

6 Свободные вертикальные колебания экипажа с одноярусным рессорным подвешиванием
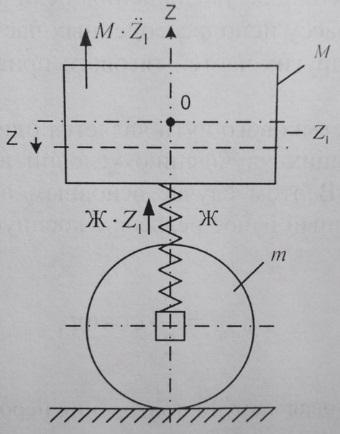
М – масса подрессоренных частей экипажа, Z – текущая координата вертикальных перемещений центра тяжести подрессоренных частей, Ж – жесткость упругого рессорного подвешивания (кН/м), m – масса неподрессоренных частей экипажа.
Пусть под воздействием единичного возмущения подрессоренная масса получит некоторую динамическую переменную Z1, что вызовет появление 2-х вертикальных сил: силы инерции (M*Z1) и упругие силы (Ж*Z1)
Под действием упругих сил система будет стремиться в исходное состояние.
Под действием сил инерции подрессоренная масса будет проскакивать положение равновесия, совершая периодические колебательные движения.
Уравнение
динамического равновесия системы:
 или
или ,
где
,
где – круговая частота, 1/с.
– круговая частота, 1/с.
1. Свободные колебания подрессоренной массы М носят синусоидальный характер с круговой частотой К. Эти колебания являются незатухающими, если в системе отсутствуют силы сопротивления (гасители колебаний).
2. Частота свободных незатухающих колебаний величина постоянная, зависящая только от инерционных и упругих переменных системы и не зависят от других условий.
3. Амплитуда свободных колебаний определяется параметрами системы и начальными условиями.
4 Центр упругости рессорного подвешивания
Центр упругости - точка ,лежащая в плоскости рессорного подвешивания, через которую проходит равнодействующая всех реакций упругих элементов, рассматриваемая системой.
Отличия эквивалентной точки подвешивания состоит в том , что через эквивалентную точку проходит тоже равнодействующая реакций упругих элементов, но только сбалансированных между собой.
Координаты центра упругости

На рис. точка 0 - центр упругости,отстоящая на расстояние Х0
Ma:
S0*X0=S1*X1+S2*X2+....+Sn*Xn
S=f*Ж
X0*f*∑Жi=Xi*f*Ж1+Х2*f*Ж2+....+Xn*f*Ж
Х0∑Жi=X1*Ж1+Х2*Ж2+...+Хn*Жn=∑Жi*Xi
 X0=
∑Жi*Xi
X0=
∑Жi*Xi
∑Жi
Свойства центра упругости
1.Если начальная координата расположена в центре упругости, то в этом случае Х0=0 ; ∑ЖiXi=0,при этом необходимое расстояние Хi следует брать с положительным знаком, при расстоянии рессорного комплекта справа от центра упругости.
2.Если упруго подвешенную частью подрессорного строения положить вертикальную силу, линия действия которой проходит через центр упругости, то подрессорное строение переместится параллельно самому себе на величину У ,которая определяет дефформацию (прогиб) рессорного комплекта.
3.Если на надрессорное строение действует вращающий момент или пара сил, то это подрессорное строение повернется на некоторый угол ф
4.Если надрессорное строение действует не центровая вертикальная сила К, то надрессорное строение повернется на некоторый угол ф относительно точки 0,находящийся на некотором расстоянии b от центра упругости.
2 Жесткость рессорного подвешивания РП и его прогиб В общей схеме РП его отдельные элементы могут быть объединены в группы с помощью вспомогат. элементов. В каждой такой группе элементы работающие под общей нагрузкой могут работать либо послед. либо паралл. В результате такой работы эти элементы взаимодействуют друг с другом конструктивно образуя тем самым эффективную эквивалентную рессору с эквивалентными жесткостями. Пример:
 где
Жл-жесткость
листовой рессоры ; Жв-жесткость
винтовой пружины
Рп-подрессорная
нагрука
Конструкция представляет
собой связанные упругие элементы
листовую рессору и винтовые пружины,
которые находятся под подрессорной
нагрузой. Эта нагрузка передается через
винтовые пружины в точке 1 и 2 и
распределяется отношение Рп/2 (поровну).
Далее нагрузка от каждой пружины
передается через соотв. подвеску на
листовую рессоре, рессора суммирует
эту нагрузку и передаёт её через хомут
рессорную стойку на буксу и далее на
рельс.
Таким образом элементы системы
участвуют в передаче нагрузки как одна
эквивалентная рессора
где
Жл-жесткость
листовой рессоры ; Жв-жесткость
винтовой пружины
Рп-подрессорная
нагрука
Конструкция представляет
собой связанные упругие элементы
листовую рессору и винтовые пружины,
которые находятся под подрессорной
нагрузой. Эта нагрузка передается через
винтовые пружины в точке 1 и 2 и
распределяется отношение Рп/2 (поровну).
Далее нагрузка от каждой пружины
передается через соотв. подвеску на
листовую рессоре, рессора суммирует
эту нагрузку и передаёт её через хомут
рессорную стойку на буксу и далее на
рельс.
Таким образом элементы системы
участвуют в передаче нагрузки как одна
эквивалентная рессора
 Точки
1 и 2 – точки действ. контакта надрессорного
строения с элементами подвешивания.
Точки
1 и 2 – точки действ. контакта надрессорного
строения с элементами подвешивания.