

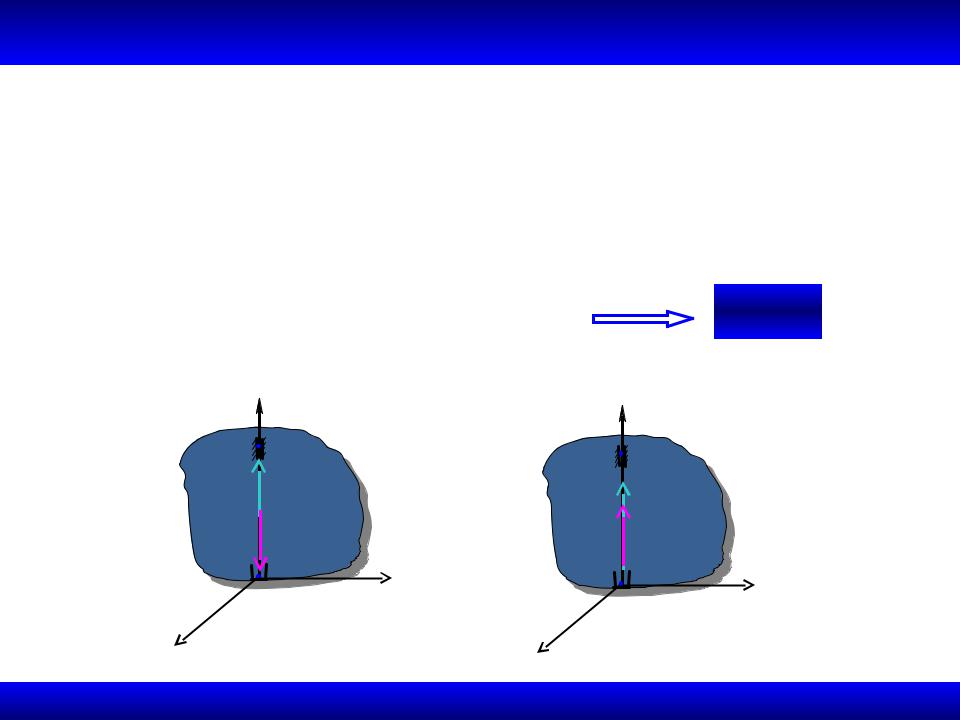
2.2.6. Угловая скорость
|
z |
z1 |
|
|
• |
Закон движения имеет вид: (t) |
||||||
|
A |
|
|
|||||||||
|
|
|
B(t) |
|
• |
За промежуток времени t тело повернется на |
||||||
|
K |
|
φ |
B(0) |
||||||||
|
|
|
|
угол φ |
|
|
|
|
|
|
||
|
|
|
|
y1 |
|
|
cp |
|
|
|
||
|
|
k |
|
|
|
t |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
||
|
O |
|
|
φ |
|
• Переходя к пределу, получим мгновенную |
||||||
|
|
|
|
|
y |
угловую скорость |
|
|
d |
|
||
|
|
|
|
|
|
|
|
|
|
|||
|
φ |
|
|
|
|
lim cp lim |
|
|
||||
x |
|
|
|
|
|
t 0 t |
|
dt |
|
|||
x1 |
|
|
|
|
t 0 |
|
||||||
|
|
|
|
|
|
|||||||
|
|
• Угловая скорость измеряется в радианах в секунду или числом |
||||||||||
|
|
оборотов в минуту |
n |
|
|
|
|
|
||||
|
|
|
|
|
|
2 n |
|
|
|
|
|
|
|
|
|
|
|
|
60 |
30 |
|
|
|
|
|
• Вектор угловой скорости ω направлен вдоль оси вращения в сторону, откуда это вращение видно происходящим против часовой стрелки
k
ВЕКТОРНЫЙ1. ОПРЕДЕЛЕНСПОСОБЕ ССС |
ЗАДАНИЯ ДВИЖЕНИЯ ТОЧКИ. |
101 |
2.2. КИНЕМАТИКА ТТ |
|
|
2.2.9. Угловое ускорение
• Если за промежуток времени t угловая скорость тела изменяется на ω, то можно ввести среднее угловое ускорение тела за время t
|
|
|
|
cp |
|
|
|||
|
|
|
|
t |
|
|
|||
|
|
|
|
|
|
|
|
|
|
• Переходя к пределу, получим мгновенное угловое ускорение |
|||||||||
|
|
|
|
d |
|
d |
2 |
|
|
|
|
|
|
|
k |
||||
|
|
|
|
|
|||||
lim cp lim |
|
|
|
|
|
|
