

34 Силы, возникающие при работе тягового привода III класса

Опорно-рамное подвешивание тягового двигателя и редуктора. Передача момента от вала якоря к КП осуществляется посредством полого вала, охватывающего ось КП и 2ух шарнирно-поводковых муфт. Перемещение рамы тележки относительно оси КП обеспечивается зазором между осью и полым валом.
Расчетная схема тяг.привода 3 класса.
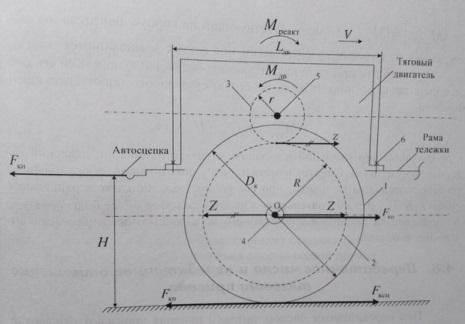
Lдв, Dk,R, r-база двигателя, диаметр круга катания движущего колеса, радиусы зубчатого колеса и шестерни, м
Н- высота оси автосцепки над уровнем головок рельсов, м
О- центр оси КП и зубчатого колеса
1 Движущее колесо 2 Зубчатое колесо, посаженное на вал 3 Шестерня редуктора, посаженная на вал якоря 4 Полый вал, установленный и вращающийся в подшипниках корпуса тяг.двигателя 5 Вал якоря тяг.двигателя 6 Крепление тяг.двиг. к раме тележки
Вращающий момент касательных сил на оси КП.
Mкп=Fкп*Dk/2, где Fкп – касательная сила на ободе движущего колеса
К полому валу приложена сила Z, направленная направо. Нормальное качение колеса по рельсу без проскальзывания: Fкп≤Fксц. Если Fкп>Fксц, возникают условия для боксования. Fкп, приложенная к оси КП, через боксовый узел , раму тележки и автосцепку, передает усилие поезду, обеспечивая его поступательное движение. Надрессорное строение локомотива подвергается действию опрокидывающего момента.

│Мреакт│=│Мдв│- момент, действующий на корпус двигателя из-за его электромагнитной связи с вращ. Якорем. При наличии на локо n движущих осей его подрессоренная часть подвергается- Мопр=n*Fкп*Н, кНм, в продольной вертикальной плоскости, вызывая изм давлений КП на путь.
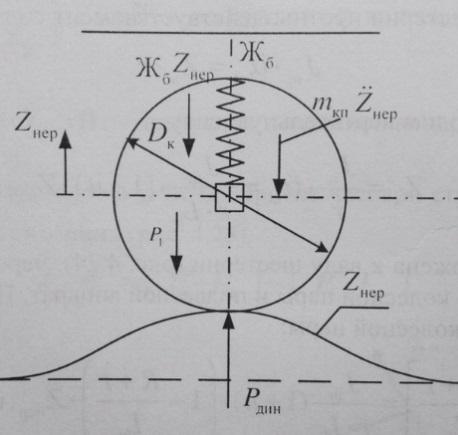
32 Динамика тягового привода II класса без учета вертикального перемещения подрессоренных масс тележки.
Т.к в приводе II класса присутствует упругая муфта, то нельзя считать, что центр тяжести редуктора совпадает с валом якоря. Расс-м случай, когда редуктор расположен за осью
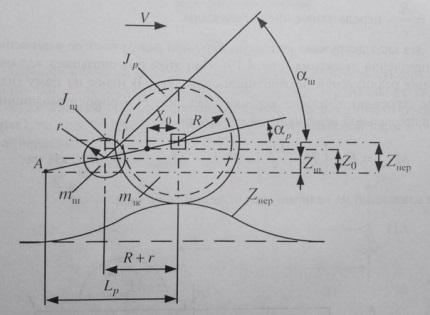
Zнер - величина неровности.
αp, αш - углы поворота редуктора и вала шестерни, вызванные неровностями.

