

3.5.2. Негармоническое кинематическое воздействие
Рассмотрим расчёт на смещение основания, изменяющееся
в
(t)
t



![]() (
рис.
3.52
), где
cм;
(
рис.
3.52
), где
cм;
![]() = t
/
T0
;
T0
=
0,6
c
;
= t
/
T0
;
T0
=
0,6
c
;
з
0
T0
T0
/
3



метричного воздействия используем
п
Рис. 3.52
симметрии ( см. п. 1.6 ). Схема поло-
вины рамы представлена на рис. 3.53. Матрица её упругой по-
y2(t)
y4(t)
m(2)
m(1)


![]()
(t)
y3(t)
m(3)
EI2
c1





































 образованием
компонентов
ранее
образованием
компонентов
ранее
EI1

![]() ,
такова:
,
такова:
c2
y1(t)
Рис. 3.53 Матрица масс:

 m
= m(3)
1,5m(1)+
m(2)
m(2)+
m(3)
m(1)
=
m
= m(3)
1,5m(1)+
m(2)
m(2)+
m(3)
m(1)
=
=




 21 т
12 т
25,5 т
5 т
; a
21 т
12 т
25,5 т
5 т
; a
![]() =
a1
a2
a3
a4
=
4,2 2,4 5,1
1 ; m0
=
m(1)
=
5
т
.
=
a1
a2
a3
a4
=
4,2 2,4 5,1
1 ; m0
=
m(1)
=
5
т
.
Решение
системы
уравнений
вынужденного
движения
1*А* (
табл. 1.3
) строим по
методу
конечных
разностей
( см.
п.
1.5.3
) в форме
(
1.36
) во временном
интервале [
0;
2T0
] с шагом
t
=
=
T0
/
40
=
0,008
c,
равным примерно 1/4 минимального периода
собственных колебаний. Уравнения для
некоторого расчётного момента
времени
tj
=
t![]() при найденных
выше значениях ком-
при найденных
выше значениях ком-
понентов матриц и a имеют следующий вид:
 4,2(
y1,
j–1
–
1,84762
y1,
j
+
y1,
j+1
)
+
2,4(
y2,
j–1
–
2
y2,
j
+
y2,
j+1
)
= B0
4,2(
y1,
j–1
–
1,84762
y1,
j
+
y1,
j+1
)
+
2,4(
y2,
j–1
–
2
y2,
j
+
y2,
j+1
)
= B0![]()
4,2( y1, j–1 – 2y1, j + y1, j+1 ) + 67,9( y2, j–1 – 1,990574 y2, j + y2, j+1 ) +
+3,1875(
y3,
j–1–
2y3,
j
+
y3,
j+1
)
–
0,6875(
y4,
j–1
–
2
y4,
j
+
y4,
j+1
)
=
B0![]()
1,5( y2, j–1 – 2 y2, j + y2, j+1 ) + 3,1875( y3, j–1 – 1,799216 y3, j + y3, j+1 ) +
+
0,3125(
y4,
j–1
–
2
y4,
j
+
y4,
j+1
)
= B0![]()
–1,65( y2, j–1 – 2 y2, j + y2, j+1 ) + 1,59375( y3, j–1 – 2 y3, j + y3, j+1 ) +
+
0,49858(
y4,
j–1
–
0,692765
y4,
j
+
y4,
j+1
)
= B0![]()
где
B0
=![]() =
0,64
м3
;
1c
=
2c
=
;
3c
=
4c
= 0
;
j
=
(tj).
=
0,64
м3
;
1c
=
2c
=
;
3c
=
4c
= 0
;
j
=
(tj).
Эти группы конечно-разностных уравнений (КРУ) записы-ваются для всех расчётных значений времени от t1 до t80 – всего 320 уравнений с 328 неизвестными ( с yi, 0 по yi, 81 , i = 1, 2, 3, 4 ). Баланс количеств неизвестных и уравнений обеспечивается учё-
том начальных
условий движения
четырёх масс: yi,
0
=
0;
![]()
![]() откуда yi,1
=
yi,2
/
8 (
из кубической
аппроксимации пере-
откуда yi,1
=
yi,2
/
8 (
из кубической
аппроксимации пере-
мещений по точкам t = 0, t = t и t = 2t ).
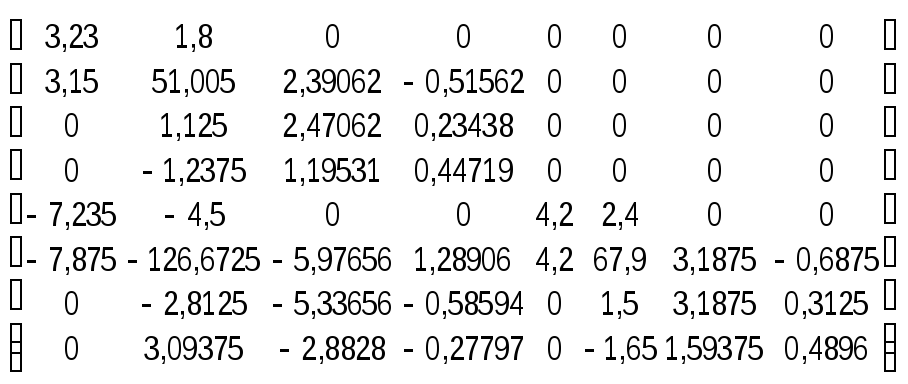
В системе КРУ
![]() матрица коэффициентов
матрица коэффициентов
A
=
 ;
её повторяющийся блок Ad
:
;
её повторяющийся блок Ad
:
A
 d
=
d
= .
.
В блоке А0 отражены начальные условия:
А0
= .
.
Компоненты вектора В вычисляются по значениям функ-ции (tj). При t > T0 движение системы происходит как свобод-ное; соответствующие конечно-разностные уравнения – одно-родные ( j = 0 ).
В результате решения системы линейных алгебраических уравнений получены по 80 значений каждой из функций y1(t), …, y4(t). Построенные по ним графики изменения во времени го-ризонтальных перемещений y1(t) (фундамента) и y2(t) (ригеля) представлены на рис. 3.54, а, а вертикальных y3(t) и y4(t) – на рис. 3.54, б ( с укрупнённым масштабом ординат ). На рис. 3.54, а дополнительно показан также график заданного смещения (t).
y1(t),
y2(t),
см
Г
о р и з о н т а л ь н ы е п е р е м е щ е н
и я м а с с
0,2
0,4
0,6
0,8
– 0,4
– 0,6
0





