

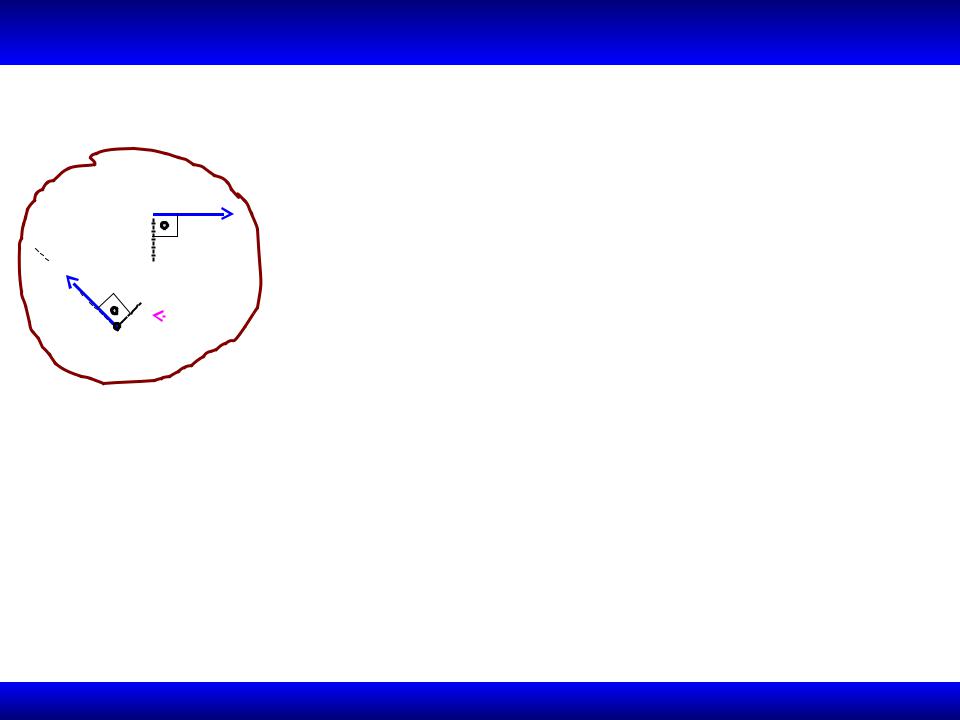
2.3.4. Теорема о скоростях 2-х точек
vM vA vMA Скорости произвольных двух точек связаны между собой
Следствие 1
Проекции скоростей двух точек сечения S на прямую, их соединяющую, равны
vА 

А



 vМ
vМ
vМА 

 vА
vА
М
• Для доказательства достаточно спроеци- ровать уравнение скоростей на прямую АМ и учесть, что vMА АМ
Следствие 2
• Если точки А, В и С сечения S лежат на одной прямой, то концы векторов скоростей этих точек, тоже лежат на одной прямой, причем
2.3. КИНЕМАТИКА ПЛОСКОГО ДВИЖЕНИЯ ТТ |
111 |

2.3.5. Теорема о МЦС
Мгновенным центром скоростей (МЦС) сечения тела (или плоской фигуры) называется точка, скорость которой в данный момент времени равна нулю
Теорема
Если угловая скорость рассматриваемого сечения S в данный момент времени отлична от нуля, то мгновенный центр скоростей существует и единственен
Действительно, рассмотрим сечение S
А 


 vА
vА 

 B S C
B S C













 vB
vB
B’ 



 А’
А’
•Пусть в некоторый момент времени t точки A и B имеют скорости, не параллельные друг другу
Это следует из теоремы о проекциях скоростей, так как если бы скорость vС была отлична от нуля, то она одновременно должна была бы быть перпенди- кулярна к АА’ и BB’. Последнее, однако, невозможно в силу непараллельности скоростей
точек А и В
Теорема доказана
2.3. ПЛОСКОЕ ДВИЖЕНИЕ ТТ |
112 |
2.3.6. Нахождение МЦС
• МЦС может быть найден, если известны скорость одной точки тела, например A, и линия действия скорости второй точки тела, например, B
A  vА
vА




