

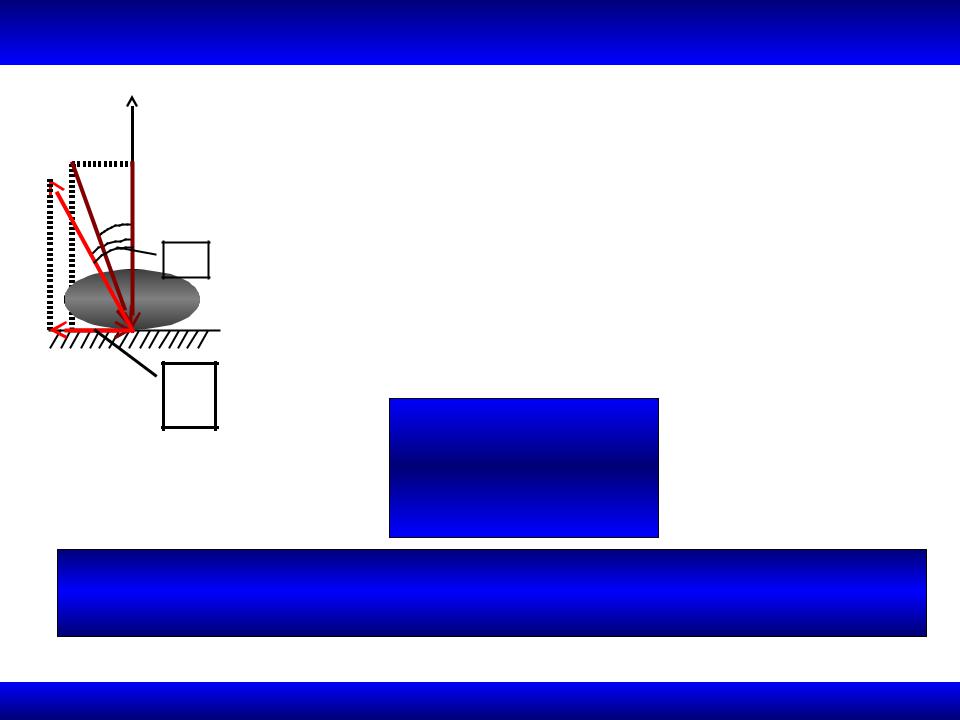
1.7.3. Конус трения
R 




















 N
N
R N Ff
|
Ff |
|
tg Ff / N |
|
Для предельной силы трения имеем |
R* N Ff |
|||
R* |
N |
tg |
* |
* |
|
|
|
Ff / N fs |
|
*
Ff* 
* – угол трения
Конус с вершиной в точке касания тел, образующая которого составляет угол трения с нормалью к их поверхностям, называется конусом трения
2 1. ОПРЕДЕЛЕНИЕ ССС |
71 |
1.7. ТРЕНИЕ |
|
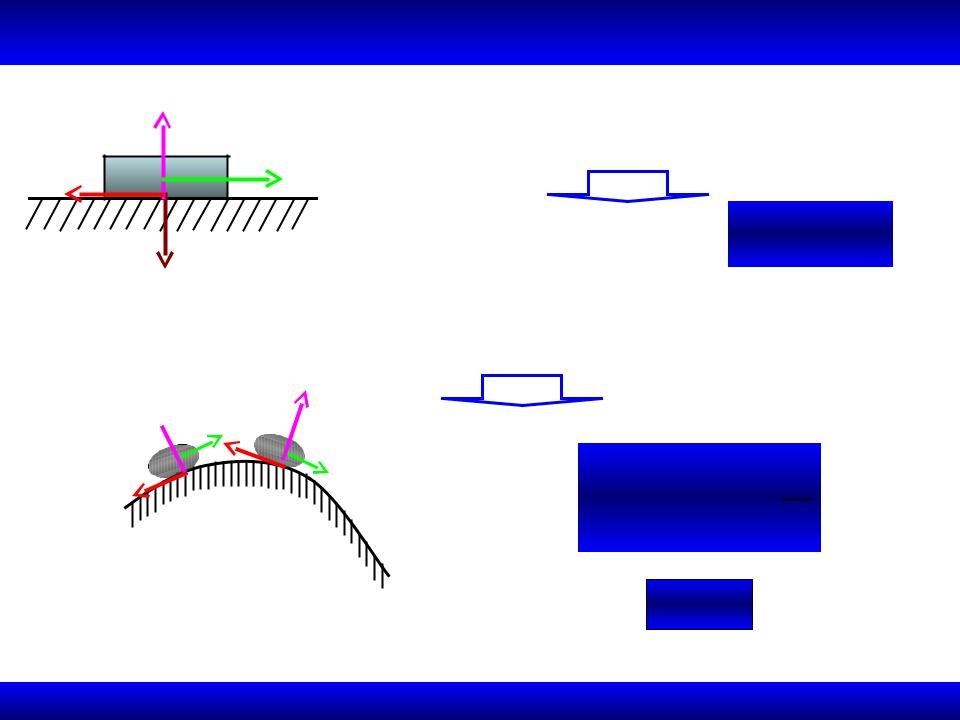
1.7.4. Заклинивание
F |
y |
• |
Сдвинется ли тело под действием силы |
|
|
|
при заданном значении угла ? |
||
R* |
|
F cos |
• |
Сдвинется ли тело, если при заданном |
|
* |
|||
|
|
|
значении угла увеличивать модуль силы |
|
|
|
|
|
F? |
|
F sin |
Ff* |
Условие, при котором тело сдвинется |
|
|
|
* |
||
|
|
|
|
|
Если внешняя сила F лежит внутри конуса трения, то сколько ее не увеличивай, тело не сдвинется (заклинится)
2 1. ОПРЕДЕЛЕНИЕ ССС |
72 |
1.7. ТРЕНИЕ |
|
1.7.5. Сила трения скольжения
N |
|
Пусть теперь тело веса P движется по |
|
v |
плоской шероховатой поверхности |
||
Ff |
|
|
|
|
P |
Закон Кулона-Амонтона |
Ff fd N |
|
|
|
|
Сила трения направлена противоположно вектору скорости движения тела
N  v
v
Ff |
Ff |
N |
|
v |
v
Ff fd N v
fd fs
2ТРЕНИЕ1. ОПРЕДЕЛЕНИЕСКО ЬЖЕНИЯССС |
73 |
1.7. ТРЕНИЕ |
|

