

1.4.1. Центр тяжести
|
L |
|
sin( / 2) L / 2ri L / 2RE 1 |
|
|
|
|
P1 |
P |
|
|
|
2 |
|
|
|
Р |
• |
Система сил тяжести, действующих на различ- |
r1 |
r2 |
|
ные части любого тела, лежащего на поверх- |
|
|
|
ности Земли, с хорошей точностью можно |
|
|
|
заменить системой параллельных сил |
•Равнодействующая сил тяжести, действующая на каждую частицу тела, приложена в центре данной системы параллельных сил и равна сумме сил тяжести (весу тела)
•Точка приложения равнодействующей сил тяжести, действующих на тело, и называется центром тяжести тела
12.41. СПСО РЕДЕЛЕНИЕ ССС |
41 |

1.4.4. Координаты центра тяжести |
|
|||||||||||
z |
|
|
|
|
• |
Разобьем данное тело на элементы Vi |
||||||
|
|
|
|
|
|
прямоугольной сеткой |
|
|
|
|||
|
rС |
|
|
|
• |
Каждый из полученных элементов заменяем |
||||||
|
|
|
pi |
точкой |
|
|
n |
|
|
|||
|
ri |
|
|
P pi |
|
|||||||
O |
|
|
|
|
|
|
||||||
|
|
• |
y |
|
|
|
|
i 1 |
|
|
||
|
|
|
|
|
|
|
|
1 n |
|
|||
|
|
|
P |
Радиус-вектор центра тяжести |
||||||||
x |
|
|
|
|
|
|
|
|
|
rC |
pi ri |
|
|
|
|
|
|
n |
|
n |
|
|
P i 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
определяется соотношением |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
pi ri |
i Vi ri |
|
|
||||
|
|
|
lim |
|
|
lim i 1 |
|
|
|
|
||
|
|
|
r |
i 1 |
|
|
|
|
|
|||
|
|
|
|
C |
|
n |
|
n |
|
|
|
|
|
|
|
|
|
n |
pi |
n i Vi |
|
|
|||
|
|
|
|
|
|
i 1 |
|
i 1 |
|
|
|
|
|
|
|
|
1 |
|
|
|
P |
|
|
|
|
|
|
rC |
|
(r )rdV |
(r )dV |
|
||||||
|
|
|
|
P V |
|
|
V |
|
|
|
||
12.41. СПСО РЕДЕЛЕНИЕ ССС |
|
|
|
|
|
|
|
42 |
||||

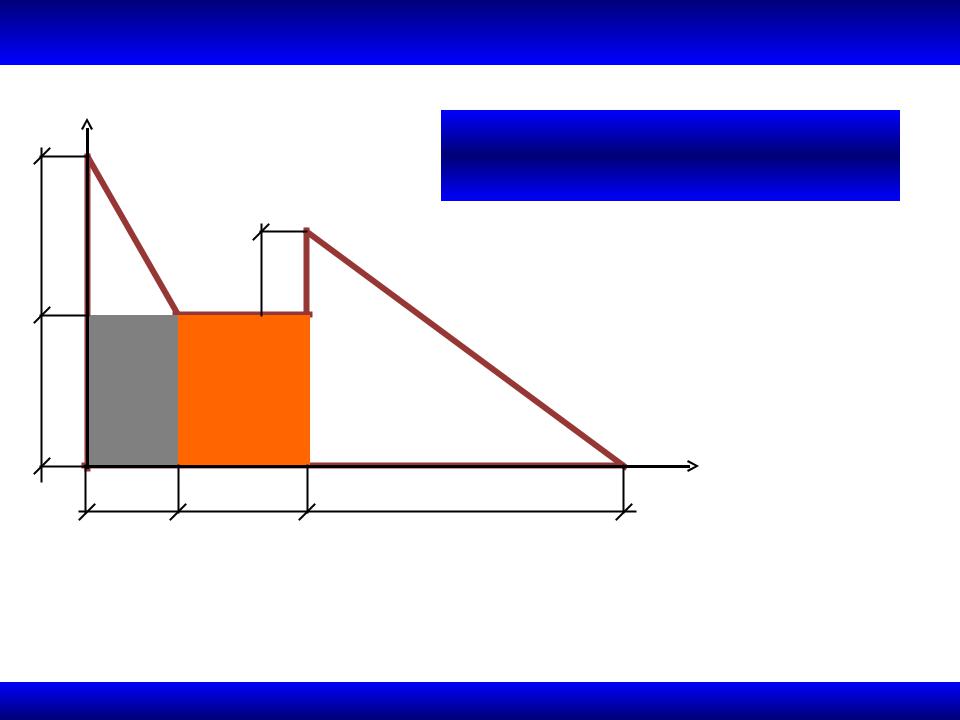
1.4.5.Методы определения центра тяжести
•Метод симметрии
Если однородное тело имеет плоскость или ось симметрии, то его центр тяжести лежит соответственно или в плоскости симметрии, или на оси симметрии. Если же тело имеет центр симметрии, то его центр тяжести находится именно в этом центре
|
|
|
P |
P |
|
|
|
P |
12.41. СПСО РЕДЕЛЕНИЕ ССС |
43 |
1.4.5. Методы определения центра тяжести |
|||||||
Метод разбиения |
|
|
n |
n |
|
||
y |
|
|
|
|
|
||
|
|
xC S 1 xCi Si , yC S 1 yCi Si |
|||||
|
|
|
|
|
i 1 |
i 1 |
|
d |
|
l |
|
|
x1 (a / 3), |
S1 (ad / 2) |
|
1 |
|
|
|
||||
|
|
|
|
x2 (a / 2), |
S2 |
ak |
|
|
|
|
|
|
|||
k |
|
|
|
|
x3 (a b / 2), |
S3 bk |
|
|
2 |
3 |
|
|
4 |
|
|
a |
b |
|
c |
|
x |
|
|
|
x4 |
(a b c / 3), |
S4 |
c(k l) / 2 |
|
|
|
12.41. ЦЕНТРОПРЕДЕЛЕНИЕТЯЖЕСТИССС |
|
|
|
|
|
44 |
|
1.4.5. Методы определения центра тяжести
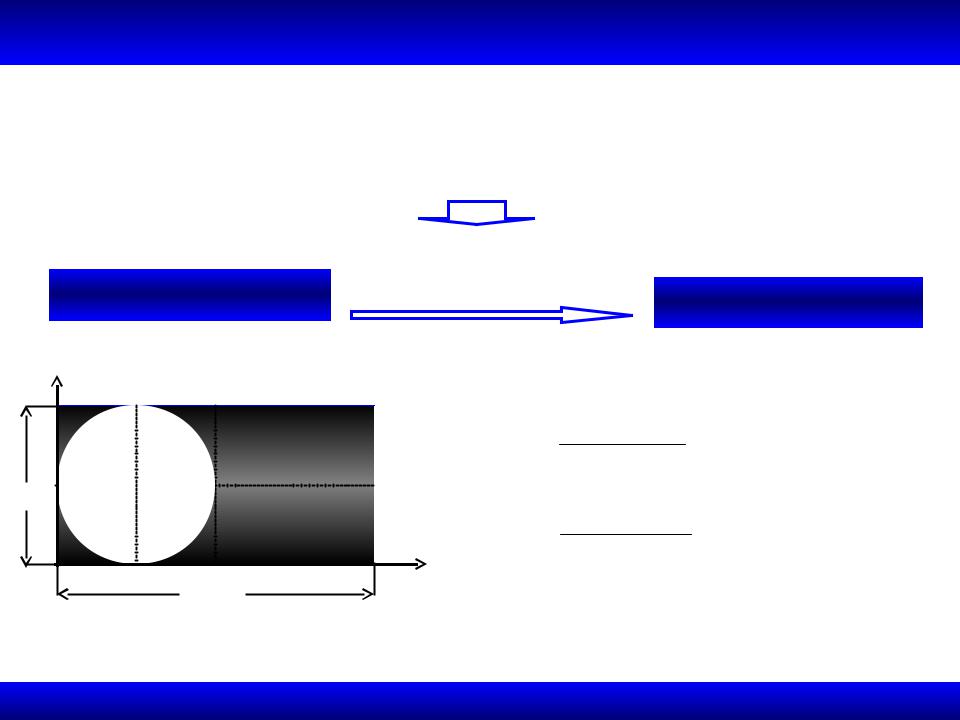
Метод дополнений (отрицательных весов)
• |
Пусть тело, вес которого P, имеет полость заданного объема V. Если бы тело |
||||
|
не имело полости, то его вес был бы равен P’ = P+PV, где PV – вес объема V. |
||||
• |
Радиус-вектор тела без полости тогда равен |
|
|
||
|
|
|
|
|
|
|
' |
|
|
|
|
|
rC P rCV PV / P' |
|
rC rС P' rCV PV / P |
|
|
|
rc |
для тела с полостью |
|
||
|
|
|
' |
|
|
|
|
|
|
|
|
y |
Задача 8 |
|
|
|
|
|
2 |
1 |
x x1S1 x2S2 |
a(16 ) |
|
|
|
|
C |
S1 S2 |
4(8 ) |
a/2 |
|
|
|
||
|
|
yC y1S1 y2S2 |
a |
||
|
|
x |
|||
|
|
|
S1 S2 |
4 |
|
|
|
a |
|
|
|
12.41. СПСО РЕДЕЛЕНИЕ ССС |
45 |
I. Статика
I.5. Теория пар сил
46
1.5. Теория пар сил
•Теорема о равнодействующей двух параллельных сил, направленных
впротивоположные стороны
•Пара сил
•Момент пары сил
•Момент пары как вектор
•Теорема об эквивалентных парах
•Теорема о сложении пар
•Условия равновесия пар
•Жесткая заделка