y1(t)
y2(t)


0,3
0,4
0,5
(t)
t,
с
а)



0,2
T0
0,1
0,6



– 0,2
– 0,8
y3(t),
y4(t),
см
В
е р т и к а л ь н ы е п е р е м е щ е н и я
м а с с
0,16



0
0,12
0,08
0,04
y3(t)
y4(t)


t,
с
б)
0,2
0,3
0,4
0,1
0,6
0,5





– 0,08
– 0,04
– 0,12
– 0,16
Рис. 3.54
Хорошо видно, что наиболее интенсивное ( горизонтальное ) движение масс ригеля происходит с доминированием низкочас-тотной компоненты по основному тону собственных колебаний. В остальных перемещениях явно наблюдаются сочетания ( в раз-ных пропорциях ) трёх гармоник с 1-й, 2-й и 3-й собственными частотами*). Высокочастотная составляющая, конечно, также присутствует, но отследить её по графикам yi(t) затруднительно.
Динамические изгибающие моменты в раме определяются через силы инерции: Mdyn(t) = M2 J2(t) + M4 J4(t), где моменты М2
и М4
от
J2
=1 и J4
=1 – соответственно как![]() и
и
![]() на
рис.
3.49.
на
рис.
3.49.
Силы инерции
вычисляются через ускорения: J2(t)
= –
![]() ;
;
J4(t)
=
–![]() ,
а ускорения
рассчитываются по
конечно-разност-ной
формуле
,
а ускорения
рассчитываются по
конечно-разност-ной
формуле
![]() через найденные
через найденные
перемещения yi, j ( i = 2, 4; j = 1, …, 81 ). На рис. 3.55 приведены результаты вычисления инерционных сил.
J2(t),
J4(t),
кН
15

