

1.6.3. Механизм свободного расцепления
Механизм предназначен для отключения и удержания во включенном состоянии аппарата. Схема механизма свободного расцепления представлена на рис. 1.41. Он состоит из трех рычагов (звенья 1-3), соединенных шарнирами2,3между собой и шарнирами1,4с неподвижным основанием. В шарнире1на звене1жестко закреплен шток, соединенный с контактной системой. При повороте штока происходит размыкание контактов. На звено1постоянно действует момент силМпр, создаваемый предварительно поджатой пружиной. На рис. 1.41 сплошными линиями показано взведенное положение механизма, когда контакты замкнуты. Расположение звеньев механизма с небольшим прогибом в шарнире3обеспечивает при отсутствии силыPприжатие звена2к упору под действием момента пружиныМпр. СилаPприводит в действие механизм расцепления и обычно создается электромагнитом или другим устройством, которое срабатывает, например, при превышении тока уставки аппарата. Эта сила поднимает шарнир3выше точки неустойчивого равновесия, где звенья2и 3находятся на одной прямой, и механизм начинает движение под действием момента приложенного к звену1момента до устойчивого положения, показанного на рисунке пунктирной линией. В этом положении звенья2и3удерживаются вытянутыми вдоль прямой линии усилием звена1.
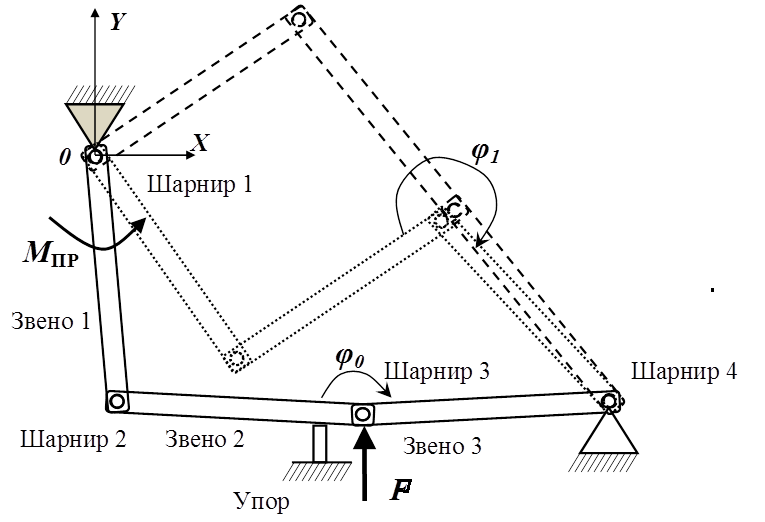
Рис. 1.41. Схема механизма свободного расцепления.
Имитационная модель для анализа динамики работы механизма свободного расцепления, созданная с помощью инструментов Matlab Simulink (Simscape SimMechanics) [26] показана на рис. 1.42.Основные элементы модели:звено, шарнир, упор, момент пружины и сила. Звено – это стержень, который в модели представлен элементомBody : твердое тело с массойm, моментом инерции относительно центра массJ, координатами центра масс и координатами точек присоединения к шарнирам. Модель шарнира составлена из элементаCustom Jointс одной степенью свободы вращения. Момент, действующий на звено1относительно оси шарнира1, задан элементомJoint Spring & Damperкак пружина кручения с предварительным поджатием. Импульс силы формируется элементамиPulse GeneratorиBody Actuator, подключенными к звену2 в месте шарнира3. К этому же шарниру подключен упор, ограничивающий угол относительного вращения звеньев2и3в диапазоне от начального до максимального.
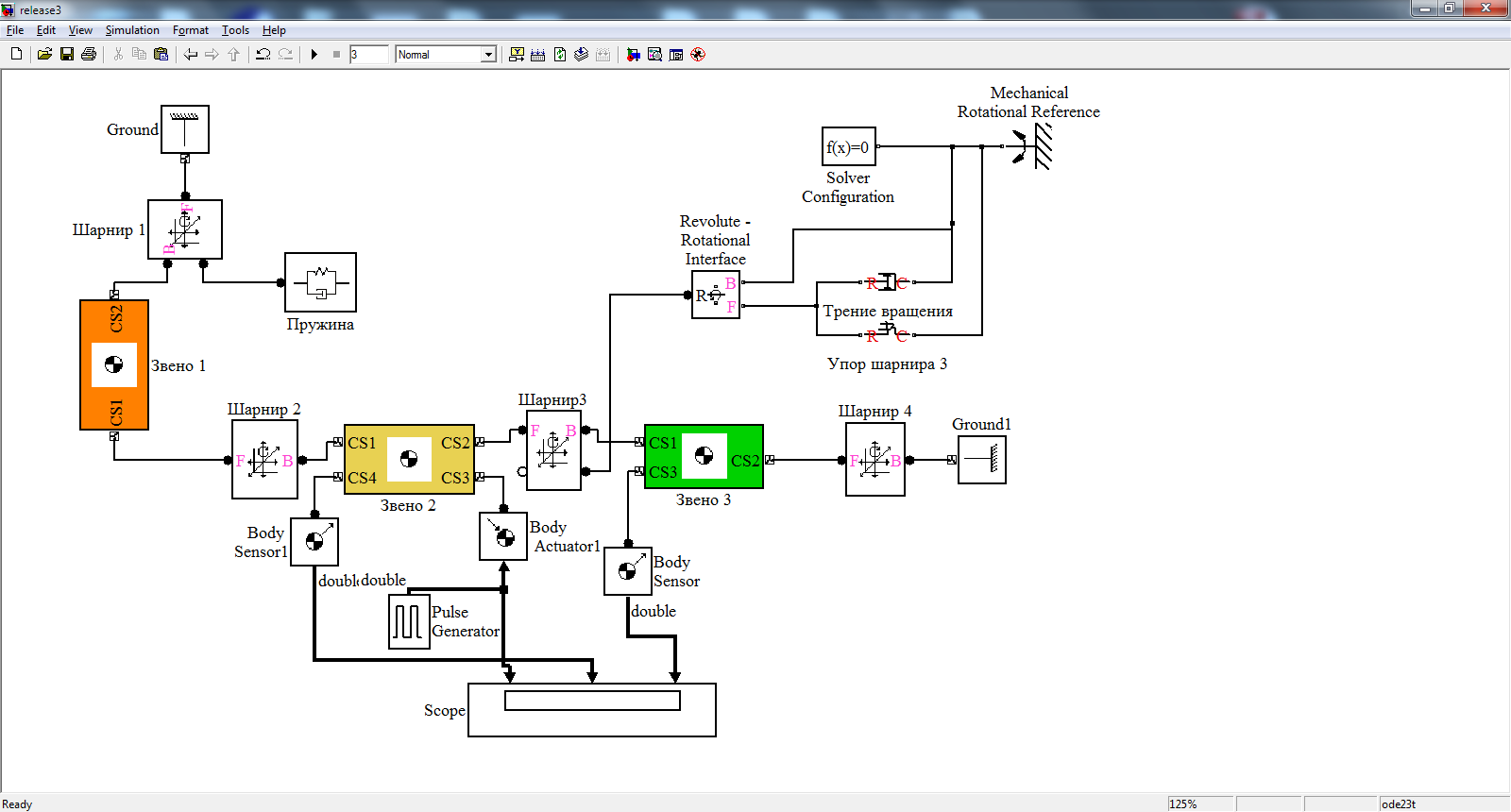
Рис. 1.42. Имитационная модель для анализа динамики работы механизма свободного расцепления с помощью инструментов Matlab Simulink (Simscape SimMechanics).
Динамику работы устройства иллюстрируют рассчитанные осциллограммы процессов перемещения шарниров 1и2, приведенные на рис. 43. Там же показан импульс силыP, воздействующий на шарнир3. На рис. 43,апроцесс при снятом верхнем ограничении на относительный угол поворота звеньев2и3. Конечное положение деталей устройства изображены пунктирной линией на рис. 1.41. На рис. 1.43,бвведено ограничение на максимальный относительный угол разворота звеньев2и3– 80 градусов. В этом случае конечное положение деталей устройства изображено на рис. 1.41 точечной линией. Осциллограммы показывают изменение во времени координатXиYшарниров, по которым можно определить время срабатывания расцепителя.
|
a) |
б) |
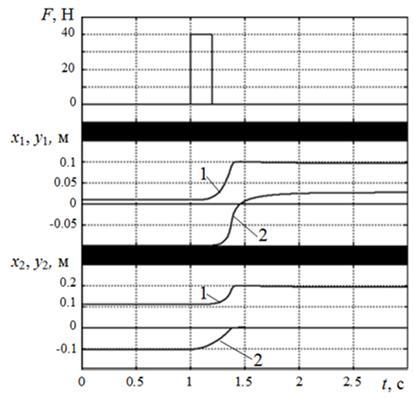
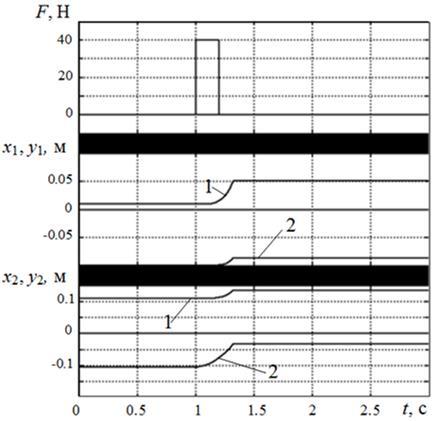
Рис. 1.43. Осциллограммы (а, б) процессов перемещения шарниров 1 и 2.