

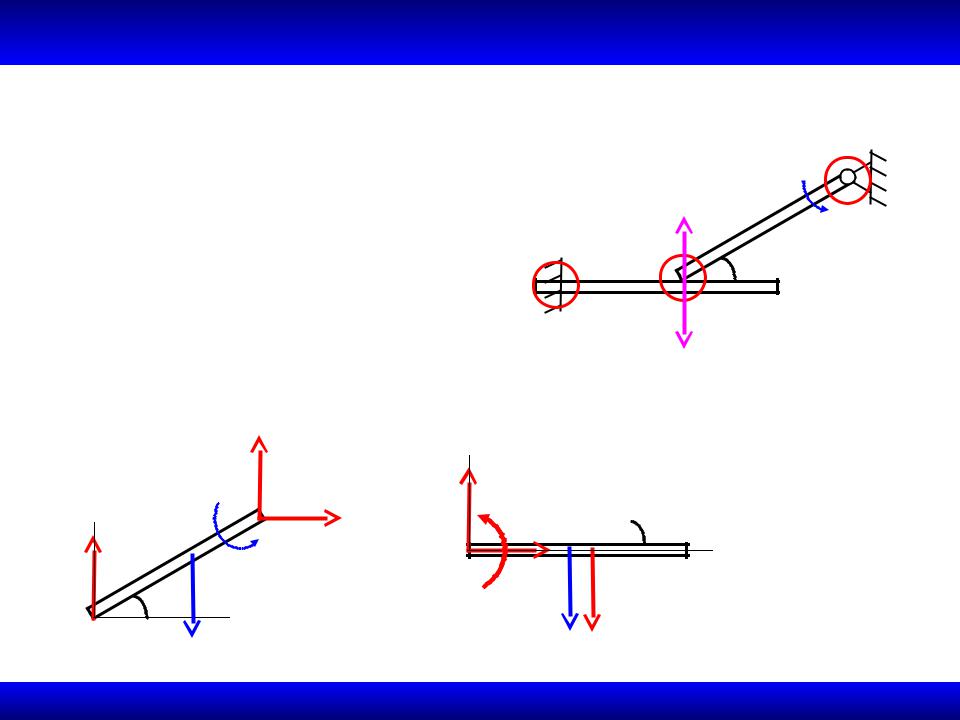
1.8.5. Расчет составных рам |
|
|
|||||||
F2 |
3 м |
С |
Дано: F1 = √2 кН, F2= 3 кН, М = 3 кНм |
||||||
|
|
||||||||
|
|
F1 |
|
Определить реакции внешних |
|||||
|
|
|
M |
|
|||||
|
|
|
|
и внутренних связей |
|
||||
|
|
|
|
45о |
|
|
|||
4 м |
|
|
1.5 м |
|
• освобождаемся от внешних |
|
|||
|
|
2 м |
связей и заменяем их реакциями |
||||||
|
|
|
|
||||||
|
А |
|
|
• Система статически неопределимая |
|||||
|
|
|
|
||||||
|
|
|
В |
Метод расчленения |
YС |
|
|||
F2 |
|
|
С |
|
|
|
XС С С |
|
|
|
|
M |
F1 |
F2 |
|
XС |
F1 |
||
|
|
|
|
45о |
|
|
YС |
M |
|
YA |
М |
А |
|
R |
|
YA |
|
R |
|
|
А |
|
|
B |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
X A |
|
|
В |
|
|
А |
B |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
X A |
В |
|
|
|
|
|
|
|
|
|
|
|
|
12.81. РАСЧЕТОПРЕДЕЛЕКОНСТРУКЦИЙИЕ ССС |
81 |
1.8.6.Расчет составной конструкции из балок
Дана конструкция, состоящая из двух |
|
|
|
|
однородных балок AB и CD весом P и |
|
|
D |
|
длиной l, AC = 0.7l |
|
|
|
|
Определить реакции жесткой |
|
|
NC |
M |
заделки А, шарнирной опоры D и |
|
C |
|
|
|
|
|||
давление в точке С на балку AB |
|
|
|
|
A |
|
N B |
|
|
|
|
|
||
|
|
|
C |
|
• Освобождаемся от связей и расчленяем конструкцию на две части
Балка СD |
YA |
YA |
Балка АВ |
|
||
|
D |
|
|
N N |
||
NC |
X A |
X A C |
|
|||
C C |
||||||
|
|
|
||||
C |
M |
Am |
A |
N |
B |
|
|
|
|
||||
|
P |
|
P |
C |
|
|
|
|
|
|
|
||
РАСЧЕТ12.81. РАСЧЕТОПРЕДЕЛЕСОСТАВНЫХКОНСТРУКЦИЙИЕ ССС КОНСТРУКЦИЙ |
82 |
II.Кинематика
2.1.Кинематика точки
83

2.1. Кинематика точки
•Основные понятия
•Задачи кинематики
•Способы задания движения точки
•Траектория точки
•Скорость точки и годограф скорости
•Ускорение точки
•Частные случаи движения точки: прямолинейное
икриволинейное движения.
12.24..КИНЕМАТИКАОССВЯЗИОВНЫЕИ РЕАКЦИИПОНЯТИЯСВЯЗЕЙИ МОДЕЛИ |
84 |
2.1.1. Задачи кинематики
Кинематика – это раздел теоретической механики, в котором изучается движение тела с геометрической точки зрения, т.е. без учета сил, действующих на тело
Движение материальной точки – это изменение ее положения относительно какого-либо другого тела (тела отсчета) с течением времени
Положение объекта задается расстоянием до некоторого другого объекта и является относительным. Относительным является и само движение
Задачи кинематики
1.Определение математических способов задания движения тела
2.Определение для заданного способа задания движения тела его кинематических характеристик
2.1. КИНЕМАТИКАОПР ДЕЛЕНИЕТОЧКИССС |
85 |

2.1.2. Пространство и время
•Постулируется существование не связанных между собой абсолютного пространства и абсолютного времени
•Свойства пространства и времени не зависят и от того, как движутся тела
•Пространство является трехмерным евклидовым пространством, оно однородное и изотропное
•Время также однородное и одинаково во всех точках пространства
•Время изменяется непрерывно, а наблюдатель измеряет "расстояние" между различными моментами времени часами
•Часы универсальны и их показания не зависят от того, расположены они в покоящихся или движущихся объектах
•Однородность времени означает отсутствие выделенных моментов времени. Выбор начала отсчета времени поэтому диктуется лишь конкретной решаемой задачей
2.1. КИНЕМАТИКАОПР ДЕЛЕНИЕТОЧКИССС |
86 |

2.1.3. Векторный и координатный способы
z М
|
|
|
|
|
r (t) |
|
k |
|
|
|
|||
|
|
O |
||||
|
|
|
|
|||
i |
||||||
|
|
|
|
|||
|
|
|
j |
|||
x
•Пусть точка М движется относительно системы отсчета Oxyz
•С течением времени положение точки М относительно данной системы отсчета меняется
y
x x(t), y y(t), z z(t)
Камера Вильсона. Визуализация траекторий элементарных частиц
ВЕКТОРНЫЙ. ОПРЕДЕЛЕНСПОСОБЕ ССС ЗАДАНИЯ ДВИЖЕНИЯ ТОЧКИ. |
87 |
2.1. КИНЕМАТИКА ТОЧКИ |
|
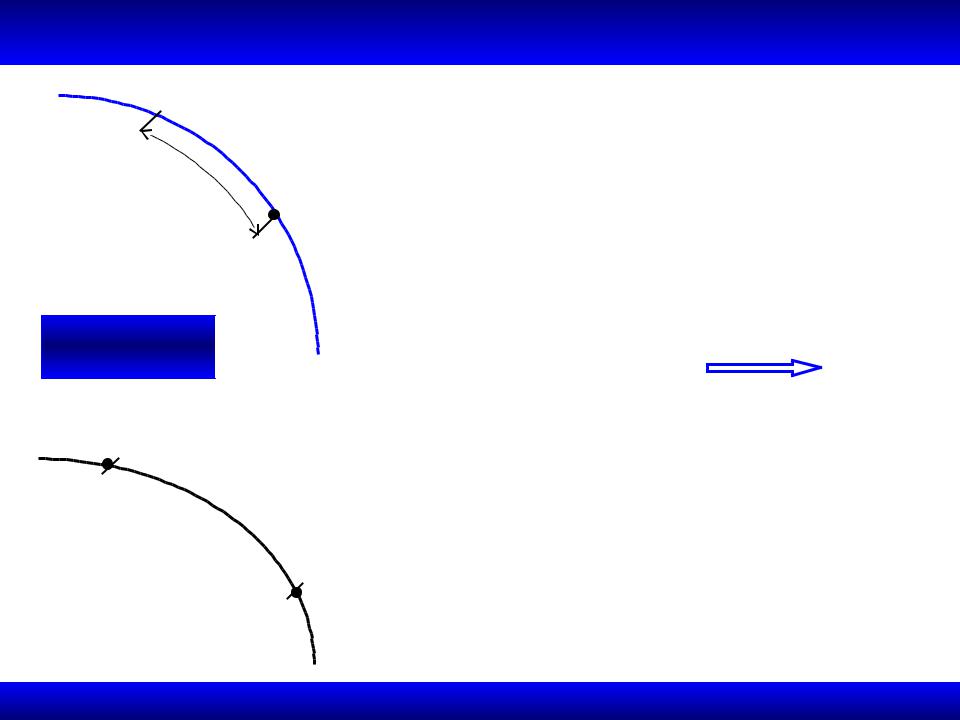
2.1.4. Естественный способ задания
А |
– О |
|
+ |
|
s |
s = s(t)
•Пусть точка М движется вдоль траектории АВ
•Выберем на этой траектории какую-нибудь точку О, которую примем за начало отсчета
M • |
. Будем считать траекторию криволинейной |
|
координатной осью и установим на ней |
• |
положительное и отрицательное направления |
Введем криволинейную координату s, длину |
|
B |
криволинейного отрезка ОМ, взятую с |
|
соответствующим знаком |
|
Закон движения точки вдоль траектории |
|||||
– |
M |
|
|
• |
Стоит заметить, что уравнение s = s(t) |
|
О + |
s |
M |
|
определяет положение точки на |
||
|
|
|
M1 |
траектории, а не путь, пройденный ею |
||
|
|
|
|
• |
Пройденный путь равен |
|
|
|
|
|
|
||
OM1 MM1
ЕСТЕСТВ. ОПРЕДЕЛЕНННЫЙ СПОЕ СССОБ ЗАДАНИЯ ДВИЖЕНИЯ ТОЧКИ. |
88 |
2.1. КИНЕМАТИКА ТОЧКИ |
|

