

Новосибирский Государственный Архитектурно- Строительный Университет (Сибстрин)
ПРОГРАММА по теоретической механике для бакалавров
(направление строительство) (2-й семестр) на 2012 г.
Составитель:
докт. физ.-мат. наук, профессор Рудяк Валерий Яковлевич
Кафедра теоретической механики |
2 |
|

Экзамен по теоретической механике
На экзамен выносится два раздела:
•статика
•кинематика
1.1. ВВЕДЕНИЕ |
2 |
I. Статика
I.1. Аксиомы статики
3
1.1. Аксиомы статики
•Задачи статики
•Основные модели в механике: материальная точка, ТТ,ДТ
•Сила
•Система сил
•Равные силы
•Эквивалентные системы сил
•Уравновешенная система сил
•Аксиомы статики
•Определение связи
•Сила реакции связи
•Типы связей
•Аксиома связей
I. СТАТИКА |
4 |
1.1.1. Основные задачи статики
• Первая задача состоит в замене данной системы
сил, приложенных к твердому телу, эквивалентной системой сил
• Вторая задача заключается в формулировании
условий равновесия тела под действием данной системы сил
• Есть и другие: (i) определение условий
устойчивости движения или равновесия;
(ii) определение возможных положений равновесия; и т.д.
1.1. АКСИОМЫ СТАТИКИ |
5 |
1.2. Основные модели механики
•Любой объект (тело) можно моделировать материальной точкой, если его внутренней структурой можно пренебречь, а расстояние L до него много больше его размеров R: L >> R
•Любое тело можно моделировать системой взаимодействующих материальных точек
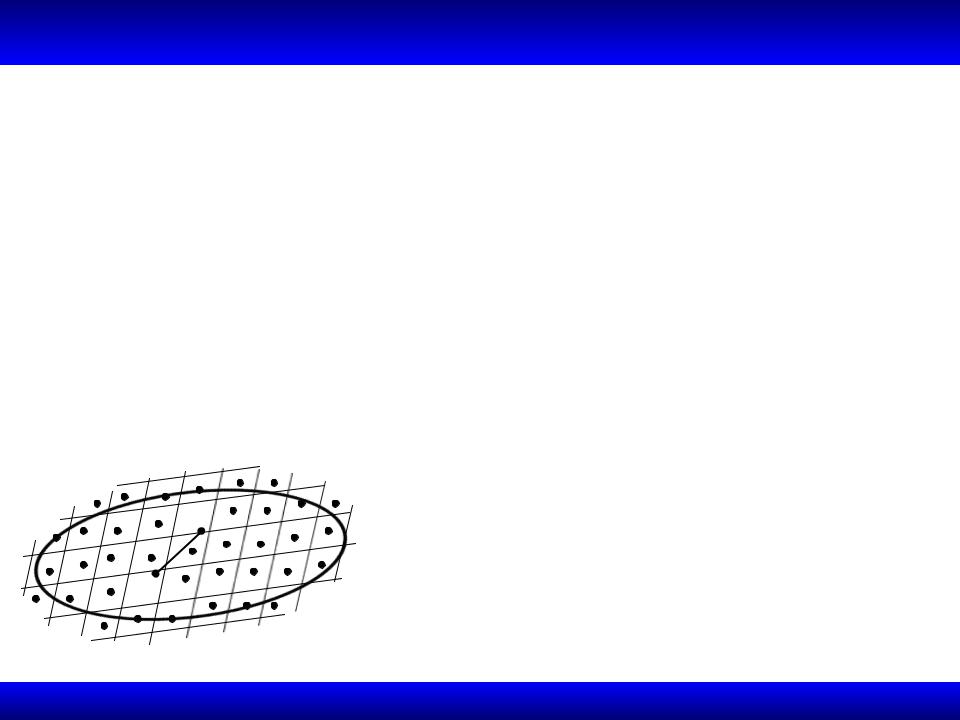
• Твердое тело – система взаи-
|
модействующих материальных |
|
|
j |
|
i |
точек, расстояние между |
|
которыми не меняется |
||
|
||
|
со временем: rij (t) = const |
11.2. . ОСНОВНЫЕАКСИМЫ ПОНЯТСТАТИКИЯ МОДЕЛИ |
6 |

1.1.2. Основные модели механики
•Деформируемое тело – система взаимодействующих материальных точек, расстояние между которыми
стечением времени меняется
•Деформируемое тело можно моделировать твердым на временах t << T, где Т – время деформации
•Механическая система – совокупность взаимодействующих или свободных материальных точек или тел
11.1.2. ОСНОВНЫЕАКСИОМЫПОНЯТИЯСТАТИКИИ МОДЕЛИ |
7 |

