

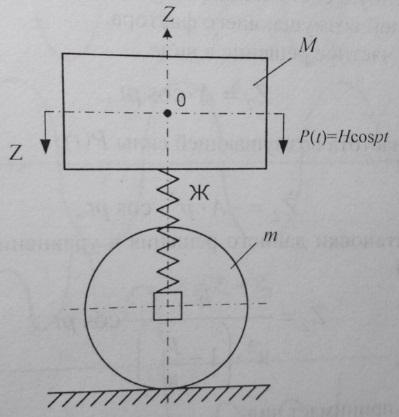
7 Вынужденные вертикальные колебания экипажа с одноярусным рессорным подвешиванием
Колебания происходят в результате действия периодически повторяющейся во времени силы P(t)/
Уравнения колебаний


Полное
решение уравнения такого вида будет
состоять из суммы общего решения
однородного уравнения Z1
и частного Z2.
Частное решение Z2 характеризует вынужденную составляющую колебаний
 ,
где p
– круговая
частота возмущающей силы P(t).
,
где p
– круговая
частота возмущающей силы P(t).

 ,
где Z1
– свободные колебания, а Z2
– вынужденные.
,
где Z1
– свободные колебания, а Z2
– вынужденные.
Под действием внешней периодически повторяющейся силы Р надрессорное строение совершает сложные колебательные движения, являющиеся результатом действия друг на друга свободных и вынуждающих колебани. При этом свободные колебания имеют частоту k=const, частота вынужденных колебаний определяется частотой возмущающей силы p≠const.
9 Свободные вертикальные колебания систем с двумя степенями свободы

Z1, Z2 – координаты вертикальных перемещений центров тяжести масс кузова и подресс. частей тележки.
Уравнение колебаний кузова:


 –уравн. колебан.
подрессорен. части.
–уравн. колебан.
подрессорен. части.




K1,K2,K3-состовляющие порциальные частоты вертикальных колеб.
Решения уравнений:


 –частоты сложного
процесса свободных колебаний
–частоты сложного
процесса свободных колебаний

Как и в экипаже с 1-ярусным подвешиванием. частоты свобод. чолеб. зависят только от инерции и упругих параметров сис-мы. В процессе колебаний подресор. массы совершают вертикальные перемещения с амплитудой А и В одновременно, т.е. происходит наложение колебаний друг на друга.

11 Свободные колебания галопирования.
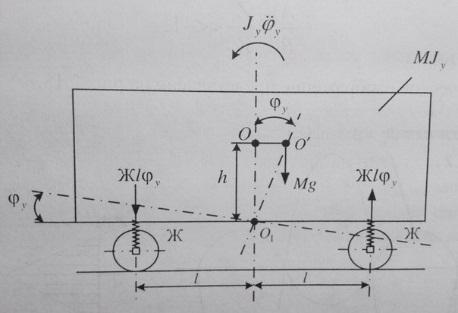
Уравнения свободных колебаний:

 -момент
инерции надрессор. строения относительно
горизонтальной поперечной оси y,
k2г
- квадрат
круговой частоты свободных колебаний
галопирования.
-момент
инерции надрессор. строения относительно
горизонтальной поперечной оси y,
k2г
- квадрат
круговой частоты свободных колебаний
галопирования.

2l
-жёсткая
база экипажа. Ж-
жёсткость рессорного подвешивания,
отнесённая к одной колесной паре.
h-высота
центра тяжести надрессор. строения над
верхней плоскость рессорного подвешивания.
 -угол
поворота надрессор. строения вокруг
осиy.
-угол
поворота надрессор. строения вокруг
осиy.
Свободные колебания боковой качки.

 -момент
инерции надрессор. строения относительно
оси X.
2b
-расстояние
между осями рессорных комплектов
колесной пары.
-момент
инерции надрессор. строения относительно
оси X.
2b
-расстояние
между осями рессорных комплектов
колесной пары.
 -угол
поворота надрессор. строения вокруг
осиx.
k2бк
- квадрат
круговой частоты свободных колебаний
боковой качки.
-угол
поворота надрессор. строения вокруг
осиx.
k2бк
- квадрат
круговой частоты свободных колебаний
боковой качки.
Уравнение свободных колебаний:


Решение:

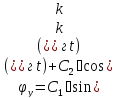
12 Свободные колебания виляния
Общая схема движения отдельной КП в горизонтальной плоскости вдоль оси пути
Где
 - зазор между внешней гранью гребня
бандажа и внутренней гранью рельса в
прямом участке пути,Ru
– радиус кривизны извилистого движения.
- зазор между внешней гранью гребня
бандажа и внутренней гранью рельса в
прямом участке пути,Ru
– радиус кривизны извилистого движения.
Благодаря конусности круга катания колеса и наличию зазора, колесная пара стремится занять в рельсовой колие среднее положение, совершая перемещение в поперечной плоскости. При этом центр тяжести КП описывает криволинейную траекторию с переменным радиусом кривизны извилистого движения.
Наиболее благоприятные для возникновения колебаний виляний является режим экипажа на выбеге в прямом и горизонтальном участке пути.
Схема расположения КП в рельсовой колее на прямом участке пути:
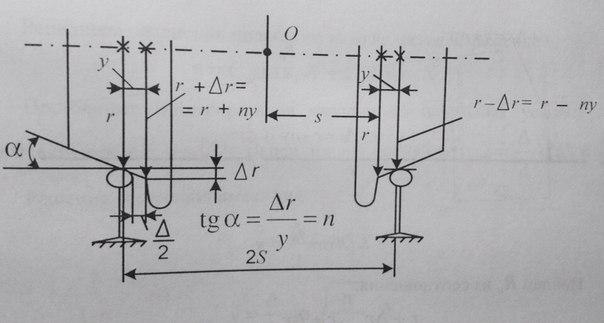
2S – расстояние между кругами катания колес, r – радиус кругов катания.
Ru=S*r/(n*y)
Период извилистого движения КП:
