

1.Статистически неопределимые системы.
Системы, в которых количество наложенных связей больше, нежели число независимых уравнений равновесия, называются статически неопределимыми.
По сравнению со статически определимыми системами, в статически неопределимых системах имеются дополнительные связи, которые называются лишними.
Термин “лишние связи” является условным. Эти связи являются лишними с точки зрения расчетных предпосылок. В действительности эти связи создают дополнительные резервы для конструкций, как в плане обеспечения её жесткости, так и прочности.
На рис. 2.5, а изображен кронштейн, состоящий из двух стержней, шарнирно скрепленных между собой. В связи с тем, что на конструкцию действует лишь вертикальное усилие Р, а система является плоской (т.е. все элементы конструкции и вектор внешних сил лежат в одной плоскости), получается, что усилия в стержнях легко определяются из условий равновесия узла А, т.е.
åx = 0, åy = 0. (2.16)
Раскрывая эти уравнения, получаем замкнутую систему линейных уравнений относительно неизвестных усилий N1 иN2 в которой количество уравнений равно количеству неизвестных:
-N1 - N2 sin a = 0; -N2 cos a - Р = 0.
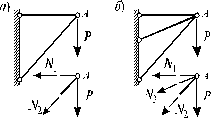
Рис. 2.5
Если конструкцию кронштейна усложнить, добавив еще один стержень (рис. 2.5, б), то усилия в стержнях N1, N2 и N3прежним способом определить уже не удастся, т.к. при тех же двух уравнениях равновесия (2.16) имеются уже три неизвестных усилия в стержнях. В таких случаях говорят, что система один раз статически неопределима. Разность между числом неизвестных усилий и количеством независимых (значащих) уравнений равновесия, связывающих эти усилия, называется степенью статической неопределимости рассматриваемой системы.
В общем случае под n-раз статически неопределимой системой понимается система, в которой число неизвестных внешних опорных реакций и внутренних усилий превышает число независимых и значащих уравнений равновесия наn единиц.
2.Основные законы статики. Связи и реакции связи.
Ста́тика (от греч. στατός, «неподвижный») — раздел механики, в котором изучаются условия равновесия механических систем под действием приложенных к ним сил и моментов.
Законы:
Не нарушая механического состояния тела, к нему можно приложить или отбросить уравновешенную систему сил.
О действии и противодействии. При всяком действии одного тела на другое со стороны другого тела имеется равное противодействие, такое же по величине, но противоположное по направлению.
О двух силах. Две силы, приложенные к одному и тому же телу, взаимно уравновешены (их действие эквивалентно нулю) тогда и только тогда, когда они равны по величине и действуют по одной прямой в противоположные стороны.
О равнодействующей. Равнодействующая двух сил, приложенных к одной точке, приложена к той же точке и равна диагонали параллелограмма, построенного на этих силах как сторонах.
Аксиома затвердевания. Если деформируемое тело находилось в равновесии, то оно будет находиться в равновесии и после его затвердевания.
Аксиома о связях. Механическое состояние системы не изменится, если освободить её от связей и приложить к точкам системы силы, равные действовавшим на них силам реакций связей.
Связи и их реакции
Все законы и теоремы статики справедливы для свободного твердого тела. Все тела делятся на свободные и связанные. Свободные тела - тела, перемещение которых не ограничено. Связанные тела - тела, перемещение которых ограничено другими телами. Тела, ограничивающие перемещение других тел. называются связями. Силы, действующие от связей и препятствующие перемещению, называются Реатщями связей Реакция связи всегда направлена с той стороны, куда нельзя перемещаться. Всякое связанное тело можно представить свободным, если связи заменить их реакциями (принцип освобождения от связей). Все связи можно разделить на несколько типов: Связь - гладкая опора (без трения).
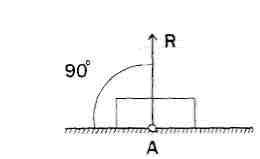
Реакция опоры приложена в точке опоры и всегда направлена перпендикулярно опоре. Гибкая связь (нить, веревка, трос, цепь). Груз подвешен на двух нитях. Реакция нити направлена вдоль нити от тела, при этом нить может быть только растянута. Шарнирная опора. Шарнир допускает поворот вокруг точки закрепления. Различают два видашарниров. Подвижный шарнир. Стержень, закрепленный на шарнире, может поворачиваться вокруг шарнира, а точка крепления может перемещаться вдоль направляющей. Реакция подвижного шарнира направлена перпендикулярно опорной поверхности т.к ремонт холодильников стинол . не допускается только перемещение поперек опорной поверхности Неподвижный шарнир. Точка крепления перемещаться не может. Стержень может свободно поворачиваться вокруг оси шарнира. Реакция такой опоры проходит через ось шарнира, но неизвестна по направлению. Ее принято изображать в виде двух составляющих: горизонтальной и вертикальной (Rx; Ry). Защемление или «заделка» Любые перемещения точки крепления невозможны, под действием внешних сил в опоре возникают реактивная сила и реактивный момент MR, препятствующий повороту. Реактивную силу принято представлять в виде двух составляющих вдоль осей координат. Проекция силы на ось Проекция силы на ось определяется отрезком оси, отсекаемым перпендикулярами, опушенными на ось из начала и конца вектора Fx =Fcos a Величина проекции силы на ось равна произведению модуля силы на косинус угла между вектором силы и положительным направлением оси. Таким образом, проекция имеет знак: положительный при одинаковом направлении вектора СИЛЫ и ОСИ и отрицательный при направлении в сторону отрицательной полуоси