

1 Назначение рессорного подвешивания и его основные элементы. Основные параметры рессорного подвешивания
Рессорное подвешивание РП – промежуточное звено между подрессорной частью ПС (надрессорное строение) и неподрессоренной частью (колесные пары и жестко связанные с ними детали передаточного механизма). В отечественном ЭПС включает сочетание листовых рессор, винтовых пружин, пневматические баллоны, резиновые элементы, гасители колебаний, противозагрузочные устройства.
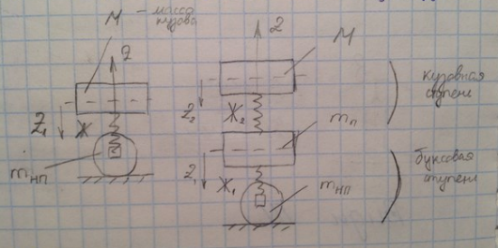
РП бывают одноярусные и двухъярусные.
Задачи РП: передача и распределение между отдельными колесными парами вертикальной статической нагрузкой в соответствии с проектным заданием; обеспечение заданной нагрузкой между отдельными колесными парами в постоянно изменяющихся условиях работы локомотива; смягчение действия на ЭПС динамических нагрузок при неровности пути.
Основные параметры рессорного подвешивания
Каждый упругий элемент обладает жесткостью Ж и статическим прогибом fст
Гибкость
 .
.
Жесткость
упругого элемента характеризуется
величиной нагрузки на единицу прогиба:

За расчетный прогиб принимается величина под статической нагрузкой:

где Рп = Р - Рнп – подрессорная нагрузка; P – полная; Рнп – неподрессорная нагрузка; Жэ – эквивалентная жесткость.
Статический прогиб комплекта упругих элементов принимается равным конструкционной скорости локомотива: fст = lVконстрl , мм=км/ч

 –буксовой прогиб
–буксовой прогиб
 –кузовной прогиб
–кузовной прогиб
3
Действительные и эквивалентные точки
подвешивания
Сравним
2 системы:
1 при недостатке буксировки
упругих элементов
2 при наличии
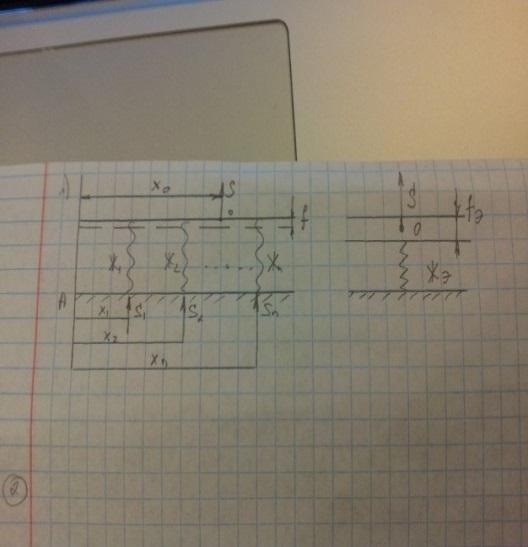
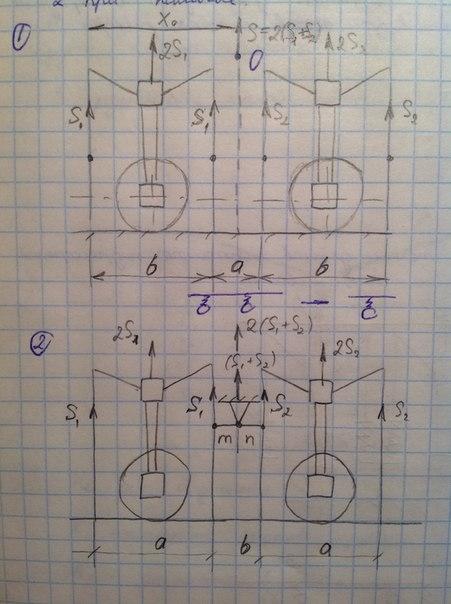 Рассмотрим
систему имеющие 4 действ точки
подвешивания.
Равнодейств. сила S
приложенная в точке О на некоторое
расстояние xо
– эта равн. сила явл. эквиваленной
нагрузкой для эквивал. системы. Таким
образом точка её приложения выполняет
роль её эквивалентной точки.
Соствим
уравнения равновесия сил:
Рассмотрим
систему имеющие 4 действ точки
подвешивания.
Равнодейств. сила S
приложенная в точке О на некоторое
расстояние xо
– эта равн. сила явл. эквиваленной
нагрузкой для эквивал. системы. Таким
образом точка её приложения выполняет
роль её эквивалентной точки.
Соствим
уравнения равновесия сил:



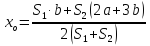 Точка
приложения равн. силы зависит от величины
нагрузок (точности регулировки РП),а
также линейных параметров системы. Эта
точка- плавающая
Точка
приложения равн. силы зависит от величины
нагрузок (точности регулировки РП),а
также линейных параметров системы. Эта
точка- плавающая


