

Модель кристаллизатора унрс по каналу регулирования уровня
Кристаллизатор
имеет прямоугольное или квадратное
сечение площадью
![]() и высотой
и высотой
![]() .
Из промежуточного ковша поступает
металл с секундным объемом
.
Из промежуточного ковша поступает
металл с секундным объемом
![]() .
Металл вытягивается тянущей клетью со
скоростью
.
Металл вытягивается тянущей клетью со
скоростью
![]() .
Уровень будет постоянен, если объем
поступающего металла равен объему
вытянутого за это же время слитка.
.
Уровень будет постоянен, если объем
поступающего металла равен объему
вытянутого за это же время слитка.
О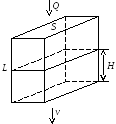 пределим
передаточные функции кристаллизатора
по каналам подачи и вытяжки металла.
Пусть за время
пределим
передаточные функции кристаллизатора
по каналам подачи и вытяжки металла.
Пусть за время
![]() в кристаллизатор поступит объем металла,
равный
в кристаллизатор поступит объем металла,
равный
![]() .
За это время уровень металла изменяется
на величину
.
За это время уровень металла изменяется
на величину
![]() .
.
Скорость изменения
уровня
![]() будет равна
будет равна
![]() .
.
В операторной
форме
![]() .
.
Считая входом
![]() ,
а выходом
,
а выходом
![]() ,
получим
,
получим
![]() .
.
По каналу вытяжки уровень будет изменяться по очевидному соотношению:
![]() .
.
В операторной форме:
![]() ;
;
![]() .
.
Модель объекта
представлена на рисунке. В неё также
включены упрощенные до инерционных
звеньев привода стопорного устройства,
регулирующего
![]() ,
и тянущей клети, регулирующего
,
и тянущей клети, регулирующего
![]() .
.

Здесь
![]() - напряжение
управления стопором,
- напряжение
управления стопором,
![]() ,
,
![]() - соответственно коэффициент и постоянная
стопорного устройства,
- соответственно коэффициент и постоянная
стопорного устройства,
![]() - напряжение
управления приводом,
- напряжение
управления приводом,
![]() ,
,
![]() - коэффициент и постоянная привода
тянущей клети.
- коэффициент и постоянная привода
тянущей клети.
Режим ручного управления при предварительном заполнении кристаллизатора можно промоделировать.
Пусть кристаллизатор
имеет сечение
![]() =10
=10![]() 10
см и высоту 100 см. скорость вытяжки 6
м/мин или 10 см/с. Тогда
10
см и высоту 100 см. скорость вытяжки 6
м/мин или 10 см/с. Тогда
![]() =100
=100![]() 10=1000.
Примем
10=1000.
Примем
![]() ,
соответствующий этой подаче металла,
равным 8 В. Тогда
,
соответствующий этой подаче металла,
равным 8 В. Тогда
![]()
![]() .
Аналогично
.
Аналогично
![]()
![]() .
Пусть
.
Пусть
![]() .
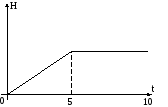
Моделируется 2 последовательных режима:
.
Моделируется 2 последовательных режима:
-
 =0,
=0,
 =8,
=8,
 =5
с
=5
с
 =0,01
=0,01 -
 =8,
=8,
 =8,
=8,
 =5
с
=5
с
Первый режим – включение подачи металла, а второй – включение тянущей клети. Результаты на графике:
Регулирование уровня можно осуществлять изменением подачи металла или изменением скорости вытяжки.
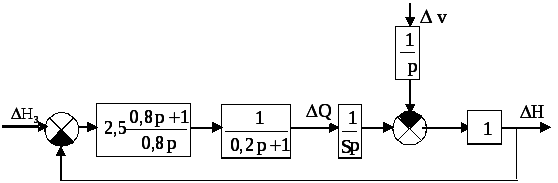
Первая схема АСР имеет следующий вид:
Пусть
![]() равны 1 (для простоты). Тогда
равны 1 (для простоты). Тогда
![]() ;
;
![]() .
.
Для астатизма по
возмущению используем не П-, а ПИ-регулятор
с постоянной времени
![]() .
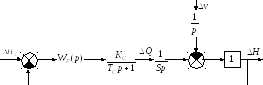
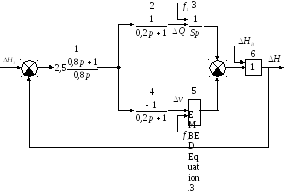
Модель примет вид (KRIST_Q.DTM):
.
Модель примет вид (KRIST_Q.DTM):
Моделируется 2 режима:
-
 =0,
=0,
 =0,
=0,
 =0,2
с
=0,2
с
 =0,01
=0,01 -
 =0,
=0,
 =0,1,
=0,1,
 =4
с
=4
с
Здесь
![]() - отклонение от уровня, установленного
в ручном режиме.
- отклонение от уровня, установленного
в ручном режиме.
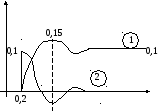
Результат на графике:
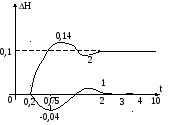
Из графика видно,
что при отклонении скорости на
![]() ,
уровень падает на величину 0,04, а потом
восстанавливается. График 2 соответствует
режимам: 1.
,
уровень падает на величину 0,04, а потом
восстанавливается. График 2 соответствует
режимам: 1.
![]() =0,
=0,
![]() =0;
2.
=0;
2.
![]() =0,1,
=0,1,
![]() =0,
то есть отработке изменения задания.
=0,
то есть отработке изменения задания.
Вторая АСР имеет вид (KRIST_V.DTM):
![]()

![]()

![]()
![]()
![]()
1

![]()
![]()





![]()






Сохраняя отрицательную
обратную связь, следует инвертировать
выход регулятора, то есть в модели
![]() должен быть отрицателен (возможна смена
знака и в других местах модели). Считая,
что параметры модели те же, то есть равны
1, получим тот же регулятор и те же
переходные процессы при условии
должен быть отрицателен (возможна смена
знака и в других местах модели). Считая,
что параметры модели те же, то есть равны
1, получим тот же регулятор и те же
переходные процессы при условии
![]() .
(Смена знака в модели объясняется тем,
что увеличение
.
(Смена знака в модели объясняется тем,
что увеличение
![]() приводит к росту уровня, а увеличение
приводит к росту уровня, а увеличение
![]() - к уменьшению.)
- к уменьшению.)
При комбинированном управлении модель следующая (KRIST_QV.DTM):
Моделируется обработка заданного уровня (график 1).
-
 =0;
=0;
 =0;
=0;
 =0,2
с
=0,2
с -
 =0,1;
=0,1;
 =0;
=0;
 =3
с
=3
с
Моделируется обработка возмущения (график 2).
-
 =0;
=0;
 =0;
=0;
 =0,2
с
=0,2
с -
 =0;
=0;
 =0,1;
=0,1;
 =3
с
=3
с
При отработке
возмущений
![]() и
и
![]() отдельно по притоку и по скорости
величина динамического отклонения при
той же величине возмущения уменьшается
примерно до уровня 0,02, то есть вдвое.
При этом уменьшается и время восстановления
уровня.
отдельно по притоку и по скорости
величина динамического отклонения при
той же величине возмущения уменьшается
примерно до уровня 0,02, то есть вдвое.
При этом уменьшается и время восстановления
уровня.