|
|
|
t |
dt |
dt2 |
|
||||||
t 0 |
t 0 |
|
|
|
|
||||
|
|
|
|
||||||
• Размерность угловой скорости и углового ускорения: [ ] 1/ c, [ ] 1/ c2
z A |
z A |
|
|
|
|
O |
O |
y |
y |
x • Замедленное вращение x |
• Ускоренное вращение |
ВЕКТОРНЫЙ1. ОПРЕДЕЛЕНСПОСОБЕ ССС |
ЗАДАНИЯ ДВИЖЕНИЯ ТОЧКИ. |
102 |
2.2. КИНЕМАТИКА ТТ |
|
|
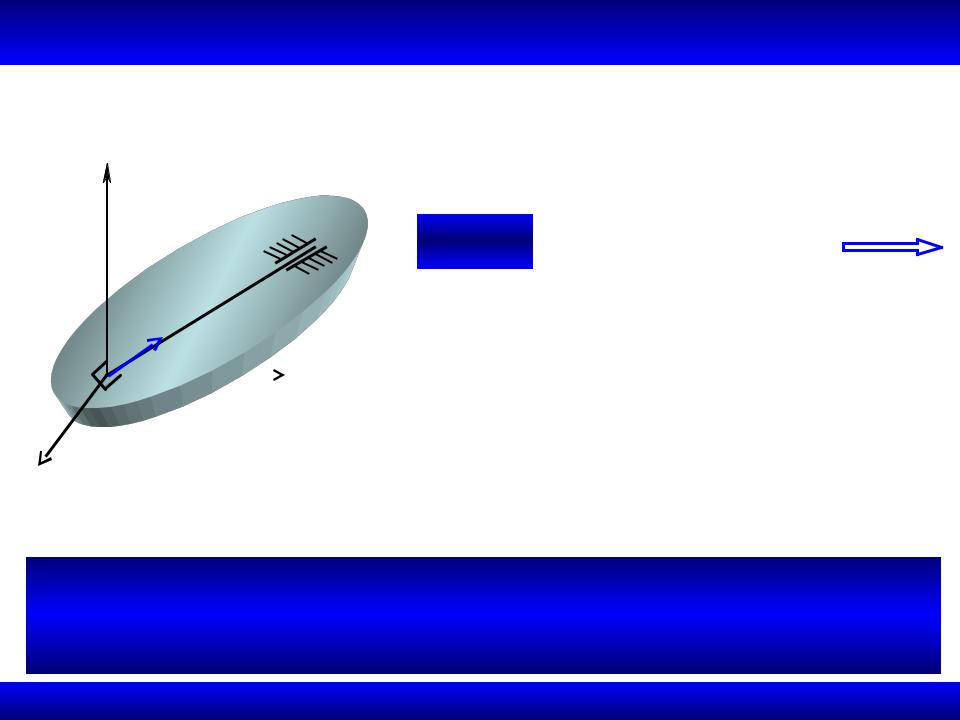
2.2.10. Скорость и ускорение точек ТТ
|
|
|
|
|
|
|
|
|
|
|
|
|
rB |
|
|
|
|
|
||||||
|
Действительно, |
|
vB RB |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
i |
j |
k |
|
|
|
|
|
i |
|
|
j |
k |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
0 0 |
|
|
|
0 0 |
|
|
vB RB |
|
||||||||||||||
|
rB |
RB |
|
|
jxB i yB |
|
||||||||||||||||||
|
|
|
|
|
|
xB |
yB |
zB |
|
|
|
|
xB |
yB |
0 |
|
|
|
|
|
||||
|
• Определим теперь ускорение точки В |
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
d |
|
|
|
|
d |
|
|
|
|
drB |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
aBaB |
|
|
|
rB |
|
|
rB |
|
|
|
rB vB |
rB ( rB ) |
|||||||||||
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
dt |
|
|
|
|
dt |
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
aB z

 A
A

 aBr
aBr 



 K
K









 B
B





 aс
aс
 rB B
rB B
O 

 x
x 
ar |
r |
– вращательное ускорение |
B |
B |
|
|
|
|
|
|
ar |
r sin( ,r |
) R |
|
|
|
|
|
|
B |
B |
B |
B |
|
aс |
v |
( r ) |
– центростремительное |
||||
|
B |
|
|
B |
|
B |
ускорение |
