

Задание на подготовку к работе
1. Записать передаточные функции типовых законов регули- рования и определить вид преобразования сигнала, реализуемого каждым типом регулятора.
2. Вывести формулы для расчета статической и кинетической ошибки САР для случаев П-, ПИ-, ПД- и ПИД-регуляторов и для объектов с самовыравниванием и без самовыравнивания (см. методические указания по выполнению работы).
3. Качественно оценить влияние параметров типовых законов регулирования на показатели качества переходного процесса: время регулирования tp, перерегулирование σ, установившуюся ошибку Δуст. Построить предполагаемые зависимости.
4. Качественно оценить влияние параметров нелинейного трехпозиционного регулятора на показатели качества переходного процесса. Построить предполагаемые зависимости.
Методические указания по выполнению работы.
При выполнении первого пункта задания требуется путем выбора коэффициентов настройки регулятора обеспечить требования по точности САР, а также требования относительно показателей качества системы в переходном режиме (величины перерегулирования и времени регулирования). В зависимости от типа объекта и вида воздействующих на входы системы сигналов могут быть сформулированы требования по обеспечению на выходе системы заданного значения статической или кинетической ошибки как по управляющему, так и по возмущающему воздействию.
Общая структурная схема исследуемой САР с типовым регулятором представлена на рис 2.1.
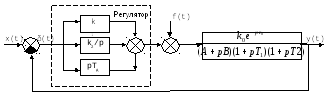
Рис.2.1
В общем случае регулирующее воздействие включает пропорциональную (k1≠0), интегральную (k2≠0) и дифференциальную (Tд≠0) составляющие, формируемые по сигналу отклонения σ(t). Объект также представлен в общем виде звеном с передаточной функцией, содержащей в знаменателе полином третьего порядка относительно комплексного аргумента, а в числителе описание звена транспортного запаздывания. Основываясь на общем представлении, можно исследовать два типа объектов: объекты с самовыравниванием (A≠0, B=T3) и объекты без самовыравнивания (А=0, k0/В - добротность объекта).
Качество процессов отработки задающего x(t) и возмущающего
f(t) воздействий в установившемся режиме характеризуется ошибкой САР. В работе исследуется два типа ошибок САР - статическая и кинетическая, возникающие при подаче ступенчатого и, соответственно, линейно изменяющегося сигнала на входы системы. Статическая ошибка по управляющему и возмущающему воздействию определяется при подаче сигналов x(t)=x010(t) и f(t)=F010(t) на основе следующих соотношений:
Δст
x
=
![]() [pWδx(p)
[pWδx(p)![]() ]
= Wδx(p)
x0
(2.1)
]
= Wδx(p)
x0
(2.1)
Δст
f
=
![]() [pWδf(p)
[pWδf(p)![]() ]
= Wδf(p)
F0
(2.1)
]
= Wδf(p)
F0
(2.1)
Передаточные функции относительно входов x(t) и f(t) для САР, представленной на рис.2.1, имеют вид:
Wδx(p)
=
![]() (2.3)
(2.3)
Wδf(p)
=
 (2.4)
(2.4)
Из выражений (2.3) и (2.4) следует, что при наличии в законе регулирования интегральной составляющей (к2≠О) и при рассмотрении объекта с самовыравниванием (А≠О) Wδx(p) = Wδf(p) =0 и статическая ошибка САР Δст x = Δстf = 0.
Этот вывод также справедлив для САР, содержащей объект без самовыравнивания (А=0) и регулятор с интегрирующим звеном.
При отсутствии в законе регулирования интегральной составляющей передаточные функции по задающему и возмущающему воздействию имеют вид
Wδx(p)
=
![]() (2.5)
(2.5)
Wδf(p)
=
 (2.6)
(2.6)
В этом случае для объекта с самовыравниванием:
Δст x = 1/(1+k0k1/A), Δст f = (k0/A)/(1+k0k1/A),
для объекта без самовыравнивания:
Δст x = 0, Δст f = 1/k1.
Точность САР в установившемся режиме при отработке сигнала постоянной скорости (x(t)=X1t10(t), f(t)=F1t10(t)) определяется кинетической ошибкой
ΔкинX
=
![]() [X1
Wδx(p)/p]
(2.7)
[X1
Wδx(p)/p]
(2.7)
ΔкинF
=
![]() [F1
Wδf(p)/p]
(2.8)
[F1
Wδf(p)/p]
(2.8)
Как и при анализе статической ошибки САР на основе определений (2.7) и (2.8) и, принимая во внимание вид передаточных функций по каждому из входов САР (формулы (2.3)-(2.6)), нетрудно получить выражения для расчета кинетической ошибки системы, что предлагается в качестве вопроса для самостоятельной проработки при подготовке к занятию.
Полученные выражения для ошибок САР используются в процессе исследований для оценки ограничений на диапазон изменения коэффициентов k1 и k2 при настройке регулятора.
В переходном режиме основными критериями для определения настроек регулятора являются величина перерегулирования переходной характеристики σ и время регулирования tp. Выбор коэффициентов настройки регулятора для типовых законов регулирования рекомендуется проводить на основании построения номограмм, характеризующих зависимости показателей качества при варьировании одного из коэффициентов настройки и фиксированных значениях других коэффициентов. Для исходной постановки задачи, когда требуется обеспечить заданные ограничения на величину перерегулирования и, одновременно, минимизировать длительность переходного процесса, номограммы зависимости σ(k1) позволяют оценить допустимый интервал изменения варьируемого параметра, на котором затем определяется точка, обеспечивающая минимальное значение параметра tp.