

21 Определение скорости начала хордового положения экипажа
Рассмотрим момент времени, когда экипаж уже занял хордовое положение, но Y2= 0.
Расчетная схема

Уравнение сил, действующих на заднее колесо, имеет вид
(П+∆П)*f*cosα=C-C’
Где

После подстановки исходных данных получаем уравнение вида

После преобразований получим:

При учете возвышения наружного рельса (h=0):
Без учета возвышения внешнего рельса (h= 0) (написать).
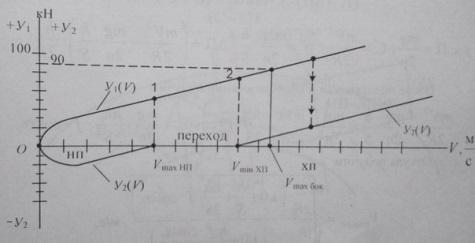
При всех скоростях Vхп≥Vminхп положение экипажа в кривой заданного радиуса будет оставаться хордовым.
Подставляя последовательно выбранные значения V > Vminхп в выражения для Y1 полученные для хордового положения, найдем величины Y1 при этих V.
Значения Y2 при этих же значениях V получим, решая уравнение сил хордового положения экипажа: Y1-Y2=C-C’, откуда Y2=(C-C’)-Y1
23 Сила, действующая на заднюю колесную пару при наибольшем перекосе
Положение
экипажа, схема действующих на него сил
и сил, действующих на заднюю колесную
пару со стороны внутреннего рельса:
 В
этих схемах
В
этих схемах ;
; ;
;
 ;
; ;
;
С
учетом этих формул составим уравнение
сил, действующих на заднее колесо:
 ;
;
 В
данном случае ясно, что только приY2
> 0 возможно положение наибольшего
перекоса.
В
данном случае ясно, что только приY2
> 0 возможно положение наибольшего
перекоса.
Следовательно,
оно возможно при соблюдении условия:
 при
при т.е с учетом возвышения внешнего рельса.
т.е с учетом возвышения внешнего рельса.
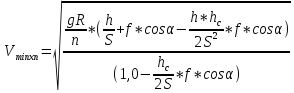
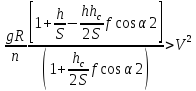
24 Безопасность движения экипажа в кривой.«Всползание» направляющего колеса на поверхность головки внешнего рельса.
Безопасность в кривой. Необходимо строго соблюдать ограничение скорости.( превышение приведет к сходу). Основные причины схода: 1)Всползание направляющего колеса, т.е. выход его на поверхность головки внешнего рельса 2)Боковое отжатие внешнего рельса. 3)Опрокидывание эккипажа.
«Всползание» может возникнуть только при большой скорости движения, когда экипаж занимает хордовое положение и направленная вверх подъемная сила Nz может превысить вертикальное давление направляющего колеса на рельс по кругу катания ( точка А).
Под действием центробежной силы N, направляющее колесо получает вторую, дополнительную точку М контакта с рельсом между внешней гранью гребня бандажа и внутренней боковой гранью головки рельса. Точка контакта колеса с рельсом А осуществляется на поверхности головки рельса по кругу катания. Контактирующая в точке М поверхность гребня бандажа имеет наклон под углом β ≈ 65° к горизонту. Поэтому боковая реакция Ny со стороны наружного рельса на гребень колеса перпендикулярна к общей касательной и образует: перпендикулярную к продольной оси экипажа горизонтальную силу Ny (она и является направляющей Yн = Y1) и вертикальную составляющую Nz, фактически и образующую «подъемную» силу, способствующую процессу «всползания» направляющего колеса на поверхность внешнего рельса. В точке А на колесо действуют силы: горизонтальная составляющая силы трения (П + ∆П)*f*cosα1 , возникающая вследствие поворота экипажа в кривой на угол α, и скольжение. В центре тяжести О на экипаж действует центробежная сила (C – C ′), создающая дополнительное вертикальное давление ∆П набегающего колеса на рельс.
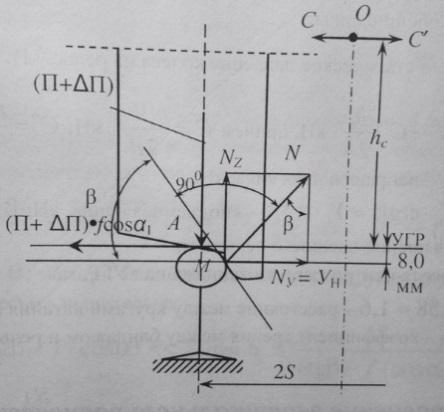
Таким
образом, на направляющее колесо при
движении в кривой действуют следующие
силы:
 – статическое давление колеса.
– статическое давление колеса.

 Yн=Y1
– направляющая сила. Nz=Yн*ctgβ
– подъемная сила. h-
возвышение внешнего рельса. hc
– высота центра тяжести экипажа над
УГР. 2S-расстояние
между кругами катания. f=0.25
–коэффициент трения между бандажом и
рельсом.
Yн=Y1
– направляющая сила. Nz=Yн*ctgβ
– подъемная сила. h-
возвышение внешнего рельса. hc
– высота центра тяжести экипажа над
УГР. 2S-расстояние
между кругами катания. f=0.25
–коэффициент трения между бандажом и
рельсом.