|
|
ac |
v |
|
2 R |
|
|||
y |
B |
|
|
|
||||
|
B |
|
B |
|
|
|||
ВЕКТОРНЫЙ1. ОПРЕДЕЛЕНСПОСОБЕ ССС |
ЗАДАНИЯ ДВИЖЕНИЯ ТОЧКИ. |
103 |
2.2. КИНЕМАТИКА ТТ |
|
|
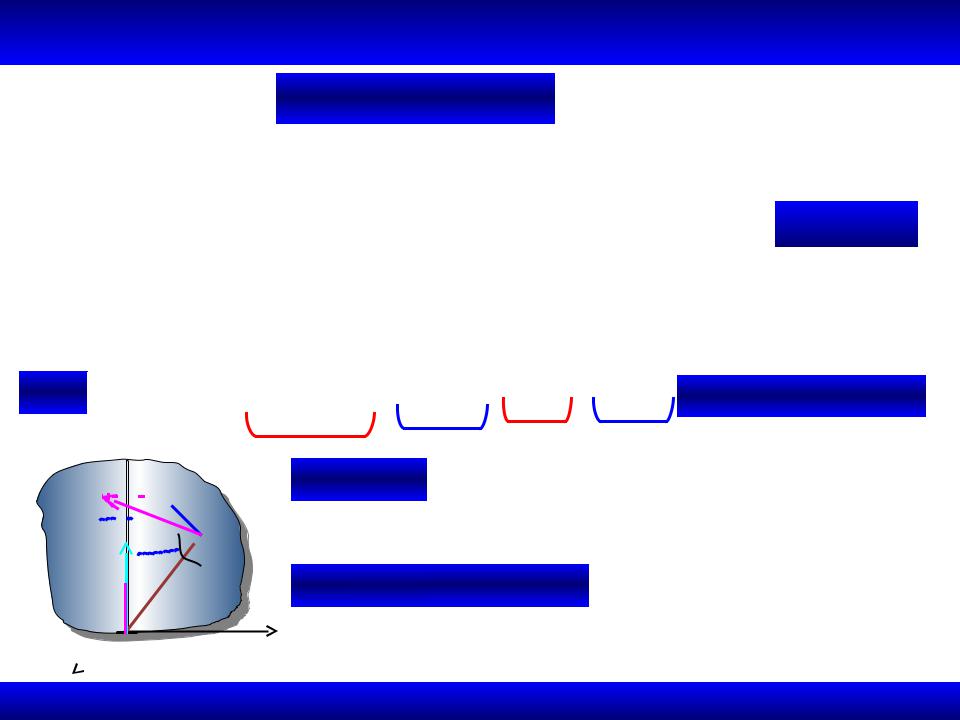
2.2.11. Вращение относительно произвольной оси
• В общем случае твердое тело может вращаться относительно оси , не сов- падающей по направлению ни с одной из осей данной системы координат
• |
Угловая скорость вращения тела вокруг оси l |
z |
снова можно определить соотношением |
|
A |
|
|
|
|
|
|
l , но |
l lxi ly j lzk |
||||
|
|
|
||||
|
|
|
|
|
j z k , |
где |
O l |
xi y |
|||||
x lx , |
y ly , |
z lz |
||||
|
|
• Если lx=ly=0, то тело вращается вокруг оси Oz и, |
||||
|
|
y |
||||
|
|
|
|
|
|
|
x |
как мы установили, z , где φ – угол поворота |
|||||
тела вокруг этой оси |
|
|||||
|
|
|
|
|||
• Аналогично, если ввести углы поворота тела φ , φ и относительно двух |
||||||
других осей, то x |
|
x |
y |
|
||
lx x , y ly |
y , z lz z |
|||||
Т.о., вращение тела относительно произвольной оси можно представить как суперпозицию вращений относительно трех осей неподвижной декартовой системы отсчета
ВЕКТОРНЫЙ1. ОПРЕДЕЛЕНСПОСОБЕ ССС |
ЗАДАНИЯ ДВИЖЕНИЯ ТОЧКИ. |
104 |
2.2. КИНЕМАТИКА ТТ |
|
|
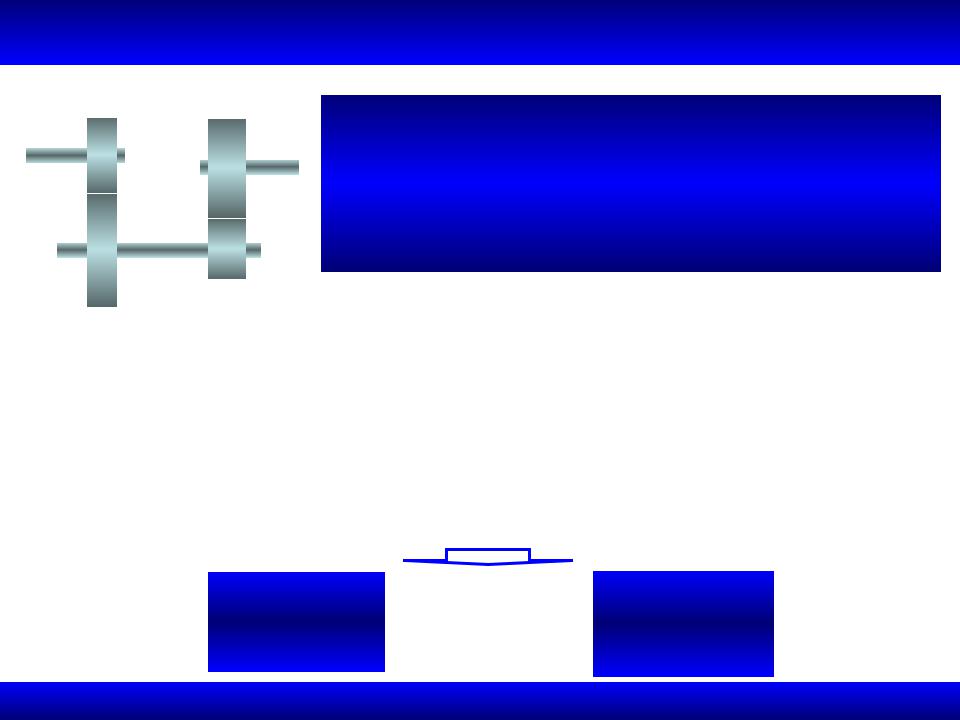
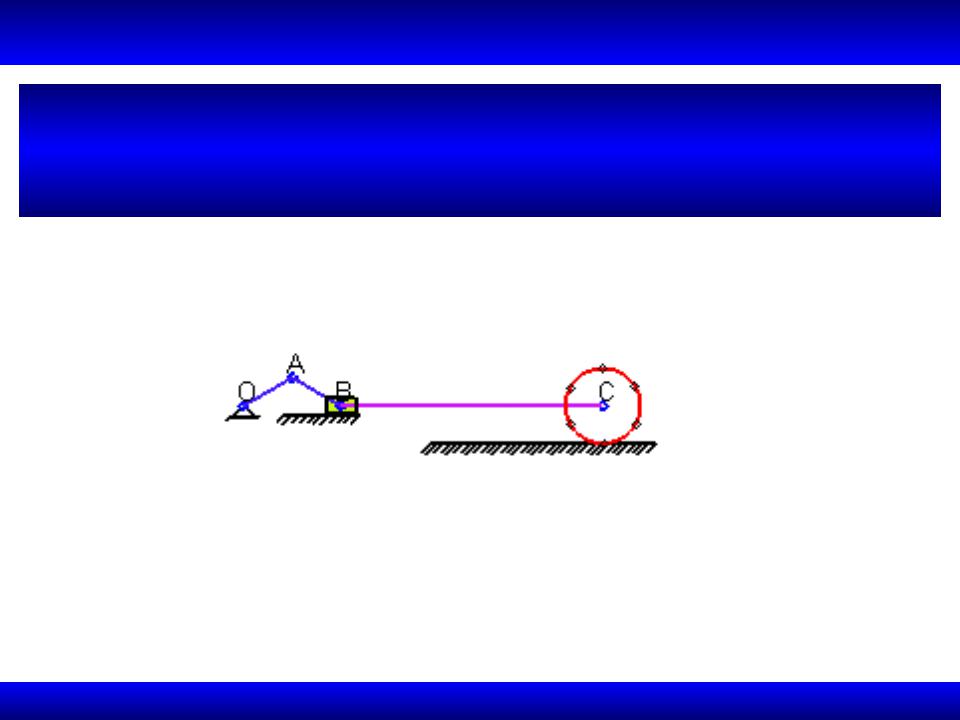
2.2.12. Передаточные механизмы
1 |
|
4 |
|
|
|
Вал I вращается с угловой скоростью ω1. |
||||
I |
|
|
|
|
|
|
|
|
