

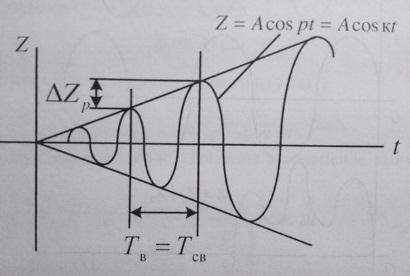
16 Увеличение амплитуды вертикальных колебаний за один период в резонансном режиме под действием периодической возмущающей силы


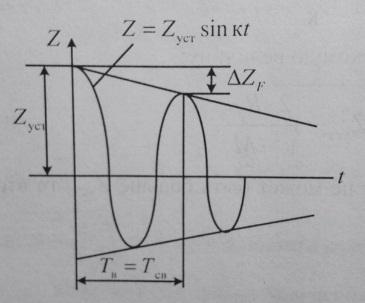
В режиме резонанса система совершает колебания синусоидального характера с одной из главных частот


Уравнения вынужд. колебаний:

Из решение:
Уменьшение амплитуды колебаний под действием силы сопротивления за один период при работе в резонансном режиме
Уравнение свободных колебаний в резонансном режиме при наличии в системе силы сопротивления F(t):

Из решения:
Основное условие обеспечения устойчивого колебательного процесса в режиме резонанса.
Устойчивый колебательный процесс в режиме резонанса (при движении с Vкр) может быть обеспечен, если увеличение амплитуды колебаний надрессорного строения за один период под действием вынуждающей силы будет компенсироваться уменьшением ее на такую же величину под действием силы сопротивления, то есть если будет достигнуто равенство ∆ Zp = ∆ZF.
Это равенство мы получим при условии равенства работ возмущающей силы P(t) и силы сопротивления F(t) за период колебаний, то есть если Rp = Rf
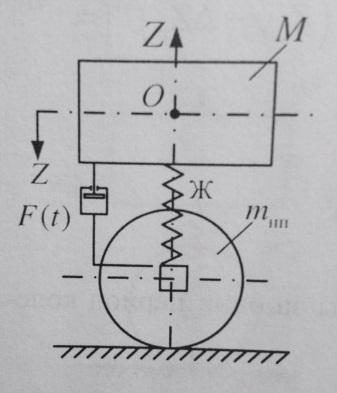
14 Гашение колебаний. Вертикальные колебания эпс с учетом сил сопротивления в системе рессорного подвешивания.
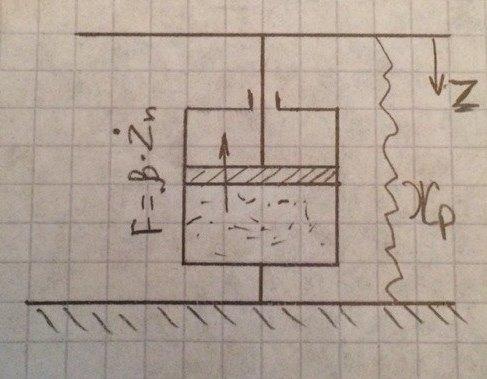
При рассмотрении вынужденных колебаний экипажа, установлено, что в режиме резонанса при отсутствии в системе РП сил сопротивления амплитуда колебаний над рессорного строения стремительно нарастает, увеличиваясь в течении каждого периода главных колебаний на величину ∆Zp.

