

15 Свободные вертикальные колебания системы с одной степенью свободы с учетом силы сопротивления

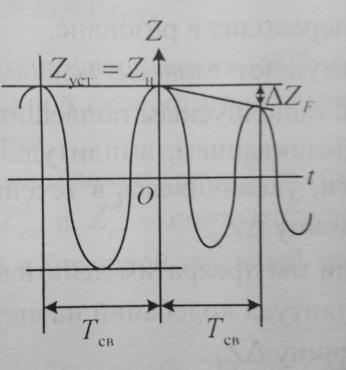
При заданных начальных условиях и при отсутствии сил сопротивления М будет совершать незатухающие синусоидальные колебания с амплитудой Zn=ZУСТ м круговой частотой k=(Ж/М)^(1/2), то есть вида Z=Znsin(kt) с периодом свободных колебаний Тсв=2π/k
При введении в систему сил сопротивления F(t) характер колебаний может резко измениться в зависимости от величины силы сопротивления. Прежде всего колебания будут затухающими. Их амплитуда будет уменьшаться в течении некоторого периода ΔZF.
Основное условие выбора необходимой силы сопротивления гасителя колебаний в системе рессорного подвешивания
При отсутствие сил сопротивления в системе рессорного подвешивания под воздействием возмущающей силы подрессоренное строение совершает синусоидальные колебания с двумя частотами:
1 Вынужденные с круговой частотой возмущающей силы p=2πV/L, где L – длина повторяющейся неровности
2
Свободные колебания с круговой частотой

Если
прекратить действие возмущающей силы
и ввести силу сопротивления, то амплитуда
колебаний начнёт изменятся на величину
 .
Если в режиме резонанса одновременно
действуют сила сопротивления и
возмущающая сила, то будет происходить
.
Если в режиме резонанса одновременно
действуют сила сопротивления и
возмущающая сила, то будет происходить ↓,
↓, ↑,
↑, .
Если результирующее изменение амплитуды
=0, то наступит устойчивый колебательный
процесс.
.
Если результирующее изменение амплитуды
=0, то наступит устойчивый колебательный
процесс. =
= – главное условие устойчивого
колебательного процесса при резонансе.
– главное условие устойчивого
колебательного процесса при резонансе.
17 Работа возмущающей силы за один период колебаний в резонансном режиме
Значение
периодической силы:

В режиме резонанса р=к, работа за один период колебаний:

Вертикальные перемещения описаны:


 и
и

Пусть
 =>
=>

Работа силы сопротивления за один период колебаний в резонансном режиме
В
качестве источника сил сопротивления
используют гидравлический гаситель
колебаний с силой сопротивления

 –коэфф сопротивления
гидравл.колебания
–коэфф сопротивления
гидравл.колебания

Работа
колебаний определяется:



Коэффициент сопротивления гидравлического гасителя колебаний
Т.к.
установившейся процесс колебаний
амплетудой Zуст
может быть
достигнуто только при равенстве работ
Rp
и RF
. Необходимый параметр гаситеся колебаний
определяется из уравтения:
 .
. ,
,
H-амплитудное значение возмущающей силы.
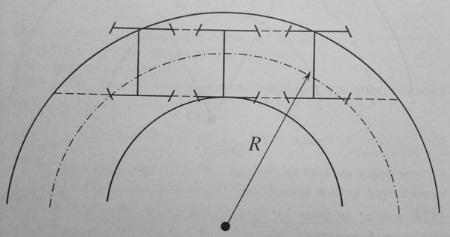
18 Основные факторы, затрудняющие движение экипажа в кривой, и способы их устранения
1 Жесткая посадка колес на ось колесной пары. Вследствие этого для внутренних и внешних колес неизбежно проскальзывание, сопровождающееся дополнительными силами трения.
2 Колесные пары, расположенные в одной жесткой раме, установленной параллельно друг другу, что вызывает дополнительное проскальзывание и появляется сила трения от набегания на рельс.
3 Заклинивание экипажа в кривой. Положение заклинивания – когда крайние колесные пары своими гребнями бандажей касаются внешнего рельса, а одна из промежуточных КП касается гребнем внутреннего рельса. Радиус кривой, в которой возможно заклинивание – радиус заклинивания, имеет место при R<=100–110
Основные меры обеспечивающие прохождения экипажа в кривой
1) создание возможных поперечных смещений КП относительно рельсы в пределах установленного норм путем применения балластных поводковых букс
2) применение конусной поверхности катания бандажей колес. Внешнее колесо проходит больший путь при одинаковом числе оборотов с внутренним колесом, что уменьшает проскальзование колес по рельсам
3) применяется смазывание гребней КП.
4) уменьшение жесткости базы путем уменьшения числа КП в одной раме
5) Применение в искл. случаях безреберных колес для промежуточных КП.