Из
схемы следует, что
 ,
, ,
- расстояние центра тяжести от оси
колесной пары.
,
- расстояние центра тяжести от оси
колесной пары.
Вертикальная координата сила тяжести:
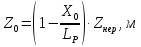
Из
рисунка видно, что вертикальные
перемещения колесной пары на величину
Zнер
можно расс-ть как результат двух
движения: верти-го перемещения центра
тяжести редуктора и поворота редуктора
вокруг центра тяжести на угол αp.
Вертикальному
перемещению массы редуктора будет
противо-ть сила инерции
 .
Повороту редуктора на угол αp
препятствует уже пара сил инерции.
.
Повороту редуктора на угол αp
препятствует уже пара сил инерции.
 ,
где Р1 – сила, кот догружает КП,Jр
– момент инерции редуктора относительно
центра тяжести.
,
где Р1 – сила, кот догружает КП,Jр
– момент инерции редуктора относительно
центра тяжести.
Вертикальная
сила при этом:
Результирующая вертикальная динамическая нагрузка на ось составит:
 (см. рис.)
(см. рис.)
37 Разгрузка движущих колесных пар. Понятие о коэффициенте использования сцепного веса локомотива.
Важнейшим показателем эксплуатационных качеств локомотива является сила тяги, которую он может реализовать по условиям сцепления движущих колес с рельсами при трогании с места, а также при движении с установившейся скоростью на расчетном подъеме.
Теория электрической тяги определяет эту силу как

где
 -
касательная сила тяги локомотива;
-
касательная сила тяги локомотива; –
сцепной вес локомотива;
–
сцепной вес локомотива; - число движущих осей;
- число движущих осей; - коэффициент сцепления локомотива; П
– средневзвешенное давление движущей
колесной пары на путь, кН;
- коэффициент сцепления локомотива; П
– средневзвешенное давление движущей
колесной пары на путь, кН;
Следует считать, что сила тяги электровоза лимитируется наиболее разгруженной колесной парой, имеющей уменьшенное по сравнению с номинальным давлением на путь. Таким образом, происходит неполное использование сцепного веса локомотива.
Для количественной оценки этого явления вводится понятие коэффициент использования сцепного веса.
Рассмотрим простейший экипаж – двухосный электровоз.

G
– вес электровоза, кН; В – база (расстояние
между крайними осями электровоза), м;
 –сила тяги, развиваемая одной осью,
кН;H
,
–сила тяги, развиваемая одной осью,
кН;H
,
 ,
, – соответственно высоты автосцепки
над уровнем головок рельсов, центра
тяжести электровоза и центра тяжести
торцевой поверхности кузова, м;W
– сопротивление движению состава, кН;
– соответственно высоты автосцепки
над уровнем головок рельсов, центра
тяжести электровоза и центра тяжести
торцевой поверхности кузова, м;W
– сопротивление движению состава, кН;
 ,
, ,
, - силы сопротивления движению от
инерционных сил, приведенного и
спрямленного уклонов, а также от
воздушной среды, кН;
- силы сопротивления движению от
инерционных сил, приведенного и
спрямленного уклонов, а также от
воздушной среды, кН; и
и – вертикальные давления колесных пар,
кН;
– вертикальные давления колесных пар,
кН;
Как правило, в статическом состоянии
Тогда
 или
или
Где
 - изменение вертикального давления
колесной пары на путь.
- изменение вертикального давления
колесной пары на путь.

Причем

Здесь
 - величина для конкретного электровоза;
зависит лишь от его линейных параметров.
- величина для конкретного электровоза;
зависит лишь от его линейных параметров.
Следует
отметить, что

Сцепной
вес электровоза измениться не может,
а происходит его перераспределение
между колесными парами. Первая (по ходу)
колесная пара оказалась разгруженной
на величину
 ,
а вторая - перегрузилась на равную
величину
,
а вторая - перегрузилась на равную
величину .
.
В
рассматриваемом случае наиболее
разгруженной оказалась первая по ходу
колесная пара. Ее сцепной вес под
действием возникающих и действующих
сил и моментов уменьшается по сравнению
с номинальными ( статическим) на
величину
 F
.
F
.
Коэффициент использования сцепного веса колесной пары называется отношение давления наиболее разгруженной колесной пары на путь в рассматриваемых условиях к ее номинальному (статическому) давлению, то есть
 =1-
=1-

Где
 ;
; .
Тогда
.
Тогда ,
,
Где
 - коэффициент сцепления отдельной оси;
- коэффициент сцепления отдельной оси; - коэффициент приF
у наиболее разгруженной оси, имеющей
максимальное отрицательное
- коэффициент приF
у наиболее разгруженной оси, имеющей
максимальное отрицательное
 .
.