер фазовых траекторий.
Методические указания по выполнению работы
В первой части работы исследуется динамика невозмущенного движения линейных САУ второго порядка (ненулевые начальные условия при отсутствии задающего воздействия). Уравнение системы имеет вид:
Y” + a1Y’ + a0Y = 0,
или в форме переменных состояния:
Y1’ = Y2
Y2’ = -a1Y2 – a0Y1
Уравнение фазовых траекторий в этом случае имеет вид:
dY2/dY1 = -a1 – a0Y1/Y2
Решение Y2 =f(Y1) содержит одну произвольную постоянную, величина которой зависит от начальных условий. Совокупность кривых Y2 = f(Y1) для всех возможных значений этой постоянной представляет собой все возможные фазовые траектории, а значит и все возможные виды переходных процессов в рассматриваемой САУ.
Вид фазовых траекторий зависит от корней характеристического уравнения системы
P1,2
= -a1/2
±

Возможны шесть вариантов решений:
1) Корни чисто мнимые при a1=O, a0>O. Тогда Y1=ωAcos(ωt+b), ω = a0. Амплитуда А и начальная фаза b зависят от выбора начальных условий.
Фазовые траектории представляют собой концентрические эллипсы с особой точкой типа "центр" в начале координат.
2) Корни комплексные и имеют отрицательные вещественные части при a12<4a0, a1>0, a0>0. Общий вид решения
Y1 = A exp(-αt) sin(ωt + b), α=a1/2, ω=a0-a12/2,
Y2 = A exp(-αt)(-αsin(ωt+b) + αcos(ωt+b). Фазовые траектории имеют вид спиралей. Начало координат является точкой устойчивого равновесия и носит название устойчивого фокуса.
3) Корни комплексные и имеют положительные вещественные части при а12<4ao, a1<0, ао>0. Решения для фазовых переменных имеют тот же вид, что и в предыдущем случае, но фазовые траектории имеют вид раскручивающихся спиралей. Точка начала координат называется неустойчивым фокусом.
4) Корни вещественные отрицательные при a12>4ao, a1>0, ао>О. Фазовые переменные: Y1 = с1 exp(-p1t) + C2exp(-p1t),
Y2 = -P1c1exp(-p1t) - P2C2exp(-p2t).
Это решение соответствует затухающему апериодическому переходному процессу. Фазовые траектории представляют собой кривые параболического типа и монотонные кривые, имеющие общую касательную в особой точке. Начало координат является в этом случае точкой устойчивого равновесия (устойчивый узел).
5) Корни вещественные положительные при a12>4ao, a1<0, ао>О. Имеет место расходящийся апериодический процесс и точка равновесия - начало координат - в данном случае является особой точкой типа неустойчивый увел.
6) Корни вещественные и имеют разные знаки при а12>4ao, a1<0, ао<О. Начало координат является особой точкой типа седло.
При исследовании нелинейной САУ в каждом варианте задается структурная схема системы, а также тип и параметры нелинейного звена. При подготовке к занятию требуется определить уравнения фазовых траекторий, описывающие движение системы. Уравнения движения должны быть получены либо для каждого линейного участка на характеристике нелинейного звена (варианты 1,3,4,5,7,8), либо для всех значений переключающей функции (варианты 2,6). Ввод в ПК уравнений движения линейной и нелинейной САУ в переменных состояния осуществляется в форме:
dY1/dt = k10 + k11Y1 + k12Y2
dY2/dt = k20 + k21Y1 + k22Y2 (4.1)
где K10,K11,K12,K20,K21,K22 - вводимые коэффициенты уравнений.
Для анализа нелинейной САУ в ПК вводятся уравнения линий переключения, разделяющих фазовую плоскость на области, в пределах каждой из которых движение системы описывается линейными уравнениями. Линии переключения задаются прямыми с точкой Y10 на оси. Y1 и тангенсом угла наклона относительно оси Y2 равным к:
Y1 = Y10 + kY2. (4.2)
В зависимости от типа исследуемой системы возможны два различных варианта задания линий переключения. Если исследуется НСАУ, содержащая нелинейное звено с кусочно-линейной характеристикой (в частном случае - с характеристикой релейного типа), то параметры линий переключения вводятся последовательно, начиная с крайней левой линии в области положительных значений Y2. Затем вводятся параметры левой линии в области отрицательных значений Y2.После этого задаются параметры следующих по возрастанию Y2 пар линий. В случае однозначной нелинейной характеристики линии попарно совпадают, а при наличии гистерезиса каждая пара прямых имеет смещение относительно друг друга. Если в НСАУ отсутствует обратная корректирующая связь, охватывающая нелинейное звено, то линии переключения располагаются параллельно оси Y2. При наличии обратной связи линии переключения имеют наклон. Следует помнить, что ввод параметров линий переключения производится строго попарно, в том числе и для случая, когда линии попарно совпадают.
При исследовании системы с переменной структурой (СПС, варианты 2,6) линии переключения задаются отрезками, лежащими в верхней и нижней полуплоскости и имеющими начало в точке начала координат. Установлена следующая последовательность задания линий: первоначально вводятся параметры первой слева линии, лежащей в верхней полуплоскости, затем задается левая линия в нижней полуплоскости, потом вводятся параметры второй слева линии в верхней полуплоскости и аналогично расположенной линии в нижней полуплоскости.
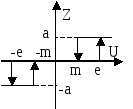
На рис.4.1 показан порядок ввода параметров линий переключения для случая нелинейного звена с характеристикой трехпозиционного реле с гистерезисом. В этом случае количество областей, рассматриваемых на фазовой плоскости, равно 3, а число линий переключения - 4.

линия 1: Y10 = -m ; k=0;
линия 2: Y10 = -e ; k=0;
линия 3: Y10 = e ; k=0;
линия 4: Y10 = m ; k=0.
Рис.4.1
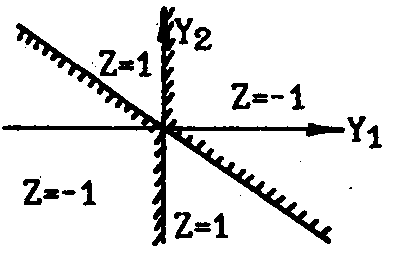
Для варианта исследования СПС переключающая функция Z(Y1,Y2) синтезируется на основе соотношения Z= -Y1sign(Y1)sign(A1Y1+A2Y2). В этом случае линии переключения должны быть заданы следующими прямыми:
линия 1: Y10= 0; k=-A2/A1;
линия 2: Y10= 0; k=0;
линия 3: Y10= 0; k=0;
линия 4: Y10= 0; k=-A2/A1.
При выполнении работы предполагается следующая последовательность задания параметров системы. Первоначально производится выбор типа системы. Предусмотрена возможность исследования линейных и нелинейных САУ. Затем устанавливаются параметры прямо- угольного окна на фазовой плоскости, в пределах которого в дальнейшем проводятся построения фазовых траекторий.
При исследовании линейной структуры следующий шаг состоит в задании коэффициентов уравнений движения. Если же предполагается исследовать нелинейную систему, то прежде следует установить число областей на фазовой плоскости, необходимых для полного отображения фазовых траекторий при произвольном выборе начальных условий.
Вопрос о количестве областей решается либо исходя из вида характеристики нелинейного звена, либо на основании анализа переключающей функции. В общем случае число областей совпадает с количеством кусочно-линейных участков (в том числе участков с постоянным значением сигнала) на характеристике нелинейного звена. Для систем с переменной структурой в соответствии с функцией переключения производится разделение плоскости на области и затем определяется общее число областей, которые пересекаются горизонталью Y2<>0 при изменении Y1 во всем диапазоне значений. После того, как определено число областей, производится установка параметров линий переключения в порядке, описанном выше. Далее вводятся коэффициенты параметрических уравнений, описывающих движение системы в каждой из областей, после чего можно перейти к исследованию системы на фазовой плоскости.
Для построения фазового портрета , дающего полное представление о характере движения системы, нужно последовательно задавать разные начальные условия (Y10,Y20) и отобразить в пределах установленного окна семейство фазовых траекторий. При этом рекомендуется координаты начальных точек выбирать по периметру окна. Следует также помнить, что за пределами окна просмотра фазовые траектории не отображаются.
В соответствии с программой исследований в процессе работы последовательно анализируются фазовые портреты линейных САУ, затем исходная нелинейная система и влияние изменения параметров системы на характер динамических режимов. После завершения каждого этапа исследования производится переход в режим установки параметров системы и, при необходимости, изменяется тип исследуемой САУ, вносятся изменения в уравнения линий переключения и в параметрические уравнения движения системы, а также переопределяется расположение и размеры окна просмотра на фазовой плоскости.
Методические данные для проведения исследований.
Варианты структурных схем НСАУ (рис. 4.2 - 4.5):
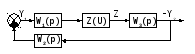
Вариант S1