11.24.5. ОСВЯЗИ. СТАТИКАНОВНЫЕИ РЕ ПОНЯТИЯКЦИИ СВЯЗЕЙИ МОДЕЛИ |
47 |
1.5.1. Теорема о равнодействующей двух сил
Система двух не равных по модулю сил, линии действия которых параллельны, но силы направлены противоположно, имеет равнодействующую, которая равна по модулю разности модулей этих сил, им параллельна и направлена в сторону большей силы.
Линия действия равнодействующей проходит через точку, которая лежит на продолжении отрезка АВ и делит этот отрезок внешним образом на части, обратно пропорциональные силам.
12.15. ОПРЕДЕЛЕНИЕТЕОРИЯ ПАР СИЛССС |
48 |
1.5.2. Пара сил
Рассмотрим случай, когда P = Q
• Из доказанной теоремы следует, что R P Q 0 и
|
AC lim Q AB |
|
||
P |
||||
A |
P Q P Q |
|
||
|
|
|
|
|
|
|
|
|
|
• |
Такая система сил не имеет |
В |
равнодействующей и |
|
|
|
|
Q |
называется парой сил |
•Под действием пары сил тело вращается
иэто вращение характеризуется
моментом пары
1ПАРА2.15. ОПРЕДЕЛЕНИЕТЕОРИЯСИЛ ПАР СИЛССС |
49 |
|
|

1.5.3. Момент пары
|
M |
Пусть дана пара сил (F, F1) |
|
|
• Плоскость, проходящая через |
||
|
F1 |
||
А |
линии действия сил, называется |
||
|
|||
|
B |
плоскостью действия пары |
|
F |
|
• Расстояние между линиями действия |
сил называется плечом пары Моментом пары сил называется вектор M , модуль которого равен произведению модуля одной из сил пары на плечо пары: M=Fd. Направлен этот вектор перпендикулярно плоскости действия пары в сторону, откуда вращение пары видно происходящим против часовой стрелки.
Для пар сил, расположенных в одной плоскости можно использовать понятие алгебраического момента пары: M = ±Fd. Знак "плюс" берется, если пара стремится повернуть тело против хода часовой стрелки, "минус" – по ходу.
1ПАРА2.15. ОПРЕДЕЛЕНИЕТЕОРИЯСИЛ ПАР СИЛССС |
50 |