28 Опрокидывания экипажа в кривой. Двухъярусное рп
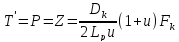
Процесс наклона экипажа в кривой при его движении. В начальный момент происходит поворот всей подрессоренной массы вокруг точки 02(лежащей в верхней плоскости буксовой ступени) на угол φ1.В результате центр тяжести кузова 01 переместиться на расстояния х1=(h1+hк)φ1.Опрокидывания произойдет при условии х1+х2>=b
Уравнения
подрессоренной массы mэ
(при повороте на угол φ1)имеет
вид:

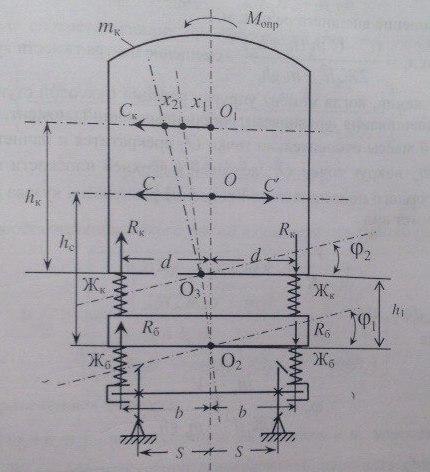
В момент упругих реакций буксовой ступени рессорного подвешивания уравновесит опрокидывающий момент, поворот подрессоренной массы относительно точки 02прекратиться и начнется поворот кузова mк вокруг 03(лежащей в верхней плоскости кузовной ступени рессорного подвешивания)
Уравнения равновесия кузова имеет вид:
Находим x2 , подставляя значения х1 и х2 в х1+х2>=b, находим Vопр с учетом и без учета наружного рельса.
hk, hc – высота центра тяжести экипажа и его кузова, h1 – расстояние от верхней плоскости буксовой ступени РП до пола кузова.
Устойчивость против опрокидывания экипажа с 2х ярусным подвешиванием
1. Повышается с уменьшением высоты центра тяжести и увеличения массы
2. Увеличивается при применении рам с внешними боковинами
3. Возрастает с увеличением жесткости рессорного подвешивания
26 Сход экипажа с рельсов из-за бокового отжатия внешнего рельса
Сущность явления бокового отжатия рельса:

При отклонении головки рельса в горизонтальной плоскости перпендикулярно продольной линии экипажа на некоторую величину ΔY даже при упругой деформации происходит увеличение ширины рельсовой колеи, что и может привести к "провалу" внутреннего колеса в междурельсовое пространство и таким образом стать причиной схода экипажа с рельсов.
В
настоящее время рекомендуется не
допускать величину
 =90
кН. При достижении или превышении этой
величины сход экипажа с рельсов
становится возможным.
=90
кН. При достижении или превышении этой
величины сход экипажа с рельсов
становится возможным.
Зная, что при h≠0:

Произведя
некоторые преобразования при
 =90
кН, найдем максимальную скорость, при
движении или превышении которой
безопасность движения в кривой не
обеспечивается
=90
кН, найдем максимальную скорость, при
движении или превышении которой
безопасность движения в кривой не
обеспечивается

при наличии возвышения внешнего рельса, т.е при h≠0
Направляющее
усилие
 может быть определено для любой скорости
движения из выражения
может быть определено для любой скорости
движения из выражения

при наличии возвышения внешнего рельса, т.е при h≠0.
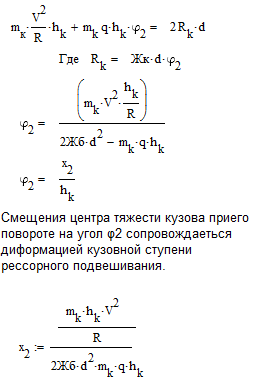
31 Силы, возникающие при работе тягового привода II класса
Рассмотрим ТП 2 класса, характеризуемый опорно-рамным подвешиванием ТЭД и опорно-осевым подвешиванием редуктора. Принципиальная схема ТП 2 класса с зубчатой муфтой 1, расположенной внутри полого вала якоря 2. Вращающий момент от якоря к валу малой шестерни 3 тягового редуктора передается посредством торсионного вала 4 и эластичной дисковой резинокордной муфты 5. Зубчатое колесо редуктора 6 жестко закреплено на оси КП 7, корпус редуктора 8 установлен на ось через подшипники качения.
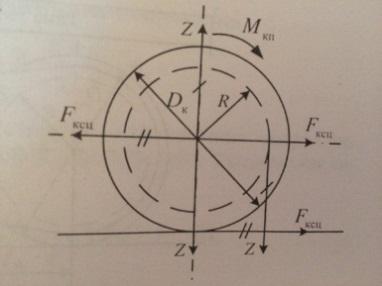
На
зубцы зубчатого колеса со стороны
шестерни действует вертикальная сила
Z,
приведем ее к центру оси, приложив здесь
равные, но противоположно направленные
силы Z.
Получаем момент, действ на ось КП:

При
норм условиях сцепления в точке контакта
колеса с рельсом возникает сила тяги,
определяемая усл сцепления Fксц,
которая
будет приложена к колесу и направлена
в сторону движения. Приведя эту силу к
оси КП, получаем пару сил с моментом
 , которая будет уравновешивать момент
, которая будет уравновешивать момент
Отсюда
следует, что
 и
и .
Такая вертикальная сила будет действовать
увеличивая (уменьшая) давление КП на
путь в зависимости от направления
движения локомотива. Сила, действ на
зубцы ЗК, может быть определена в
зависимости от скорости движения по
тяговой хар-ке и выбранного режима
движения.
.
Такая вертикальная сила будет действовать
увеличивая (уменьшая) давление КП на
путь в зависимости от направления
движения локомотива. Сила, действ на
зубцы ЗК, может быть определена в
зависимости от скорости движения по
тяговой хар-ке и выбранного режима
движения.
Приведя
силу Z
к центру вала шестерни, получим пару
сил, уравновешивающую действующий на
валу шестерни момент, развив на валу
якоря:

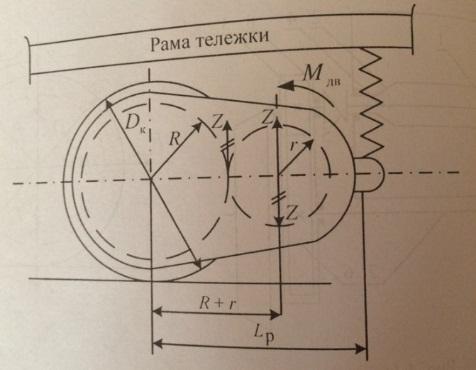
Одновременно на вал шестерни, а от него на редуктор (через подшипники вала шестерни) будет передаваться вертикальная сила Z. Т.к. редуктор опирается на ось и на раму, то сила Z распределяется между осью и КП и подвесным аппаратом

Lp-база редуктора
R+r-централь редуктора
Следовательно, Z=K+P и K*Lp=Z*[Lp-(R+r)]
Из двух этих уравнений видим, что сила:
 - действует на ось
колесной пары в направлении вверх, а
сила:
- действует на ось
колесной пары в направлении вверх, а
сила:
 (кН)- действует на
раму в направлении вверх, через подвесной
аппарат, а на ось КП действует вертикальная
сила:
(кН)- действует на
раму в направлении вверх, через подвесной
аппарат, а на ось КП действует вертикальная
сила: