

Исходные данные для проведения исследований Структурная схема нсау

Рис 5.1.
Таблица 5.1
Значения параметров НЭ и Wлч(p) НСАУ
|
№ вари анта |
Вид характеристики нелинейного элемента |
Передаточная функция линейной части |
||
|
W1(p) |
W2(p) |
W3(p) |
||
|
1 |
|
|
|
|
|
2 |
|
|
|
- |
|
3 |
|
|
|
- |
|
4 |
|
|
|
- |
|
5 |
|
|
|
|
|
6 |
|
|
|
|
|
7 |
|
|
|
|
|
8 |
|
|
|
|
|
9 |
|
|
|
|
|
10 |
|
|
|
|
|
11 |
|
|
|
|
|
12 |
|
|
|
|
|
13 |
|
|
|
|
|
14 |
|
|
|
|
|
15 |
|
|
|
- |
|
16 |
|
|
|
- |
|
17 |
|
|
|
- |
|
18 |
|
|
|
- |
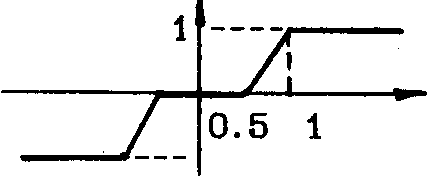

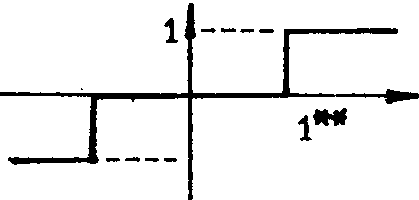



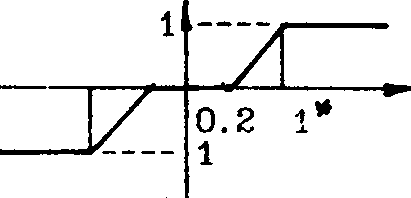


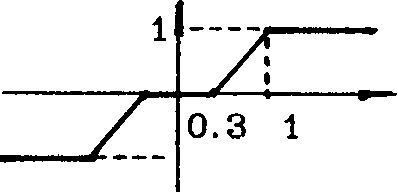
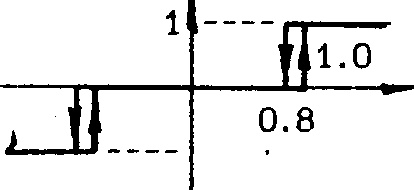

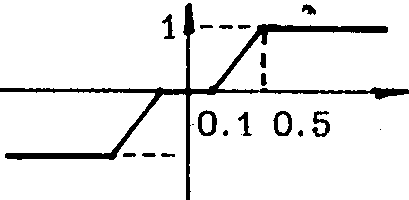
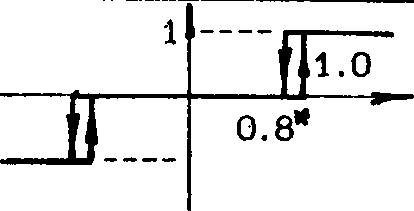

Примечание: в таблице выделены варьируемые параметры:
* - 1-ый варьируемый параметр;** - 2-ой варьируемый параметр.
Вопросы для подготовки работы к защите
1. Сформулируйте критерий Попова (в аналитическом и графическом варианте) для анализа устойчивости положения равновесия применительно к выполненному варианту задания.
2. Сформулируйте критерий Гелига применительно к НСАУ, исследуемой в Вашем варианте.
3. Объясните форму полученного графика границы области устойчивости НСАУ.
4. Дайте определение и изложите методику аналитического нахождения эквивалентного комплексного коэффициента усиления нелинейного звена Wнэ(A). Сравните годограф Wнэ(A), построенный на основе цифрового моделирования, с аналитическим представлением.
5. Основываясь на предпосылках метода гармонической линеаризации, сформулируйте условия возникновения в НСАУ устойчивых автоколебаний. Поясните на полученных графических результатах выполнение этих условий применительно к исследуемой системе.
Занятие 6 исследование линейных импульсных систем автоматического управления
Целью работы является исследование особенностей динамики линейных импульсных САУ с амплитудной модуляцией, связанных с наличием в них квантования по времени. Изучаются свойства реального импульсного элемента, условия устойчивости линейных импульсных систем (ИСАУ), переходные процессы при регулярных воздействиях, оптимальные процессы конечной длительности, а также методика коррекции импульсных САУ.
Программа исследований
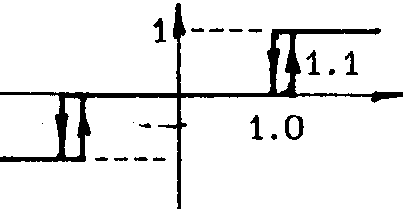
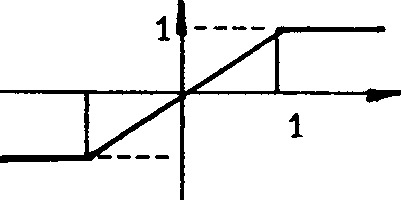
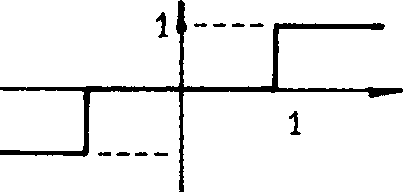
1. Определение передаточной функции элемента с заданной формой импульса (см. методические указания).
1.1. Проанализировать форму импульса, представленную на экране, и ввести коэффициенты передаточной функции элемента, формирующего заданную импульсную последовательность.
1.2. При совпадении формы заданного импульса и импульса, определяемого введенной передаточной функцией, занести в протокол передаточную функцию и вид импульса, в противном случае - повторить п.1.1.
2. Определение условий, когда ИСАУ может рассматриваться как непрерывная (см. методические указания).
2.1.В соответствии с вариантом работы ввести параметры ИСАУ.
2.2. Проанализировать виды спектров входного квантованного и выходного сигналов, представленные на экране, и ввести период квантования T0 импульсного элемента, который позволит рассматривать ИСАУ как непрерывную.
2.3. Сравнить переходные процессы в импульсной САУ и аналогичной непрерывной системе и ввести такие параметры непрерывной части ИСАУ, которые обеспечивали бы необходимую степень фильтрации квантованного сигнала и совпадение переходных процессов с ошибкой менее 10% (см. методические указания).
2.4. Установив значения параметров ИСАУ, обеспечивающие непрерывный характер регулирования, занести в протокол следующую информацию:
- структурную схему и значения параметров ИСАУ;
- вид спектров входного и квантованного сигналов;
- графики переходных процессов в импульсной и соответствующей непрерывной системе.
3. Исследование устойчивости замкнутой импульсной системы.
3.1. Установить параметры ИСАУ, найденные в результате выполнения п.2 работы.
3.2. Последовательно изменяя коэффициент усиления и анализируя годограф и переходный процесс в ИСАУ, определить для заданного периода квантования T0 граничный коэффициент усиления kгр.
3.3. Занести полученную точку на график kгр(T0).
3.4. Повторяя п.3.2 и п.3.3 для различных периодов квантования (8..10 точек), построить график зависимости kгр(T0) в диапазоне T0=0.05T1...2T2, где T1, T2 - соответственно наименьшая и наибольшая постоянная времени непрерывной части ИСАУ.
3.5. Занести в протокол следующую информацию :
- изображения годографа и переходного процесса в ИСАУ для трех случаев :
k > kгр , k = 4гр , k < kгр при одном и том же значении T0;
- график зависимости kгр(T0).
4. Минимизация длительности переходного процесса в замкнутой импульсной системе (см. методические указания).
4.1. Ввести параметры ИСАУ, использованные при расчетах в процессе самостоятельной подготовки (п.4).
4.2. Наблюдать на экране вид переходного процесса в замкнутой ИСАУ.
4.3. На основании представленной на экране информации о передаточной функции ИСАУ, ее нулях и полюсах выбрать порядки вспомогательных полиномов M*(z) и N*(z),определяющих передаточную функцию последовательного корректирующего звена Wк*(z) (п.4 самостоятельной подготовки).
4.4. Ввести в компьютер систему уравнений относительно коэффициентов полиномов М*(z) и N*(z), полученную в ходе самостоятельной подготовки (п.4).
4.5. Если оптимальный процесс конечной длительности в системе не наблюдается, повторить п.4.3 или п.4.4.
4.6. Ввести в коэффициенты полинома N*(z) вариацию в пределах 5-20 % и наблюдать переходный процесс в системе в реальной ситуации, когда не может быть обеспечена точная компенсация ряда членов знаменателя передаточной функции ИСАУ.
4.7.Занести в протокол следующую информацию:
- передаточную функцию W*(z) ИСАУ без коррекции;
- значения нулей и полюсов W*(z);
- систему алгебраических уравнений относительно коэффициентов полиномов M*(z) и N*(z);
- импульсные передаточные функции корректирующего звена Wк*(z) и замкнутой скорректированной ИСАУ Kз*(z);
- графики переходных процессов в ИСАУ без коррекции и с включением последовательного корректирующего звена;
- график переходного процесса в скорректированной ИСАУ при неполной коррекции (результаты выполнения п.4.6).