Подбирая радиусы колес, можно, таким |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
II |
|
Определить угловую скорость вращения вала |
|||
|
|
|
|
|
|
|
|
|
|
образом, по заданной угловой скорости |
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
II, если радиусы колес (шестерней) |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
I вала I получить любую наперед |
|
|
|
|
|
|
|
|
B |
|
механизма равны r1, r2, r3, r4. |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
заданную скорость II вала II |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Решение |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
• Колесо 1 жестко скреплено с валом I, поэтому |
|||
2 |
|
|
||||||||
|
|
|
|
|
|
|
I = 1 |
|||
|
|
|
|
|
|
|
|
|
|
|
• Аналогично 4 = II
• Приравнивая скорости в точках A и B контакта колес, получим
|
|
v A 1r1 2 r2 , |
vB 3r3 4 r4 . |
|||||||
• Учитывая, что колеса 2 и 3 жестко скреплены, получаем 2 = 3 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
r1r3 |
1 |
или |
|
II |
r1r3 |
I |
|
|
|
|||||||||
|
|
|
|
|
||||||
|
|
|
r2 r4 |
|
|
|
r2r4 |
|
||
7.3. СКОРОСТЬ ТОЧКИ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
105 |
||||||
2.2. КИНЕМАТИКА ТТ |
|
|||||||||
II. Кинематика
2.3. Плоское движение ТТ
106

2.3. Плоское движение ТТ
•Задание движения
•Скорости точек тела при плоском движении
•Теорема о проекциях скоростей двух точек тела
•Мгновенный центр скоростей
•Ускорение точек при плоском движении
12.24..КИНЕМАТИКАОССВЯЗИОВНЫЕИ РЕАКЦИИПОНЯТИЯСВЯЗЕЙИ МОДЕЛИ |
107 |
2.3.1. Определение и мотивация
Движение твердого тела называется плоским (плоскопарал- лельным), если все точки тела движутся в плоскостях, параллельных некоторой неподвижной плоскости
Иллюстрация работы кривошипно-шатунного механизма. Передача движения колесу
2.31. ПЛОСКОЕОПРЕДЕЛЕНИЕДВИЖЕНИЕССС ТВЕРДОГО ТЕЛА |
108 |
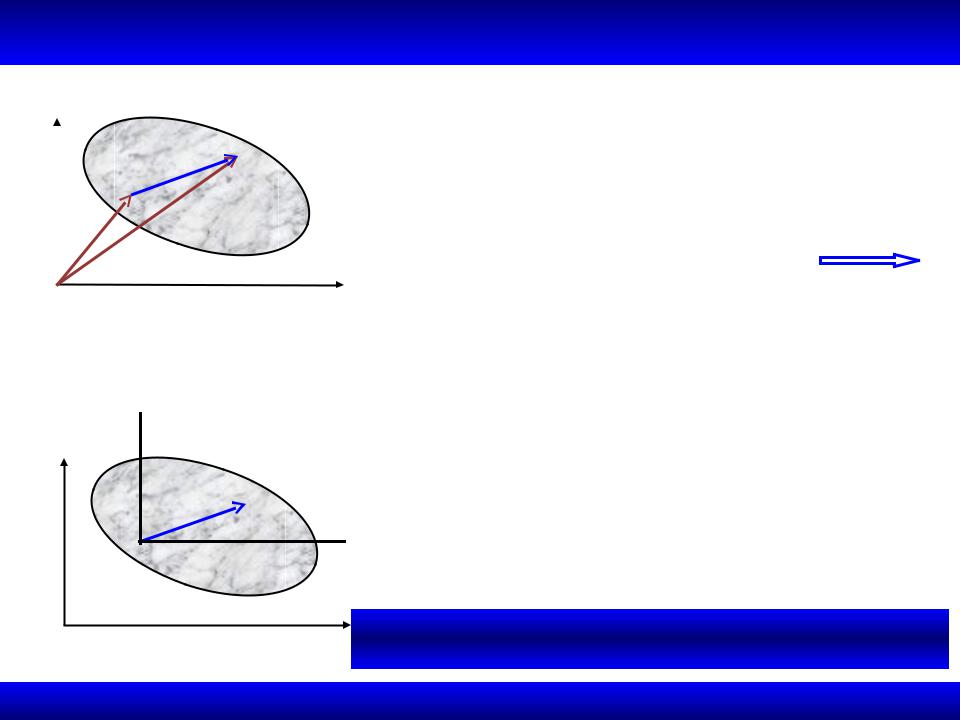
2.3.2. Уравнение плоского движения
|
|
|
|
|
|
• |
Будем описывать движение сечения S |
||||||||
y |
|
S |
|
rBA |
|
|
относительно неподвижной системы координат |
||||||||
|
|
|
|
||||||||||||
|
|
|
B |
• |
Oxy, жестко связанной с плоскостью P |
||||||||||
|
|
|
|
|
Положение сечения относительно этой системы |
||||||||||
|
rA |
|
А |
|
|
||||||||||
|
|
|
|
|
координат определяется положением какого- |
||||||||||
O |
|
rB |
|
|
x |
либо принадлежащего ему отрезка AB |
|||||||||
|
|
|
|
|
(x |
|
x |
|
)2 ( y |
|
y |
|
)2 r2 |
||
|
|
|
|
|
|
|
B |
A |
B |
A |
|||||
|
|
|
|
|
|
|
|
|
|
|
BA |
||||
•Т.о., плоское движение ТТ слагается из поступательного движения вместе с полюсом и вращения вокруг полюса
х1 
y
А |
|
φ B |
|
||
|
|
S у1 |
O |
|
x |
•Этим степеням свободы соответствует движение вдоль осей Оу и Ох и вращение относительно некоторой точки
 • Введем вспомогательную систему координат с началом в точке А (полюсе) тела и осями Ax1 , Ay1 , параллельными соответствующим осям