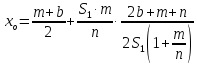
 Вывод:положение
равнодейств. силы не зависит от величины
и распределения нагрузок , а опр.
линейными параметрами системы.
Вывод:положение
равнодейств. силы не зависит от величины
и распределения нагрузок , а опр.
линейными параметрами системы.
Эквивалентная жесткость систем
1 Параллельная работа упругих элементов.
При параллельной работе упругих элементов их прогибы одинаковы и равны прогибу эквивалентной рессоры (fэ); Нагрузка эквивалентной рессоры является суммарной нагрузкой отдельных упругих элементов: S=S1+S2+S3+….+Sn;
Жэfэ=Ж1f+Ж2f+Ж3f+…+Жnf;
Жэ= ;
;
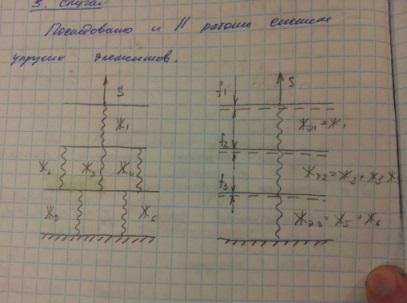
2 Последовательная работа системы.

Эквивалентный
прогиб: fэ=f1+f2+…+fn= ;
Прогиб отдельного элемента: f =S/Ж
;
Прогиб отдельного элемента: f =S/Ж ;
;
 =
= +
+ +…+
+…+ ;
; ;
Гэ=
;
Гэ= ;
- гибкость;
;
- гибкость;
3 Последовательно-параллельная работа систем упругих элементов.
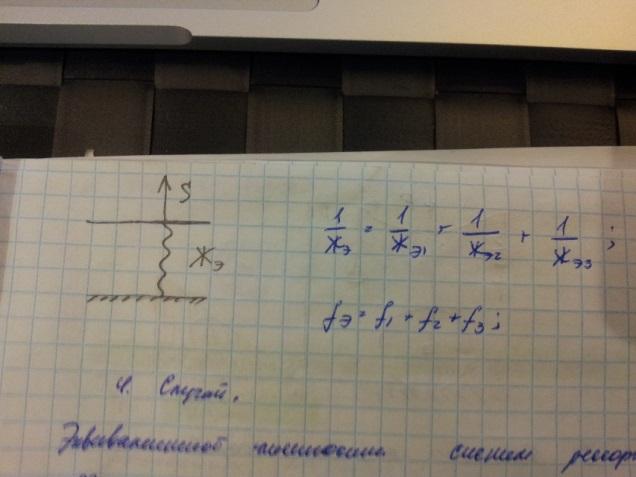
 fэ=f1+f2+f3;
fэ=f1+f2+f3;
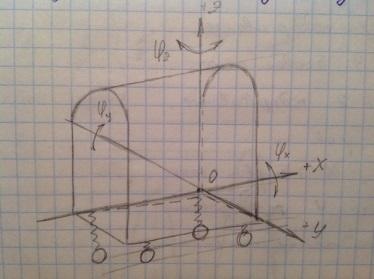
5 Виды колебаний и их взаимосвязь
При исследовании сложного процесса колебаний, надрессорное строение экипажа считаем жесткой недеформированной конструкцией, т.е. твердым телом. → положение тела в пространстве описывается 6 обобщенными координатами. Совмещаем начало координат с центром упругости рессорного пути, ось х вдоль путь, ось у перпендикулярно оси х, ось z перпенд. плоскости xoy. При движении экипажа на тело действуют возмущающие силы, под действием которых он совершает сложные перемещения, сопровождающиеся колебательными движениями под действиями упругих сил. 6 видов колебаний: Возвратно-поступательные: Вдоль оси х- подергивания, вдоль у- боковой относ, вдоль z- подпрыгивания; Возвратно-угловые: Вокруг х- боковая качка, вокруг у- галопирование, вокруг z- виляние.
Возбудители колебаний
Рельсовый путь отклоняется от прямолинейного в горизонтальных и вертикальных плоскостях.

Отклонения обусловлены факторами: 1. Остаточная деформация в зоне стыка. Стык- самое слабое место конструкции пути. Со временем рельс в зоне стыка проседает, путь получает волнистый профиль. 2. Стыковые соединения и их взаимное расположение на 2ух рельсовых нитях: -друг напротив друга, -вразбежку. 3. Волнообразным износом рельсов 4 Наличием стрелок и крестовин. 5 Сопряжением прямых и кривых участков пути. 6.Дефектами на поверхности катания колес.
Эти факторы делятся на 2 группы: I. Периодически повторяющиеся. II Случайные
I группа- факторы, указанные в п.п.1-3. Эти дефекты пути при определенных условиях могут явиться причиной резонансных явлений. Случайные дефекты вызывают разовые толчки, не представляющие опасности. Чаще экипаж подвержен вертикальным колебаниям- вынужденными и свободными. Причина вынужденных колебаний- внешние возмущения, частота этих возмущений определяет частоту вынужденных колебаний. Свободные колебания являются результатом единичного воздействия возмущающего фактора и совершаются под действием упругой силы. Т.о. свободные колебания могут возникать в системах, имеющих хотя бы 1 упругую связь между элементами внутри системы. Экипажи без рессорного подвешивания не могут совершать свободные колебания.