

Структурные схемы типовых сау
Многоконтурные системы регулирования
Объект регулирования, как правило, не способен самостоятельно поддерживать заданные параметры на желаемом уровне при возмущающих воздействиях, изменять их по заданным законам, ограничивать на определенном уровне. Для компенсации возмущений, управления по заданным законам нужны специальные воздействия на объект. Эти воздействия оказываются управляющими устройствами - регуляторами.
В простейшем случае управляющее воздействие пропорционально рассогласованию между заданным и фактическим значением регулируемого параметра. В этом случае регулятор представляет собой устройство сравнения.
Любая САУ должна отвечать следующим требованиям:
1) должна быть устойчивой,
2) погрешность регулирования в установившемся режиме не должна быть больше заданной,
3) система должна обеспечивать необходимое качество переходных процессов (быстродействие, перерегулирование, колебательность).
Рассмотрим несколько вариантов САУ на примере электропривода постоянного тока. Здесь объектом является управляемый выпрямитель УВ и двигатель постоянного тока Д.
Простейшая САУ представлена на рисунке:
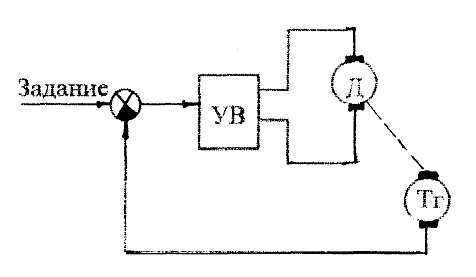
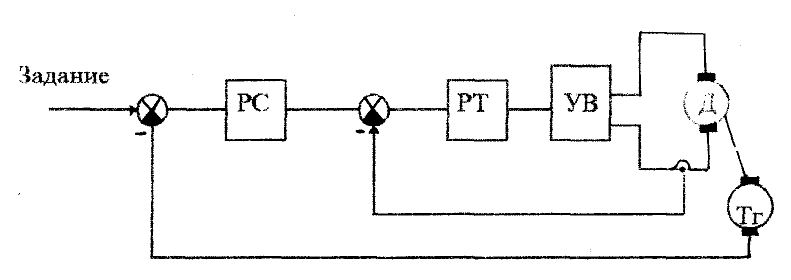
Быстродействие такой системы низкое, а точность регулирования мала. Для повышения точности требуется ввести дополнительный элемент - промежуточный усилитель, он же является регулятором скорости PC.
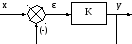
Ошибка
![]() зависит от величины K:
зависит от величины K:
![]() .
.
Чем больше К, тем меньше ошибка регулирования. Для увеличения клэффициента в систему вводится усилитель.
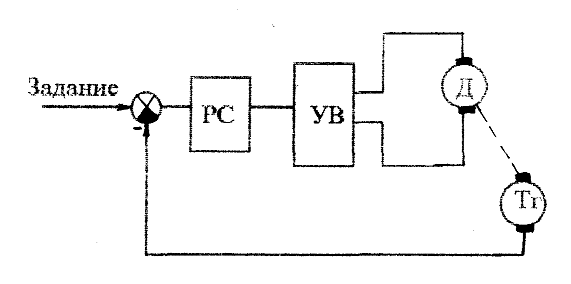
Уже при сравнительно небольшом коэффициенте усиления PC система теряет устойчивость, повышается колебательность системы, возникают недопустимые ускорения. Приходится вводить специальные корректирующие звенья. Они могут вводиться либо в местные (внутренние) обратные связи - параллельная коррекция, или в прямой канал последовательно с функционально необходимыми звеньями - последовательная коррекция. Корректирующие звенья могут быть активными или пассивными. Эта схема - граничный случай.
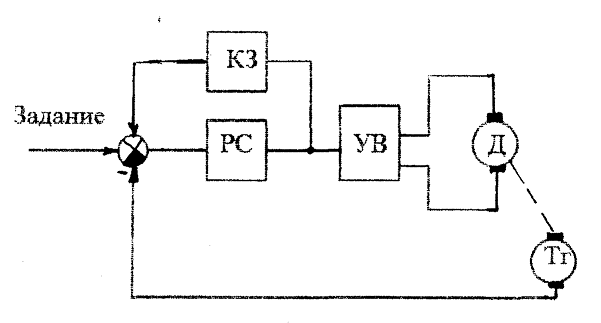
Если PC и КЗ рассматривать как единое активное корректирующее звено, то коррекция последовательная, если отдельно, то параллельная. Такие схемы, называемые одноконтурными, широко распространены. В качестве типичного примера параллельной коррекции можно привести схему с дополнительной связью по току.
