

Задача 3.3. Динамический расчёт системы с взаимозависимыми перемещениями сосредоточенных масс
m(3)
m(4)
J6
y8
l1
l2
/2
l2
/2
J8
J7
y6









































y3
y7
lm




y1
y5
m(1)
m(2)
J5
J3


J1
y2
y4
J4
J2





Рис.3.37
На рис. 3.37, б обозначены компоненты перемещений масс и инерционных силовых факторов, без учёта их возможной взаи-мозависимости, но в предположении отсутствия вертикального перемещения массы m(4). Используя обозначения, введённые в п. 1.6, вектор исходных перемещений масс формируем как вось-микомпонентный: y = [ y1 y2 y3 y4 y5 y6 y7 y8]т , соответ-ствующий вектор исходных инерционных силовых факторов –
J = [ J1 J2 J3 J4 J5 J6 J7 J8]т .
Их компоненты в случае собственных колебаний связаны
зависимостью
J
=![]() (при
гармонических
вынужденных коле-
(при
гармонических
вынужденных коле-
баниях заменяется на F ),
г
![]()
 .
.









![]()
![]()
м




 асс
как
минимальное
количество
связей,
асс
как
минимальное
количество
связей,
н










![]()
п


 еремещений
масс
(
рис. 3.38
). Пренебре-
еремещений
масс
(
рис. 3.38
). Пренебре-
г
Рис. 3.38




н

![]() перемещения, по направлениям
которых постав-лены связи на рис.
3.38 и
проанализировав взаимозависимости
между перемещениями
y,
обозначенными на рис. 3.37,
выражаем последние через
перемещения, по направлениям
которых постав-лены связи на рис.
3.38 и
проанализировав взаимозависимости
между перемещениями
y,
обозначенными на рис. 3.37,
выражаем последние через
![]() :
y1
=
:
y1
=![]() y2
= y6
=
y2
= y6
=![]() y3
=
y3
=![]() y4
=
y4
=![]()
y5
=![]() y7
=
y8
=
y7
=
y8
=![]()
Матрица связи между векто-
рами исходных y и групповых ( об-
общённых
)
![]() перемещений масс:
перемещений масс:
Используем её для определе-
ния групповых инерционных сило-
вых
факторов
![]() соответствующих
соответствующих
обобщённым
перемещениям
![]() ,
и
,
и
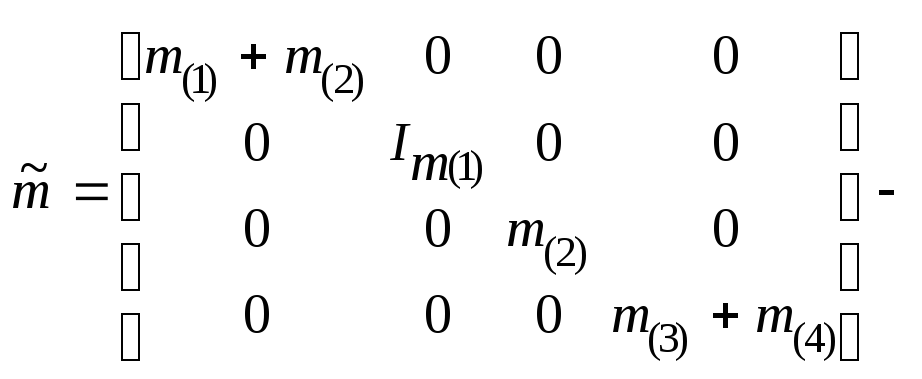
для формирования
матрицы
приведённых
масс
![]() порождающих
порождающих
групповые
![]() По формулам (
1.108
) и (
1.107
):
По формулам (
1.108
) и (
1.107
):



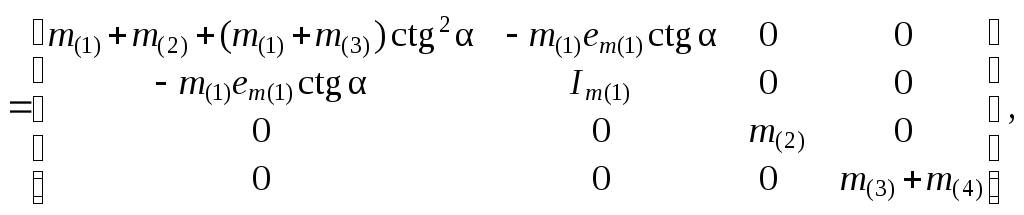
где
Im(1)
= Im0(1)
+
m(1)![]() (
здесь
Im0(1)
=
(
здесь
Im0(1)
=![]() em
=
lm
/
2
).
em
=
lm
/
2
).
Для
контроля:
при
= /2
(
левая
нижняя стойка – вертикальная
)
из вышепри-ведённых матриц получается
![]() =
[ J1+J5
J3
J4
J7
+J8
]т
–
исчезают
J2
и
J6
,
так как
=
[ J1+J5
J3
J4
J7
+J8
]т
–
исчезают
J2
и
J6
,
так как
становятся невозможными вертикальные перемещения масс m(1) и m(2) ( см. рис. 3.37 );
 смысл
этих матриц очевиден.
смысл
этих матриц очевиден.
Динамические расчёты рассматриваемой системы проще
выполнять по
уравнениям в амплитудах перемещений:
![]()
для случая
собственных колебаний и
![]() при
вынуж-
при
вынуж-
денных колебаниях – с использованием основной системы МП,
п
Z1
, Z2
, Z3
и
Z4
– это амплиту-ды независимых перемещений
масс. Остальные
–
дополни-тельные
(
угловые
) перемеще-ния
расчётных узлов ОСМП.
Обратим
внимание
на
то,
что присутствующие
в
расчёт-ной
схеме
инерционные сило-вые факторы в явном
виде в уравнения не входят, так как
отражены в динамических по-правках в
компонентах
матриц
динамической
жёсткости
![]() и
и
![]() ( см.
п. 1.5.4.4 и п.1.5.5
).
( см.
п. 1.5.4.4 и п.1.5.5
).
Z5
Z6
![]()
Z1
=
Z2
=
Z3
=
Z4
=
Z7
Z8




