1.7.6. Сила трения качения
N
Q |
Ff |
P |
•Чтобы заставить диск катиться по поверхности, необходимо приложить силу
•На катящийся диск радиуса R и веса P на шероховатой плоскости также действует сила сопротивления, которую называют силой трения
качения
• Если рассмотреть схему на верхнем рисунке, то качение должно начаться при любой сколь угодно малой силе Q, что противоречит опыту
|
|
• |
Противоречие связано с ограниченностью |
|
Ff |
Q |
|
применимости в данном случае модели твердого |
|
k |
|
тела. Соприкасающиеся при качении диска тела |
||
|
|
деформируются, их происходит вдоль некоторой |
||
А |
В |
|
площадки АВ |
|
|
P |
Qmax R Nk |
M *f kN |
|
k – коэффициент трения качения
2ТРЕНИЕ1. ОПРЕДЕЛЕНИЕСКО ЬЖЕНИЯССС |
74 |
1.7. ТРЕНИЕ КАЧЕНИЯ |
|
I. Статика
I.8. Расчет плоской фермы и составных тел
75

1.8. Расчет конструкций
•Понятие о ферме
•Статически определимые простые плоские фермы
•Аналитический расчет плоской фермы
•Метод вырезания узлов
•Метод Риттера (сечений)
•Расчет двухсоставной рамы
•Расчет двухсоставных конструкций из балок
11.24.7. ОСВЯЗИ. СТАТИКАНОВНЫЕИ РЕ ПОНЯТИЯКЦИИ СВЯЗЕЙИ МОДЕЛИ |
76 |
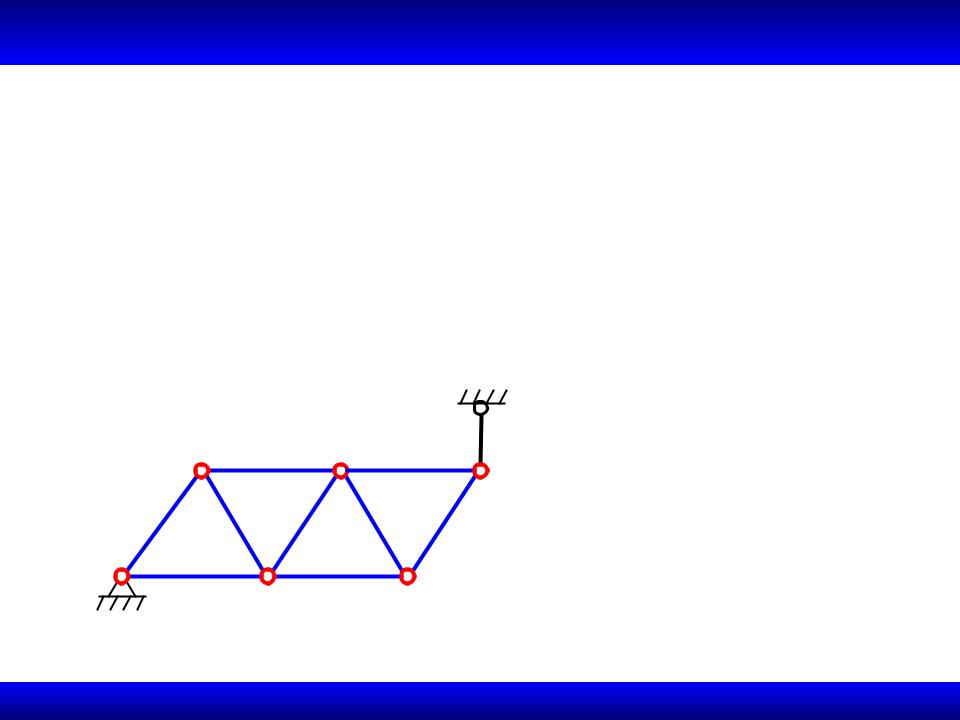
1.8.1. Плоская ферма
•Ферма – жесткая, геометрически неизменяемая конструкция, состоящая из невесомых прямолинейных стержней, соединенных идеальными (без трения) шарнирами
•Шарнирные соединения называются узлами фермы
•Плоской называется ферма, все стержни и шарниры которой лежат в одной плоскости
|
C |
|
E |
|
• |
Узлы фермы будем |
|
4 |
8 |
B |
обозначать большими |
||
|
|
|
|
|
латинскими буквами |
|
|
1 |
3 |
5 |
7 |
9 |
A, B, … G |
A |
2 |
D |
6 |
|
• |
Стержни пронумеруем |
|
|
|
|
G |
|
12.81. РАСЧЕТОПРЕДЕЛЕКОНСТРУКЦИЙИЕ ССС |
77 |

1.8.2. Расчет плоской фермы
