

Моделирование аср уровня металла в реальных величинах параметров
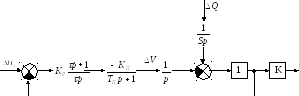
а) Управление стопором
Модель представлена на рисунке:

![]()
1
K![]()



![]()
![]()





![]()



![]()
![]()





![]()



![]()


Звено 6 для
установления нужной размерности
![]() (здесь
(здесь
![]() ,
то есть
,
то есть
![]() измеряется
в мм).
измеряется
в мм).
Пусть сечение
кристаллизатора 10см![]() 10
см = 100 см
10
см = 100 см![]() .
Скорость вытяжки 6 м/мин или 10 см/с.
Максимальный приток металла
.
Скорость вытяжки 6 м/мин или 10 см/с.
Максимальный приток металла
![]() =100
=100![]() 10
= 1000
10
= 1000
![]() .
.
Приток регулируется стопорным исполнительным механизмом, параметры которого определяются по формулам:
![]() ,
,
где
![]() - максимальный выход регулятора,
- максимальный выход регулятора,
![]() принять равной 0,1 – 0,5 с.
принять равной 0,1 – 0,5 с.
![]() .
.
Параметры регулятора определяются по формулам:
![]() ,
,
где
![]() - постоянная интегрирования, подлежащая
компенсации,
- постоянная интегрирования, подлежащая
компенсации,
![]() - малая постоянная контура,
- малая постоянная контура,
![]() - коэффициент датчика уровня.
- коэффициент датчика уровня.
![]() .
.
![]()
![]() .
.
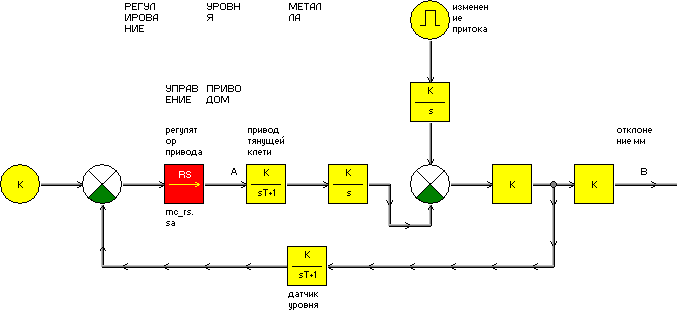
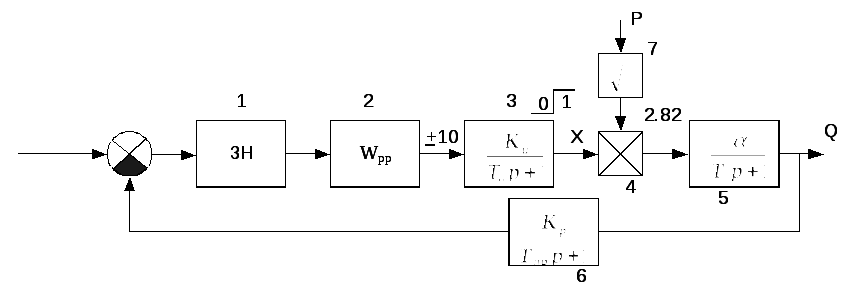
Модель примет вид (KRIST_RQ.DTM, KRIST_RQ.sa).
1
K
10![]()



![]()
![]()




![]()
![]()



![]()
![]()








-10





![]()

Моделируется 2 режима:
1.
![]() =0;
=0;
![]() =0
=0
2.
![]() =0;
=0;
![]() =1
cм/c
(10 %)
=1
cм/c
(10 %)
Шаг моделирования 0,01 с
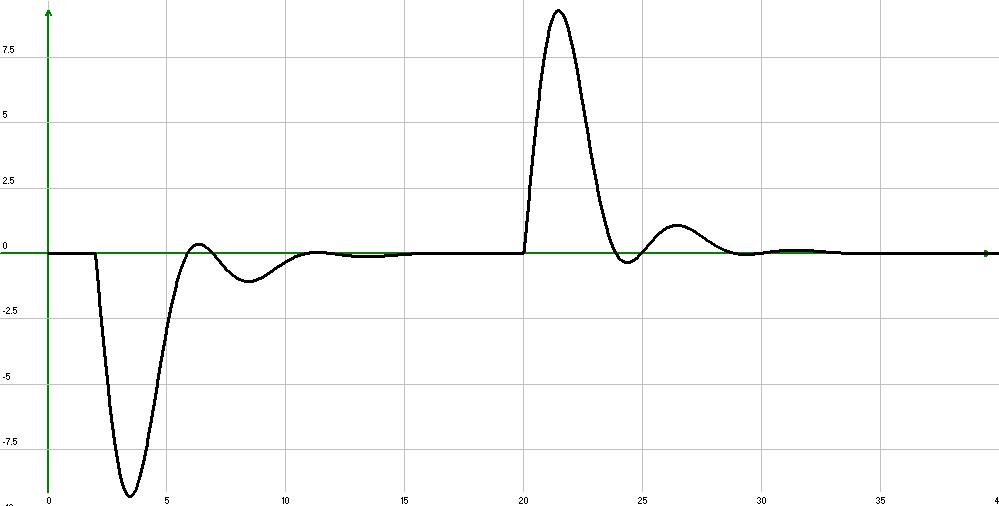
Увеличение скорости компенсируется увеличением притока металла. Уровень отклоняется вниз, но потом восстанавливается. Динамическое отклонение около 14 мм.