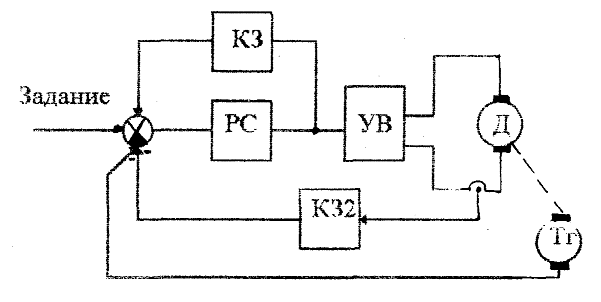
Звено К32 может отсутствовать (жесткая обратная связь). Сигнал обратной связи по току состоит из динамической и статической составляющих. Динамическая составляющая в переходных режимах оказывает корректирующее воздействие, а статическая - смягчает механическую характеристику. Если требуется жесткая механическая характеристика, то К32 должно иметь соответствующую передаточную функцию (должна стремиться к нулю при частоте близкой к нулю). При этом обратная связь по току в установившихся режимах не действует. (К32 - дифференцирующее звено, например). Системы стабильны, влияние помех невелико, т.к. корректирующие звенья включаются в обратную связь. Основные недостатки - сложность расчетов и трудоемкость настройки. Кроме того, систему следует всегда рассматривать, как единое целое; в большинстве случаев изменение одного из параметров требует перерасчета и перестройки всей системы. В этом отношении системы с последовательной коррекцией выгодно отличаются от систем с параллельной, особенно при сложной структуре объекта, большом числе регулируемых параметров и высоких требованиях к качеству регулирования.
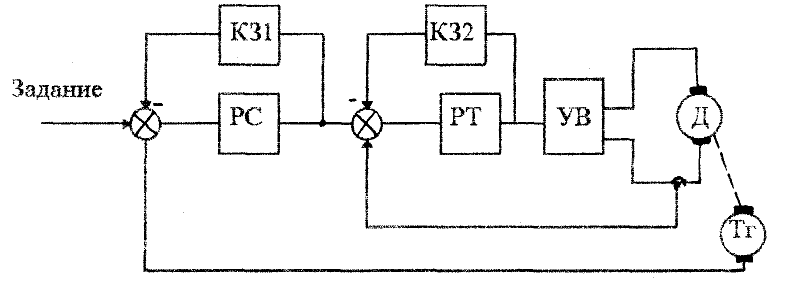
В этой схеме PC и К31, РТ и К32 представляют собой активные корректирующие звенья, включенные последовательно, т.е. схема может быть упрощена.
Схемы просты, удобны в расчете и настройке. Даже при небольшой точности определение параметров объекта позволяют получать вполне работоспособные системы. Позволяют ограничить любой из регулируемых параметров на заданном уровне, что является большим достоинством системы. Вводятся в эксплуатацию последовательной настройкой контуров, начиная с внутреннего. Система с последовательной коррекцией разбивается на ряд контуров по числу регулируемых параметров. Главным параметром является тот, который определяет основную цель автоматического регулирования. Остальные параметры - вспомогательные, они подчинены главному. Поэтому системы с последовательной коррекцией называют также системами подчиненного регулирования (управления).

В качестве корректирующих звеньев применяют пассивные RC цепи или операционные усилители с различными решающими цепями. Вопросы моделирования таких элементов рассмотрены выше.
Расчет параметров регуляторов.
Оптимизация контуров
Настройка СПР достигается последовательной оптимизацией контуров, начиная с внутреннего и кончая внешним. Под оптимизацией контура понимают такую его настройку, которая в наибольшей степени отвечает поставленным требованиям. Эти требования можно свести к двум основным: регулируемая величина должна как можно быстрее и точнее следить за изменением задания и как можно меньше отклонялись от заданного уровня при действии различных возмущений. В реальных системах эти требования - минимальное время отработки и отсутствие перерегулирования - обычно вступают в противоречия. Чем меньше время первого достижения установившегося значения при отработке скачка на входе, тем больше перерегулирование и наоборот.