![]()





























![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()
Рис. 3.39
Далее решение строится так, как описано в задаче 3.1,
в том числе с
возможным переходом
к
уравнениям
![]() и
и
![]() ,
относящимся
к
рассчитываемой
системе,
–
путём
,
относящимся
к
рассчитываемой
системе,
–
путём
исключения дополнительных неизвестных Zd = [ Z5 Z6 Z7 Z8 ]т .
Единичные состояния ОСМП, необходимые для построения матрицы её жёсткости r0 , изображены на рис. 3.40.
k41
k41
k41
k41
k41![]()
![]()
![]()
![]()
![]()
k41
k41
k41












![]()
![]()
![]()
k41
k41








































![]()
![]()
k41
k41
k41
k41
k41
k41
k41
















![]()
![]()
![]()
![]()
![]()
![]()
![]()
k41
Z2=
1


![]()
k41
k41
k41



















![]()
![]()











Z1=
1
Z3=
1

















k41
k41






![]()
![]()

k41


![]()





k41
k41
k41
k41
k41
k41
k41
Z4=
1![]()
![]()
![]()
![]()
![]()
![]()
![]()
Z6=
1
Z5=
1





k41
k41
k41



































![]()
![]()
![]()

k41
k41
k41
k41
k41
k41




















































![]()
![]()
![]()
![]()
![]()
![]()
k41
k41
k41














![]()
![]()
![]()
k41
k41
![]()
![]()



















k41
k41
k41


![]()
![]()
![]()






k41
k41
k41
k41
k41
k41
k41![]()
![]()
![]()
![]()
![]()
![]()
![]()
k41
k41




![]()
![]()












Z8=
1
k41
k41
k41
k41










































![]()
![]()
![]()
![]()
Z7=
1
k41![]()
k41













![]()


















k41![]()
Рис. 3.40
Матрицу
динамической
жёсткости
системы при собствен-ных колебаниях
![]() формируем, используя матрицу
жёсткости ОСМП
r0
и полученную
ранее матрицу масс
формируем, используя матрицу
жёсткости ОСМП
r0
и полученную
ранее матрицу масс
![]() :
:
![]()
С и м м е
т р и ч н о![]()
 где
где
![]()
Матрица
динамической
жёсткости
![]() при
вынужденных
гар-монических
колебаниях отличается от
при
вынужденных
гар-монических
колебаниях отличается от
![]() частотой
F
вместо
.
частотой
F
вместо
.
Ненулевые единичные реакции r0, ik определяются обычным по-рядком при конкретных числовых значениях геометрических и жесткостных параметров системы.
![]()
![]()
![]() и
и
![]()

![]()






 по
рис. 3.41. Весовые
коэффи-
по
рис. 3.41. Весовые
коэффи-
циенты k11 , k12 , …, k42 компо-
![]()
![]()
![]()
![]() и
и
![]() определяются из
усло-
определяются из
усло-





 вия
пропорциональности
сил
вия
пропорциональности
сил
![]()
![]()
ниям ( при гармонических коле-
баниях ): k11 : k12 : k13 : k14 =
Рис. 3.41




Учитывая, что y1 = y5 ( см.
рис. 3.37 ), y2 = y6 = y1ctg , получаем k11 : k12 : k13 : k14 =
= 1 : ctg : m(2)/m(1) : (m(3)/m(1)) ctg . Значения k1j находим из ус-ловия k11 + k12 + k13 + k14 = 1. Например, при = /3 , m(2) = m(1) , m(3) = 0,5 m(1) : k11 = k13 = 0,3489; k12 = 0,2015; k14 = 0,1007. Осталь-ные коэффициенты: k41 = m(3) / (m(3) + m(4)); k42 = m(4) / (m(3) + m(4)).
k14

ik матрицы упругой податливости а)
р
k11
k13







в аем
её единичные
состояния,
изо-
аем
её единичные
состояния,
изо-
б
k12
![]() k
= 2
k
= 2






















![]()

![]()


k42
k41
б) в) г)
![]() k
= 2
k
= 2


![]() k
= 2
k
= 2![]() k
= 2
k
= 2
Р ис.
3.42
ис.
3.42
После
нахождения
единичных
силовых факторов
от
![]()
![]() (
рис.
3.43
)
и
вычисления
по
ним перемещений
ik
подоб-
(
рис.
3.43
)
и
вычисления
по
ним перемещений
ik
подоб-
но тому, как это сделано в задаче 3.1, формируем матрицы дина-

































![]()



![]()
![]()
![]()
Рис. 3.43
мической
податливости
для
случаев
собственных
и
гармоничес-ких
вынужденных колебаний:![]() и
и
![]() ,
где
,
где