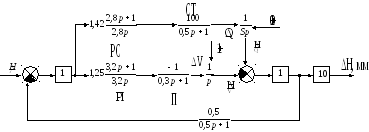
б) Управление приводом тянущей клети
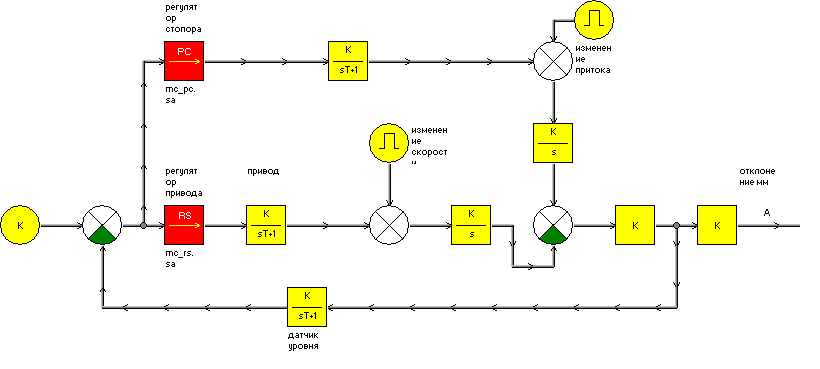
Модель на рисунке (KRIST_RV.DTM, KRIST_RV.sa)
![]()
В этом случае
исполнительным механизмом является
привод тянущей клети. Примем
![]() =0,3
с,
=0,3
с,
![]() =10/10=1
(
=10/10=1
(![]() см/с,
см/с,
![]() =10
В).
=10
В).
Тогда![]() ;
;
![]() с.
с.
Моделируется 2 режима:
1.
![]() =0;
=0;
![]() =0
=0
2.
![]() =0;
=0;
![]() =100
(10 %
=100
(10 %
![]() )
)
Увеличение притока металла компенсируется увеличением скорости.