Если не ставится задача минимизации времени при любом перерегулировании (1) или полном отсутствии перерегулирования (3), то кривая (2) представляет собой вполне приемлемый переходный приемлемый переходный процесс, оптимальный со всех точек зрения.
Перерегулирование невелико, а быстродействие достаточно.
Вопросы расчета
параметров регуляторов в СПР рассматриваются
в работах Ц. Кесслера, Д.С. Ямпольского
и других авторов. Подробное рассмотрение
этих вопросов не входит в задачи данного
курса. Рассмотрим основные принципы
оптимизации на достаточно простых
примерах, Пусть в контуре регулирования
имеется объект с несколькими малыми
постоянными времени типа инерционностей
и несколькими (или одной) большими.
Действие больших постоянных времени
подлежит компенсации регулятором,
поэтому передаточную функцию, содержащую
большие постоянные, назовем компенсируемой
частью объекта
![]() .
.
Например:
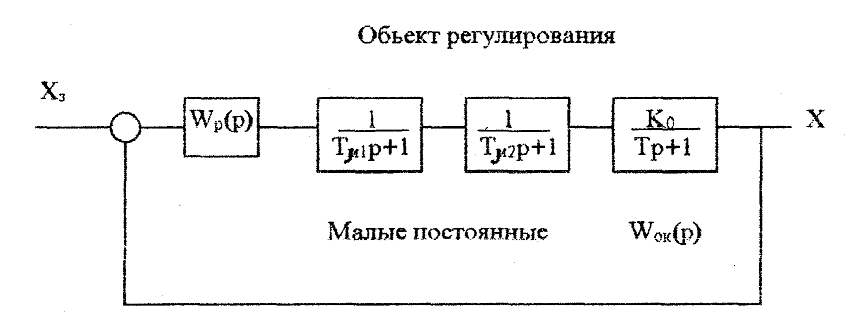
Общее правило компенсации основных инерционностей объекта регулирования можно сформулировать так:
![]()
Здесь
![]() - постоянная времени, в простейшем
случае, представленном на схеме
- постоянная времени, в простейшем
случае, представленном на схеме
![]() ,
,
![]() -
сумма малых постоянных.
-
сумма малых постоянных.
Подставив
передаточную функцию регулятора в
схему, рассчитаем передаточную функцию
разомкнутой и замкнутой системы. Два
звена с малыми постоянными
![]() и
и
![]() могут быть заменены одним с постоянной
могут быть заменены одним с постоянной
![]() .
.
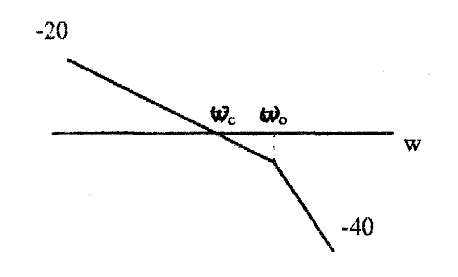
Передаточная функция разомкнутой системы
![]() .
.
![]() ;
;
![]()
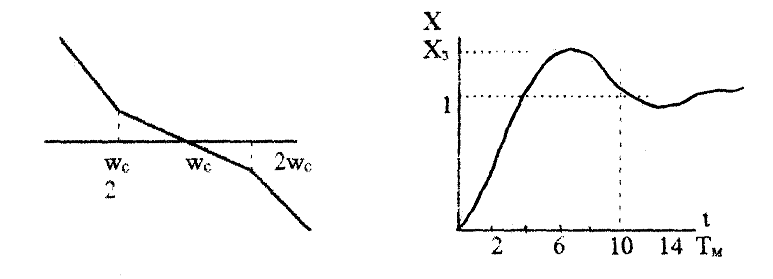
Здесь изображена ЛАЧХ разомкнутого контура.
Передаточная функция замкнутого контура будет:
![]() .
.
Известно, что передаточная функция звена второго порядка в общем виде следующая:
![]() .
.
Здесь ![]() - постоянная времени,
- постоянная времени,
![]() - коэффициент демпфирования.
- коэффициент демпфирования.
Приравнивая
коэффициенты при равных степенях
![]() ,
получим
,
получим
![]() ;
;
![]() ;
;
![]() .
.
Отсюда
![]() .
.
Переходная
характеристика колебательного звена
при
![]() =0,707
показана на рисунке.
=0,707
показана на рисунке.