J2(t) 10
5
t,
с
0,6
0,5
0
J4(t)


0,3
0,4
0,1
0,2





– 5
– 10
– 15
Рис. 3.55
Эти графики, полученные по вторым производным от y2(t) и y4(t), более детально выявляют спектральный состав переме-щений масс и соответствующих сил инерции: в изменении силы J2(t) отчётливо заметны гармонические составляющие первых двух главных форм собственных колебаний с периодами Т1 = = 0,519 с и Т2 = 0,127 с; а в J4(t) преобладают 3-я и 4-я формы с Т3 = 0,114 с и Т4 = 0,033 с.
*) Заметим, что 2-я и 3-я частоты собственных колебаний рассчитывае-
мой рамы мало отличаются друг от друга: 3 : 2 = 1,11.
Для двух характерных сечений – I ( у верха стойки ) и II ( в месте расположения массы m(1) ) имеем:
MI,
dyn(t)
=
4
м![]() ;
MII,
dyn(t)
=
2
м
;
MII,
dyn(t)
=
2
м![]() –
1
м
–
1
м![]() .
.
Максимальные значения этих моментов:
MI,
dyn,
max
=
4
м![]() ;
MII,
max
=
;
MII,
max
=![]() max
[
J2(t)
–
0,5
J4(t)],
где
max
[
J2(t)
–
0,5
J4(t)],
где
max J2(t) = 17,45 кН при t = 0,275 с; max [ J2(t) – 0,5 J4(t)] = 17,33 кН
при t
=
0,274
с;
тогда MI,
dyn,
max
=
69,8
кН![]() ;
MII,
max
=
34,66
кН
;
MII,
max
=
34,66
кН![]() .
.
Аналогично как тестовый выполнен конечно-разностный расчёт рамы на вибрационное смещение основания, рассмотрен-ное в п. 3.5.1, где дано точное решение. Начальные условия дви-
жения масс заданы
в виде yi,
0
=
0;
![]() =
c
yi
=
c
yi
![]()
Найденные перемещения представлены в таблице в сопо-ставлении со значениями, вычисленными по точным выражени-
ям
yi
(t)
= yi
sin
c
t![]() с амплитудами yi
из п. 3.5.1.
с амплитудами yi
из п. 3.5.1.
-
Время t, с
Перемещения, см
y1(t)
y2(t)
y3(t)
y4(t)
0
0 (0)
0 (0)
0 (0)
0 (0)
Тс /8 =
= 0,0694
0,4672 (0,4678)
2,9028
(2,9031)
0,0578 (0,0578)
–0,0605
(–0,0605)
Тс /4 =
= 0,1389
0,6620 (0,6616)
4,109
(4,106)
0,0819 (0,0818)
–0,0856
(–0,0855)
3Тс /8 =
= 0,2083
0,4677 (0,4678)
2,9026
(2,9031)
0,0578 (0,0578)
–0,0605
(–0,0605)
Тс /2 =
= 0,2778
–0,00023 (0)
–0,0070
(0)
–0,00017 (0)
0,00018
(0)
5Тс /8 =
= 0,3472
–0,4676
(–0,4678)
–2,9063
(–2,9031)
–0,0579
(–0,0578)
0,0606 (0,0605)
Примечание: в скобках – точные значения.
Погрешности в определении перемещений не превышают 0,21 % от соответствующих амплитуд.
В заключение напомним, что, во-первых, никаких принципиальных труд-ностей в расчёт по методу конечных разностей не вносит учёт диссипации энергии, в результате чего может быть выявлено затухание во времени коле-баний в стадии свободного движения; а во-вторых, если это необходимо, то вычисление перемещений может быть продолжено в следующем временном интервале ( см. п. 1.5.3 ).