Расчет плоской фермы сводится к
нахождению сил реакции опор;
определению усилий в стержнях фермы методом вырезания узлов и/или методом сечений ( Риттера)
12.81. РАСЧЕТОПРЕДЕЛЕКОНСТРУКЦИЙИЕ ССС |
78 |

1.8.3. Метод вырезания узлов
Метод вырезания узлов
|
y |
|
F3 |
III |
6 |
|
||
F2 |
4 |
5 |
II |
3 |
R |
B |
1 |
2 |
F1 I |
B |
|
|
|
|
|
|
|
YA |
|
|
• Пронумеруем все стержни |
IV |
V |
X A |
фермы арабскими цифрами: |
|
8 |
1, 2, 3, … 9 |
|||
7 |
A |
|
|
• Пронумеруем узлы фермы |
9 |
|
|
||
VI a |
|
|
римскими цифрами: I, II,…, IV |
|
• |
Рассмотрим равновесие каждого |
|||
|
x |
|
узла и составим для него уравнения |
|
|
|
равновесия, cчитая условно все |
||
|
|
|
||
|
|
|
стержни растянутыми и направляя |
|
|
|
|
реакции шарниров от узлов |
|
• Следует учесть, что стержни находятся в равновесии. Поэтому реакции соединительных шарниров должны быть равны по величине и противоположно направлены
1ПРИМЕР2.81. РАСЧЕТОПРЕДЕЛЕРАСЧЕТАКОНСТРУКЦИЙИЕФЕРМЫССС |
79 |

1.8.4. Метод сечений (Риттера) Метод с чений (Риттера)
• |
Метод Риттерау удобен, если |
y |
z |
|
|
YA |
|
|
|
необходимо определить усилия в |
F3 |
|
6 IV |
8 |
V |
X A |
|
|
каких-то отдельных стержнях |
4 |
|
5 |
7 |
|
A |
|
|
фермы, например, 6, 7, 9 |
|
|
|
||||
• |
F2 |
3 |
|
|
9 |
z |
|
|
Число стержней в сечении |
|
VI |
|
|||||
RB |
1 |
|
a |
|
|
|||
|
должно быть не более трех |
2 |
|
|
||||
|
F1 |
B |
|
x |
|
|
||
|
|
|
|
|
|
|
||
Последовательность действий
•Проведем сквозное сечение z–z через стержни 6,7,9
•Пользуясь принципом отвердевания, рассмотрим равновесие одной из частей фермы, например, правой
•Составляем 3 уравнения равновесия для этой части фермы
1ПРИМЕР2.81. РАСЧЕТОПРЕДЕЛЕРАСЧЕТАКОНСТРУКЦИЙИЕФЕРМЫССС |
80 |
|
|