2.1.5. Связь естественного и координатного способов
z |
|
A |
|
|
|
|
|
|
• Пусть точка M движется вдоль траектории АВ |
||||||||||||||||||
– |
|
|
|
|
|
|
• Приращение траектории s за время t равно |
||||||||||||||||||||
|
|
O |
|
|
|
s |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
+ М |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
s ( x)2 ( y)2 ( z)2 |
|
|
|
|
|||||||||||||||
|
z |
|
|
|
|
|
x |
При |
|
t 0 |
|
|
|
|
|
|
|
|
|
|
|
||||||
О |
|
|
|
|
y |
|
|
B |
|
s |
0, x |
0, y |
0, z 0 |
||||||||||||||
|
|
|
|
|
|
y |
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ds (dx)2 (dy)2 (dz)2 |
|
|
|
|
||||||||||||
• Координаты s, x, y, z – функции времени |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
где |
|
|
dx |
|
|
dy |
dz |
|
|
|
|
|
|
|
|
|
|
dx xdt, dy |
ydt, dz zdt, |
x dt |
, y dt , |
z dt |
|
|
|
|
|
|
|
|
|
||||||||||||||
ds |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
2 |
z |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
2 |
|
|
2 |
|
|
|
||||||
dt |
|
x |
|
y |
|
|
|
|
|
s(t) s(0) x |
|
y |
|
z |
|
dt |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2.1. КИНЕМАТИКА ТОЧКоэффициентИ |
трения покоя |
89 |
. ОПРЕДЕЛЕН Е ССС• |
|
|

2.1.6. Скорость точки
z
|
) |
|
t |
( |
|
r |
|
О
x
M(t) |
|
• Рассмотрим движение точки М |
||
v S |
вдоль траектории |
|||
r |
• Пройденный путь равен s ~ r |
|||
M(t+ t) |
• Введем среднюю скорость |
|||
|
||||
r (t t) |
vav |
|
r |
|
|
y |
vav |
t |
|
|
|
|||
•Переходя здесь к пределу t → 0, получим мгновенную скорость точки
|
|
|
r |
|
dr |
|
v |
lim vav lim |
t |
dt |
r |
||
|
t 0 |
t 0 |
|
|
||
• Скорость материальной точки – это векторная кинематическая характеристика точки, определяющая быстроту изменения ее положения относительно данной системы координат и равная производной от радиус- вектора точки по времени. Вектор скорости точки направлен по касательной к траектории в сторону ее движения.
. ОПРЕДЕЛЕН Е ССС |
90 |
2.1. КИНЕМАТИКА ТОЧКИ |
|