Комбинированное управление (KR_QV.DTM, KRIST_QV.sa) повышает качество регулирования за счет одновременной работы двух каналов стабилизации уровня. Отклонение уровня при тех же возмущениях составляет около 9мм.
Регулирование охлаждения кристаллизатора унрс
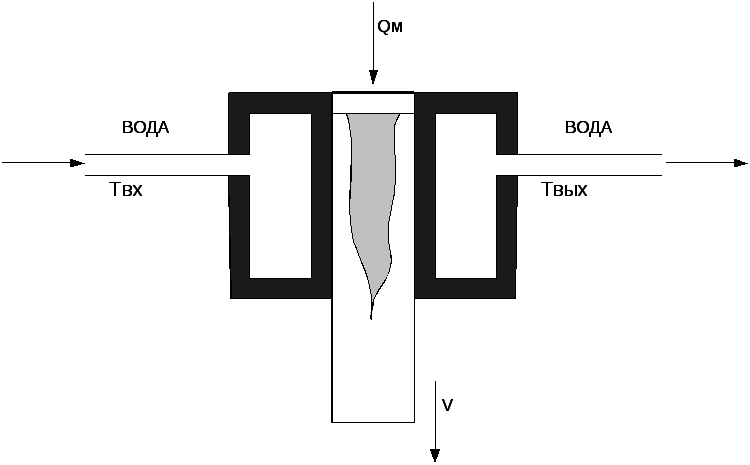
Кристаллизатор является водоохлаждаемым объектом. На вход системы охлаждения поступает вода с температурой Т0 и расходом Q. Пройдя через систему охлаждения, вода приобретает температуру ТВ. Задача системы регулирования состоит в том, чтобы обеспечить такое количество воды, которое не дало бы нагреться кристаллизатору до температур, недопустимых по технологическим ограничениям. При этом температура воды на выходе не должна быть больше 70-80 0С, так как закипание воды недопустимо. Оптимальный перепад температуры воды на входе и выходе Т примерно 10-15 0С.
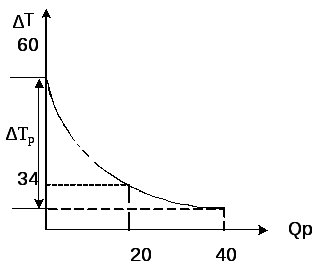
Статическая характеристика объекта, связывающая расход воды Q и перепад температур Т= ТВ- Т0 представлена на рисунке.
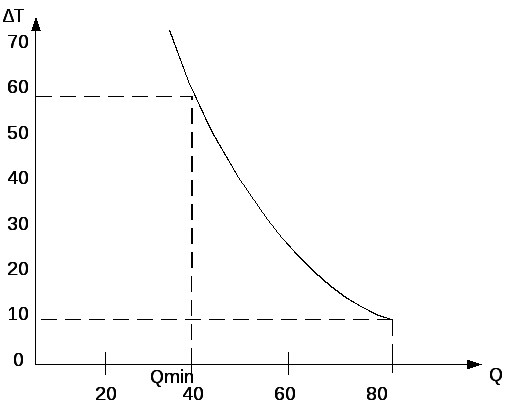
Анализ характеристика показывает, что расход воды меньший чем Qmin недопустим, так как температура на выходе будет слишком высокой и Qmin следует считать минимальным (нерегулируемым) расходом, который должен обеспечивается в любом случае. Для того, чтобы обеспечить безопасную работу, расход увеличивается за счет регулируемой составляющей Qp=Q-Qmin, снижающей выходную температуру воды и, соответственно перепад Т.
Д инамическая
характеристика (переходная) приведена
ниже.
инамическая
характеристика (переходная) приведена
ниже.
Обработка данных показала, что объект представляет собой звено второго порядка с запаздыванием.
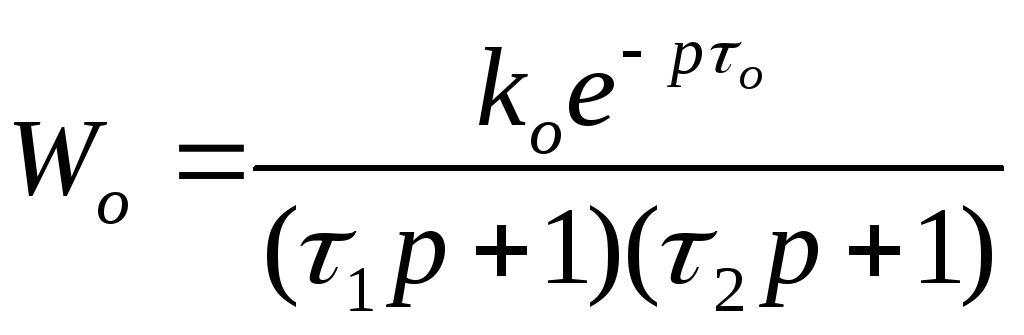
При этом
![]() ,
так как теплоемкость меди (стенки
кристаллизатора) много меньше теплоемкости
воды. Без большой ошибки можно
аппроксимировать объект инерционным
звеном с запаздыванием.
,
так как теплоемкость меди (стенки
кристаллизатора) много меньше теплоемкости
воды. Без большой ошибки можно
аппроксимировать объект инерционным
звеном с запаздыванием.
![]()
Время запаздывания
![]() составляет примерно 5÷6 сек., постоянная
составляет примерно 5÷6 сек., постоянная
![]() около 20÷30 сек. Среднее значение k
определяется по формуле:
около 20÷30 сек. Среднее значение k
определяется по формуле:
![]()
Коэффициент k имеет отрица-тельный знак.
Вода в кристаллизатор подается под давлением. Среднее давление около 8 атм. (8 кг/см2). Расход воды около 300 м3/час (80 лит. в сек).
Задача системы регулирования заключается в подаче такого количества воды, которое обеспечивало бы оптимальный температурный режим кристаллизатора и перепад температуры воды в диапазоне 10-15 0С.
При разработке системы регулирования и её структурной схемы использовался следующий подход. Общее количество воды представляется суммой двух составляющих: Qmin – минимальное количество воды, при котором перепад температуры воды максимален и равен 50-60 0С (при температуре на входе 10-30 0С это соответствует 60-90 0С на выходе) и Qp – регулируемая добавка, снижающая этот перепад до оптимальных 10-15 0С. Чем больше Qp, тем меньше перепад температур и тем больше уменьшение перепада относительно максимального. Пусть Т0- температура воды на входе, Тв – температура на выходе при минимальном Qmin, Твр – температура воды на выходе, соответствующая регулируемому дополнительному расходу Qp.
Представим объект
в АСР в виде двух звеньев, одно из которых
отражает динамику, а второе - статическую
характеристику, связывающую величину
снижения температуры от максимальной
![]() и дополнительному расходу Qp.
и дополнительному расходу Qp.

