

Часть 2. Синтез корректирующего устройства в форме стабилизирующей отрицательной обратной связи.
2.1. Путем ввода в ПК заданных вариантом коэффициентов установите структуру и значения параметров звеньев исследуемой САР (табл. 3.1).
2.2. Проанализируйте с позиции оценки устойчивости и качества переходный процесс в замкнутой системе, а также ЛАЧХ и ФЧХ разомкнутой системы.
2.3. Постройте желаемую ЛАЧХ системы из условия, что одно из звеньев САР (в зависимости от варианта задания ) охватывается жесткой обратной связью. Требования к показателям качества системы указаны в п. 1.3.
2.4. Определите по отображаемой ЛАЧХ корректирующего звена значения параметров звена жесткой обратной связи и введите их в ПК.
2.5. Проанализируйте характер переходного процесса, а также фазочастотную характеристику скорректированной системы.
2.6. Изменяя значение коэффициента передачи корректирующего звена, зафиксируйте изменение параметров качества САР в форме графиков зависимостей ошибки, величины перерегулирования и времени регулирования от коэффициента усиления или добротности системы. Определите по найденным зависимостям значение коэффициента передачи, обеспечивающее минимальное время регулирования при заданных ограничениях на величину ошибки и перерегулирования.
2.7. Повторите процедуру синтеза корректирующего эвена и исследование системы (п.п.2.3 + 2.6) в случае, когда коррекция осуществляется путем введения звена гибкой обратной связи с передаточной функцией, соответствующей реальному дифференцирующему звену. Величину ошибки на выходе системы следует принять в пределах Δуст ≤ 1.0%.
Задание на подготовку к работе.
1. Повторите раздел курса ТАУ "Синтез линейных САР", обратив особое внимание на уяснение следующих вопросов: понятие качества САР, показатели качества системы, коррекция САР путем введения корректирующих обратных связей (жесткой или гибкой), синтез параллельного и последовательного корректирующих устройств методом построения желаемой ЛАЧХ разомкнутой системы.
2. Для системы заданной структуры (по вариантам) постройте следующие характеристики:
- ЛАЧХ исходной разомкнутой системы,
- вид желаемой ЛАЧХ системы, скорректированной последо-
вательным включением в контур регулирования одного и двух упругих звеньев,
- вид желаемой ЛАЧХ для случая коррекции введением жесткой и гибкой обратных связей, как это указано в варианте задания.
Методические указания по выполнению работы.
Исследуемая система регулирования содержит три динамических звена первого порядка. В зависимости от варианта задания (табл. 3.1) система является либо статической (три инерционных звена), либо астатической (интегрирующее и два инерционных звена).
Структура системы и значения параметров динамических звеньев вводятся на первом этапе исследования в соответствии с вариантом. Исходная система является неустойчивой, в чем следует убедиться, наблюдая переходный процесс на выходе замкнутой САР. Характерной особенностью неустойчивой системы является отрицательный запас по фазе ( значение фазового угла комплексного коэффициента передачи на частоте среза φ(ωср) ≤ π). ФЧХ системы можно проанализировать в процессе исследования.
В соответствии с заданием требуется исследовать различные варианты коррекции исходной САР. При этом ставится задача достижения устойчивости системы и обеспечение заданного качества САР по основным показателям: ошибка системы в установившемся режиме (статическая или кинетическая), величина перерегулирования и время достижения установившегося состояния.
В первой части работы (п.п. 1.1+1.7) проводится коррекция исходной САР способом последовательного включения в контур регулирования одного или двух упругих звеньев. В конечном итоге задача состоит в выборе параметров соответствующих корректирующих звеньев, обеспечивающих достижение заданного качества переходного процесса в замкнутой системе. Для решения задачи синтеза корректирующего звена в работе используется графоаналитический метод, основанный на построении логарифмических частотных характеристик.
Для случая последовательной коррекции, исследуемой в первой части работы, соотношения для логарифмических частотных характеристик (Lск(ω) и φск(ω)) скорректированной системы ( рис.3.1) имеют вид:
Lск(ω) = Lнс(ω) + Lк(ω)
φск(ω) = φнс(ω) + φк(ω) (3.1)
где LHC(ω), φнс(ω) - ЛАЧХ и ФЧХ исходной системы,
Lк(ω), φк(ω) - ЛАЧХ и ФЧХ звена коррекции.
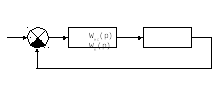
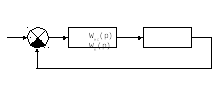
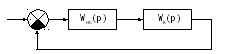
Рис. 3.1.
Из (3.1) следует основное соотношение для нахождения
LК(ω) = LСК(ω) + LНС(ω) (3.2)
Важным этапом синтеза корректирующего звена является выбор вида и построение желаемой ЛАХЧ скорректированной системы. Построение LCК(ω)осуществляется с учетом следующих рекомендаций:
- наклоны участков ЛАЧХ в области низких и высоких частот для скорректированной системы следует задавать равными наклону соответствующих участков ЛАЧХ исходной системы (исключением является случай, когда корректирующей жесткой обратной связью охватывается интегрирующее звено и система становится статической);
- для построения низкочастотного участка желаемой ЛАЧХ следует принимать во внимание соотношения, связывающие заданную величину ошибки на выходе системы в установившемся режиме с коэффициентом усиления (kР) или добротностью (D) разомкнутой САР ( Δст = 1/(1+kp)или Δкин = 1/D);
- на частоте среза ω = ωср (LCK(ωср)=O) наклон желаемой характеристики рекомендуется задавать равным -20 дВ/дек;
- величина частоты среза выбирается с учетом соотношения tp < 4π/ ωср.