 v
v
 B C
B C
 ω
ω
B

•Восстановив перпендикуляры к вектору скорости точки A и к линии действия скорости точки B, находим точку их пересечения C, которая и будет МЦС
•Вращение тела происходит туда, куда вектор скорости vA первой точки поворачивает тело вокруг МЦС
v A |
AC |
, |
|
v A |
|
vB |
|
vB |
|
|
|||||
BC |
|
|
AC |
|
BC |
|
•При определении скоростей точек тела плоское движение можно представить как последовательность мгновенных вращений вокруг мгновенного центра скоростей, который сам перемещается в плоскости движения тела
2.3. ПЛОСКОЕ ДВИЖЕНИЕ ТТ |
113 |
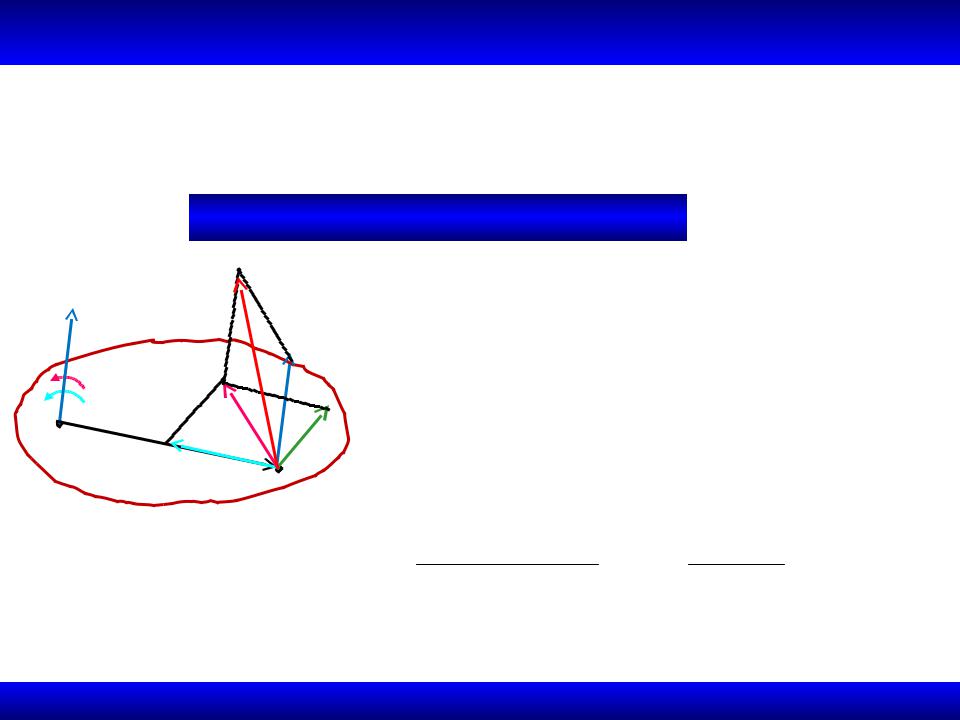
2.3.7. Теорема о сложении ускорений точек
Ускорение любой точки тела, совершающего плоское движение,
определяетсяТеоремакак суммао ускорениясложенииполюсаускоренийи ускорения данной точки во вращательном движении вокруг полюса
aB aA aA aВA
Доказательство
aA |
|
aВ |
|
||
|
|
|
|
aВA |
|
A |
|
|
|
aBAn |
|
|
|
|
|
dv |
B |
|
d |
|
|
|
dv |
|
|
d |
|
|
d |
|||
aB |
|
|
|
|
|
vB |
|
|
A |
|
|
|
|
|||||
|
|
dt |
|
|
dt |
dt |
||||||||||||
aA |
|
dt |
|
|
|
|
dt |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
aA aA aBA aBA |
|
|
|||||||||||||
B aBA |
|
aBA |
, |
aBAn |
vBA |
|||||||||||||
|
|
aBA AB, |
|
a nBA vBA 2 AB |
|
|
|
|||||||||||
a BA 
 (a nBA )2 (a BA )2 AB
(a nBA )2 (a BA )2 AB
 4 2
4 2
Теорема доказана
2.3. ПЛОСКОЕ ДВИЖЕНИЕ ТТ |
114 |
Литература
1.Рудяк В.Я., Юдин В.А. Лекции по теоретической механике. Часть I. Статика и кинематика. Нов- ск. 2004
2.Рудяк В.Я., Юдин В.А. Сборник индивидуальных заданий по теоретической механике. Статика. Нов-ск. 2004
3.Бутенин Н.Н., Лунц Я.Л., Меркин Д.Р. Курс теоретической механики. М. 2008
4.Тарг С.М. Краткий курс теоретической механики. М. 2008
1ЗАКЛЮЧЕНИЕ.23. ОСНОВНАКСИОМЫЕСТАТИКИПОНЯТ Я И МОДЕЛИ |
115 |