W1(p=k1); W2(p)=k2/p; W3(p)=k3/(l+pT3); W4(p)=k4.
Рис. 4.2
Вариант S2

W1(p)=k1/p; W2(p)=k2/p; Z(Y1,Y2)=-Y1Sign(Y1)sign(A1Y1+A2Y2).
Рис.4.3
Вариант S3

W1(p)=k1/p; W2(p)=k2/p; W3(p)=k3.
Рис.4.4
Вариант S4
W1(p)=k1; W2(p)=k2/p; W3(p)= k3/(l+pT3).
Рис.4.5
Таблица 4.1 Варианты характеристик нелинейных блоков
|
номер вар. |
тип нелинейного звена |
вид характеристики нелинейного звена |
|
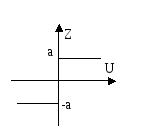
N1 |
Двухпозиционное идеальное реле |
|
|
|
|
|
|
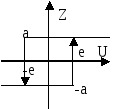
N2 |
Двухпозиционное реле с гистерезисом |
|
|
|
|
|
|
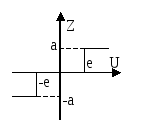
N3 |
Трехпозиционное идеальное реле |
|
|
|
|
|
|
N4 |
Трехпозиционное реле с гистерезисом |
|
|
N5 |
Переключающее устройство в системе с переменной структурой |
|
|
|
|
Варианты исходных данных
|
Номер варианта задания-
|
Тип особой точки фазового портрета
|
Тип и параметры НСАУ |
||
|
тип САР |
тип HЭ |
параметры линейных звеньев |
||
|
1 |
Эллипс; неустойчивый узел; |
S1 |
N4 а=0.2 е=5.0 m=2.5 |
K1=10; к2=1.О; к3=5.О; к4=2.0; Т3=1.0; |
|
2 |
седло; устойчивый узел; |
S2 |
N5 |
K1=1.0; k2=1.0; A1=1.0; А2=0.8; |
|
3 |
устойчивый фокус; ЭЛЛИПС; |
S3 |
N4 а=1.О е=0.5 m=0.25 |
K1=1.0; k2=l.0; к3=0.2; |
|
4 |
Неустойчивый фокус; седло; |
S4 |
N2 а=0.2 е=2.5 |
K1=10; к2=1.О; к3=5.0; Т3=1.0; |
|
5 |
устойчивый узел; неустойчивый фокус; |
S1 |
N4 а=1.О е=4.0 m=2.8 |
K1=8.0; k2=1.0; к3=2.0; к4=4.0; Т3=2.0; |
|
6 |
эллипс; устойчивый фокус; |
S2 |
N5 |
K1=1.8; k2=2.4; A1=1.0; А2=0.5; |
|
7 |
эллипс; седло; |
S3 |
N4 а=2.0 е=1.0 m=0.6 |
K1=1.5; к2=1-2; к3=0.3; |
|
8 |
неустойчивый узел устойчивый фокус; |
S4 |
N2 а=1.0 е=4.0 |
K1=8.0; k2=1.0; к3=2.0; Т3=2.0; |
Таблица 4.3.