- сопрягающие частоты ω1 и ω2, лежащие ниже н выше частоты среза, должны отстоять от ωср на 0.1+0.9 декады, что позволит обеспечить достаточный запас по фазе и требуемое качество переходного процесса.
Исходя из перечисленных рекомендаций производится построение желаемой ЛАЧХ скорректированной системы. Применяемые для построения ЛАЧХ инструментальные средства позволяют путем последовательного задания точек перегиба характеристики формировать на экране дисплея кусочно-линейную ЛАЧХ и при необходимости редактировать форму ломаной.
По завершению ввода ЛАЧХ скорректированной системы путем выбора соответствующего пункта меню производится вычисление и отображение на дисплее ЛАЧХ звена коррекции. Если полученная характеристика LК(ω) не соответствует типу корректирующего звена, исследуемому на данном этапе работы, то следует вернуться к построению желаемой ЛАЧХ и провести необходимую коррекцию LCК(ω)
Далее по виду LК(ω) могут быть определены параметры звена: для одного упругого звена - коэффициент усиления и две постоянных времени, а в случае использования для коррекции двух упругих звеньев - коэффициент усиления и четыре постоянных времени.
Контроль за правильностью ввода параметров звена коррекции осуществляется путем отображения характеристики, соответствующей введенным значениям и сравнения ее с LК(ω), полученной на основе построений желаемой ЛАЧХ.
Одновременно с отображением кривой переходного процесса на выходе скорректированной системы выводятся значения показателей качества САР. Очевидно, что существует бесконечное число вариантов коррекции исходной системы при заданном типе корректирующего звена, отличающиеся лишь конкретными значениями параметров и обеспечивающие достижение точности и перерегулирования в системе в пределах установленных в задании ограничений. С целью выбора окончательного варианта коррекции (см. п.1.6 программы исследований) предлагается исследовать влияние коэффициента усиления (добротности) разомкнутой системы на длительность переходного процесса.
В процессе работы для нескольких значений Kр или D определяются показатели качества и полученные данные используются для построения зависимостей Δ(kр), σ(kp) и tp(kp). Полученные зависимости позволяют определить вариант коррекции, обеспечивающий минимальное время регулирования в системе при одновременном выполнении ограничений по другим показателям.
Следует обратить внимание на то, что повышение требований к точности корректируемой САР несколько усложняет корректирующее устройство. По этой причине в п. 1.7 задания требуется синтезировать корректирующее устройство, состоящее из двух последовательно включенных упругих звеньев и обеспечивающее величину ошибки не более 1%.
Во второй части работы исследуется параллельная коррекция САР, когда одно из звеньев системы охватывается жесткой или гибкой отрицательной обратной связью. В этом случае также используется метод построения ЛАЧХ, хотя задача синтеза звена стабилизирующей отрицательной обратной связи методом коррекции ЛАЧХ решается несколько сложнее, чем в случае синтеза последовательного корректирующего устройства.
В качестве исходного выражения для определения ЛАЧХ звена коррекции используется передаточная функция разомкнутой скорректированной системы (рис.3.2):
WСК(p)
=
![]()
где Wo(p), WK(p) - передаточные функции звена, охватываемого обратной связью и звена коррекции,
W1(p) - передаточная функция частя САР, не охваченной корректирующей связью.
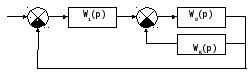
Рис.3.2
Рассматриваются две области частот, соответствующие условиям |Wo(jw) WK(jw)| ≤ 1 и |WO(jw) WK(jw)| ≥ 1. В первом случае звено
коррекции не оказывает существенного влияния на характеристики исходной системы и можно приближенно считать, что Lck(w)≈ LHc(w) и φск(ω) ≈ φнс(ω). Во второй частотной области справедливы следующие приближенные выражения:
Lск(ω) ≈ Lнс(ω) - Lк(ω) – L0(ω)
φск(ω) ≈ φнс(ω) + φк(ω) – φ0(ω) (3.4)
Из (3.4) может быть получено выражение для нахождения Lk(ω):
LК(ω) ≈ LНС(ω) - LСК(ω) – L0(ω) (3.5)
При этом диапазон частот, в пределах которого в соответстии с (3.5) определяется LК(ω), ограничен условием |Wo(jw)WK(jw)| >1, или (LК(ω) + L0(ω)) > 0.
На начальных этапах синтеза корректирующего устройства производится построение ЛАЧХ исходной системы и желаемой характеристики скорректированной САР. При этом можно руководствоваться приведенными выше рекомендациями. Далее на основе отображаемой LK(ω) и с учетом ограничения на частотную область вводятся параметры звена коррекции (коэффициент жесткой обратной связи в одном варианте коррекции или коэффициент и постоянная времени реального дифференцирующего звена в случае коррекции гибкой обратной связью). Результат коррекции отображается в виде графика переходного процесса на выходе скорректированной САР с выводом соответствующих значений показателей качества системы.