• Введем вспомогательную систему координат с началом в точке А (полюсе) тела и осями Ax1 , Ay1 , параллельными соответствующим осям
xA |
xA (t), |
yA yA (t), |
(t) |
|
неподвижной системы координат |
|
|
|
|
|
|
2.3. ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА |
109 |

2.3.3. Теорема о скоростях точек ТТ
|
|
|
х1 |
|
|
М |
|
• |
Скорость произвольной точки М находится |
||||||||
|
|
|
|
|
|
|
дифференцированием закона движения |
||||||||||
y |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
rM (t) rA (t) (t) |
|
|
||||||
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
φ |
|
|
|
|
|
|
|||||||
|
|
rM |
|
|
|
у1 |
|
|
|
|
|
|
|
|
|
||
|
|
А |
|
|
|
|
dr |
d |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|||||||||
O |
|
|
rA |
|
|
|
|
x |
vM rM |
|
A |
|
dt |
vM vA |
vMA |
||
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|||
где введена скорость движения точки М относительно полюса А |
|
|
|||||||||||||||
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
vM |
vA B |
|
|
||||||||
|
|
vMA |
|
|
vB |
|
|
|
|
|
|||||||
|
|
dt |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Скорость произвольной точки М ТТ, совершающего плоское движение, геометрически складывается из скорости какой-нибудь другой точки А, принятой за полюс, и скорости этой точки в ее вращении вместе с телом вокруг полюса
2.3. ПЛОСКОЕ ДВИЖЕНИЕ ТТ |
110 |