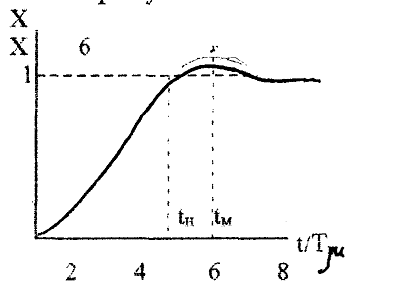
Такая настройка называется оптимизацией по модульному оптимуму (Betragsoptimum у И. Кесслера) и очень часто применяются в технике.
У такой передаточной функции модуль стремится к единице при стремлении частоты к бесконечности. Чем ближе модуль к единице, тем меньше динамическая ошибка регулирования. Для различных типов объектов оптимальными будут разные регуляторы:
а)
![]() ;
;
![]() .
.
Оптимален пропорционально-интегральный регулятор.
![]() ;
;
![]() ;
;
![]() .
.
б)
![]() ;
;
![]() .
.
Оптимален П -
регулятор:
![]() ,
формула та же, что и в предыдущем случае.
,
формула та же, что и в предыдущем случае.
в)
![]() ;
;
![]()
![]()
Оптимален ПИД - регулятор. Если в системе несколько малых постоянных, как в прямом, так и в обратном канале, то, согласно Д.С.Ямпольскому:
![]()
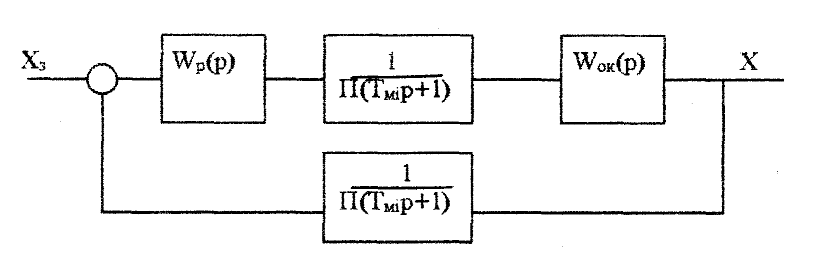
При оптимизации по модульному оптимуму поведение контура определяется суммой малых постоянных. При переходе к оптимизации следующего контура, внутренний уже оптимизированный, входит в состав объекта, внешнего и заменяется звеном с эквивалентной малой постоянной времени.
![]()
При этом пренебрегают
вторым порядком
![]() ,
в передаточной функции оптимизированного
контура.
,
в передаточной функции оптимизированного
контура.
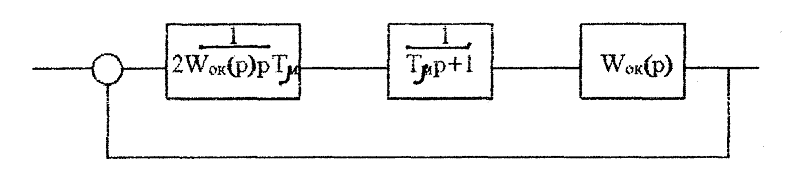
Кроме настройки на оптимум по модулю, часто встречается настройка на симметричный оптимум. Пусть имеется контур:

При настройке на модульный оптимум нужен П - регулятор с коэффициентом
![]() ;
;
![]()
Если использовать ПИ - регулятор с передаточной функцией:
![]() ,
,
причем
![]() ;
;
![]() (тот же коэффициент), то передаточная
функция замкнутого контура будет:
(тот же коэффициент), то передаточная
функция замкнутого контура будет:
![]()
Система будет вести себя как звено третьего порядка. ЛАЧХ симметрична относительно частоты среза.
Уменьшить
перерегулирование до 8% можно, введя в
канал задания фильтр с
![]() .
Коэффициент демпфирования в этом случае
будет тот же, что и в рассмотренном ранее
случае, то есть равен
.
Коэффициент демпфирования в этом случае
будет тот же, что и в рассмотренном ранее
случае, то есть равен
![]() .
Однако, быстродействие будет вдвое
ниже, так как при первой степени
.
Однако, быстродействие будет вдвое
ниже, так как при первой степени
![]() стоит коэффициент
стоит коэффициент
![]() (в рассмотренном ранее случае коэффициент
равнялся
(в рассмотренном ранее случае коэффициент
равнялся
![]() ).
).
Использование ПИ-регулятора позволяет получить двухкратноинтегрирующую систему с высоким быстродействием при отработке возмущений и отсутствии статической ошибки.