Эта
характеристика получена из зависимости
![]() ,приведенной
выше. Точные данные должны определяться
на конкретном объекте экспериментально.
Пусть при Q=Qmin=0.5Qmax=40
л/c
(Qp=0)
перепад составляет 600С,
,приведенной
выше. Точные данные должны определяться
на конкретном объекте экспериментально.
Пусть при Q=Qmin=0.5Qmax=40
л/c
(Qp=0)
перепад составляет 600С,![]() .
Тогда при повышении расхода до Q=Qmax=80
л/c,
то есть Qp=40
л/с перепад составит 100С,
т.е.
.
Тогда при повышении расхода до Q=Qmax=80
л/c,
то есть Qp=40
л/с перепад составит 100С,
т.е. ![]()
![]()

Структурная схема выглядит следующим образом.
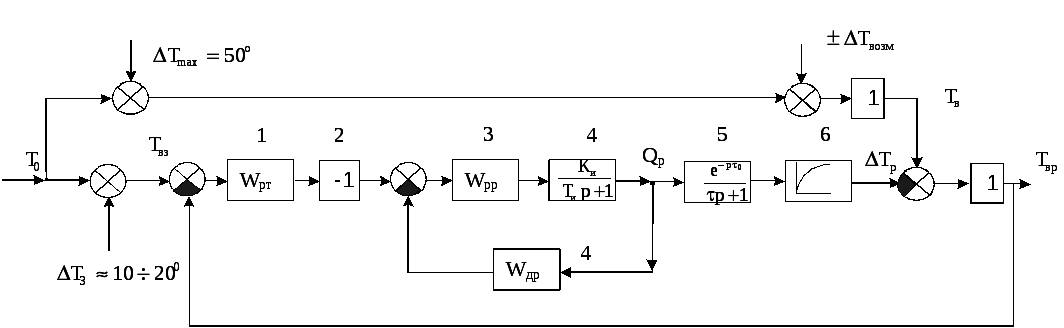
Здесь: Ки=Qp/Up=40/10=4, Tu=1c,
Wдр=Kдр/Tдрp+1;
Кдр=10/40=0.25;
Тдр=0,5,
![]() ,
,![]()
По модели можно рассчитать регуляторы и проверить работоспособность системы.
а) Расчет контура расхода воды
![]() ;
;
![]() ;
;
Кдр
![]() ;
;
Тu=Tдр=0.5; Т=3
![]()
![]()
![]() ;
;
![]()
![]()
(файл KR_OX.DTM (KR_OX.SA)) (mc_piras.sa)
б) Расчет контура температуры
Передаточная функция внутреннего контура
![]()
![]() (усредненный
коэффициент объекта)
(усредненный
коэффициент объекта)
![]()
![]()
![]()
(mc_rt.sa)
(krist_oxl.sa)
Модель АСР в программе «Анализ систем 3.1» представлена на рисунке. Результаты приведены ниже. Принято значение T0 = 20 °C, T3 = 15 °C, то есть TВ = 35 °C.При возмущении по T на 10 °C и последующем возмущении по давлению воды на 2 атм. система обеспечивает стабилизацию по температуре на заданном уровне.
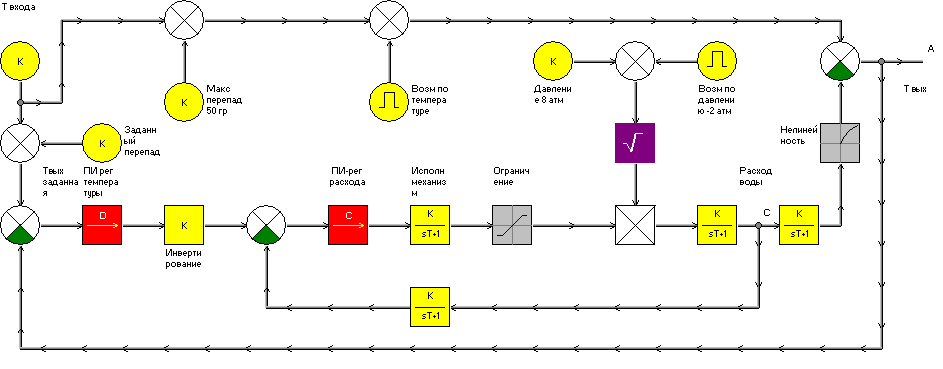
Структура модели АСР температуры кристаллизатора
1
2


Результаты расчета по модели
1 - температура воды на выходе кристаллизатора (°C), 2 - расход воды (л/с)