Для ограничения амплитуды колебаний в резонансном режиме конструкция РП должна содержать необходимое количество сил сопротивления, источником которых является гасители колебаний.
Типы гасителей колебаний применяемых на отечественном ЭПС.
В современных ЭПС используют гасители колебаний двух видов: фрикционные и вязкого сопротивления(гидравлические).
Среди фрикционных гасителей используются 2 типа:
1 с постоянной силой трения(буксовая ступени электропоездов)
Жр – жесткость рессорного подвешивания
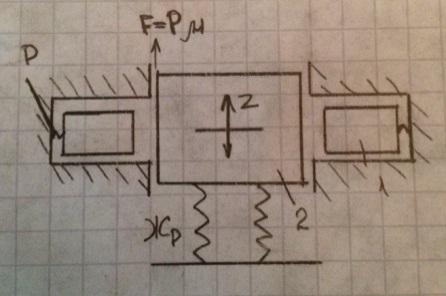
Сила сопротивления (трения) возникает между корпусом буксы и рамой тележки за счет упругого прижатия элемента гасителя 1 к элементу боковой рамы 2.
2 клиновые – с силой трения пропорционально перемещению
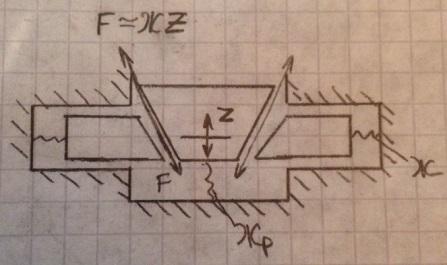
К данному типу также относятся листовая рессора.
Вязкого сопротивления так же два типа:
1 С силой сопротивления, пропорциональной 1ой степени скорости перемещения

2
Гасители с зависимостью силы сопротивления
от скорости перемещения другого вида:
 В
таких гасителях применяют сложенную
систему клапанов, при которой каждый
клапан вступает в действие селективно
при определенной частоте колебаний.
Наиболее эффективны в кузовной ступени
экипажа
В
таких гасителях применяют сложенную
систему клапанов, при которой каждый
клапан вступает в действие селективно
при определенной частоте колебаний.
Наиболее эффективны в кузовной ступени
экипажа
19 Максимальная база экипажа
Максимальная база – база экипажа, при которой она еще вписывается в кривую заданного радиуса.
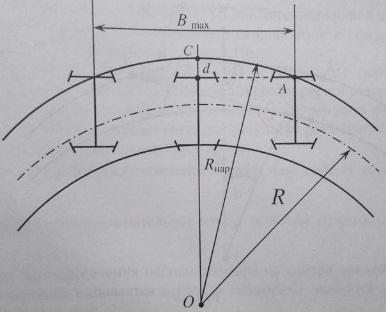



 ,
м
,
м



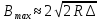
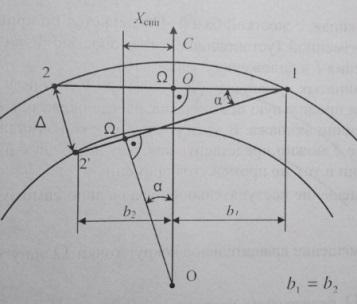
Положение экипажа в кривой при его движении.

При принятом направление движения в зависимости от скорости ( величины центробежной силы С ) первая колесная пара является набегающей ( направляющей ) поэтому будет всегда прижата к внешнему рельсу.
Последняя по ходу колесная пара ( точка 2 ) в зависимости от скорости движения может быть также прижата к внешнему рельсу расположившись по хорде, либо занять положение когда она окажется прижатой к внутреннему рельсу.
Первое положение экипажа называется хордовым (положение высоких скоростей, а второе наибольшим перекосом ( положение малых скоростей ). Между этими двумя крайними положениями теоретически может быть множество промежуточных соответствующих различным скоростям движения ( показаны пунктиром ).
Понятие о центре поворота экипажа при его движении по кривой
(.)Ω – пересечение перпендикуляров из центра кривой с продольной осью экипажа называется центром (полюсом) поворота экипажа при его движении в кривой.
Наибольшего перекоса
Хордовое положение:
![]()
В
зависимости от скорости движения центр
поворота может находится на продольной
оси экипажа
![]()
У экипажей с малой базой в кривой значит. радиуса центр поворота может оказаться за пределами базы. И так при хордовом торможении хс=0, а при наибольшем перекосе хс=хснп.