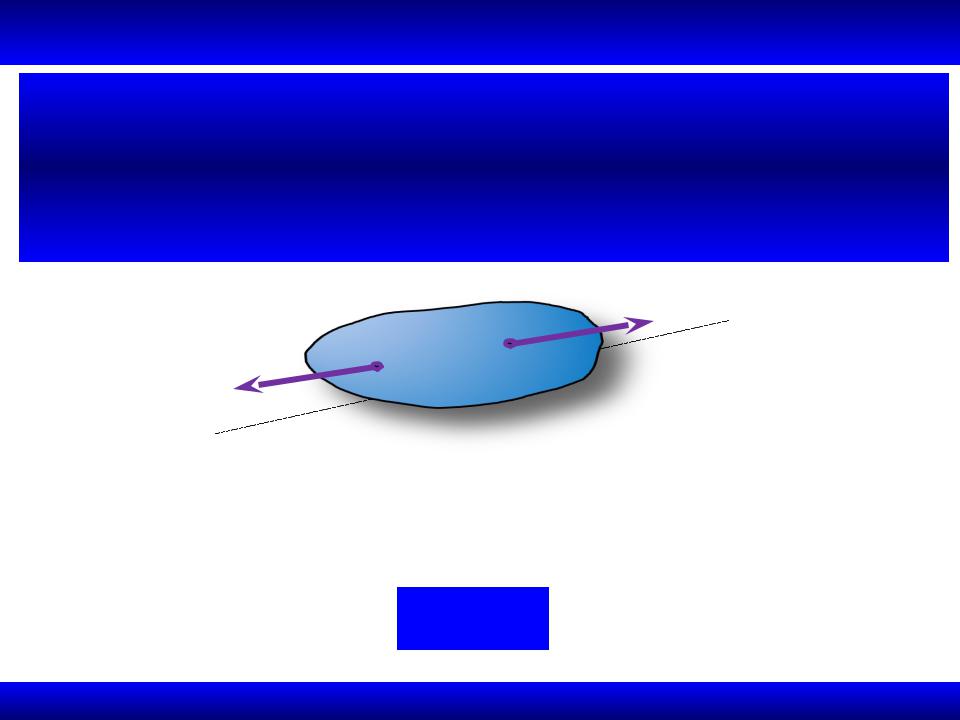
1.1.3. Сила
Сила – величина, характеризующая меру взаимодействия материальных объектов (тел)
Силы возникают
•при непосредственном контакте тел (точечные и распределенные силы)
•при наличии силовых полей (действуют в каждой точке пространства)
•Сила – векторная величина. Ее
|
F |
действие характеризуется |
|
модулем, точкой приложения |
|
А |
M |
|
|
и направлением |
|
|
|
|
L |
|
• Прямая, вдоль которой направ- |
|
лена сила (LM), называется |
|
|
|
|
|
|
линией действия силы |
11.2. . ОСНОВНЫЕАКСИОМЫПОНЯТИЯСТАТИКИИ МОДЕЛИ |
8 |

1.1.4. Система сил
• Совокупность нескольких сил, (F1, F2 ,..., Fn ) , называется
системой сил
• Если действие на тело системы сил (F1, F2 ,..., Fn ) можно заменить действием другой системы (P1, P1,..., Pk ) , то такие
системы сил называются эквивалентными
•Если система сил эквивалентна одной силе (F1, F2 ,..., Fn ) ~ R, то последняя называется равнодействующей
•Две одинаково направленные силы, приложенные к одной точке и равные по модулю, называются равными
•Система сил называется уравновешенной (эквивалент-
ной нулю) (F1, F2 ,..., Fn ) ~ 0, если под ее действием тело покоится или равномерно и прямолинейно двигается
11.1.2. ОСНОВНЫЕАКСИОМЫПОНЯТИЯСТАТИКИИ МОДЕЛИ |
9 |
Аксиома 1. Равновесие тела под действием двух сил
Твердое тело находится в равновесии под действием двух сил тогда и только тогда, когда эти силы равны по модулю и противоположно направлены (линии действия при этом совпадают)
В |
F1 |
M |
|
||
|
|
F2 А
L
Эта аксиома определяет простейшую уравновешенную систему сил, т.е. систему сил, эквивалентную нулю
(F1;F2 ) ~ 0
11.1.23..АКСИОМЫОСНОВНЫЕКСИОМЫ СТАТИКИПОНЯТИЯСТАТИКИИ МОДЕЛИ |
10 |