

1.4.6. Топологические уравнения. Построение эквивалентных схем
Топологические уравненияопределяют структуру всех подсистем рассматриваемой системы и записываются для однородных фазовых переменных каждой подсистемы в отдельности. Взаимосвязь между различными подсистемами при построении макромодели системы задается через зависимые источники фазовых переменных и зависимые параметры пассивных элементов – зависимые от переменных другой подсистемы. Использование макромоделей с сосредоточенными элементами предоставляет удобную возможность записать топологические уравнения на основе условий равновесия и непрерывности.
Условия равновесия выражаются через фазовые переменные типа потока, а условия непрерывности – через переменные типа потенциала. Форма уравнений одинаковая для любой подсистемы. Следует иметь в виду, что топологические уравнения указанного типа справедливы только для стационарных или квазистационарных режимов, когда допустимо предположение о мгновенном распространении возбуждения по линиям связи (не учитываются волновые процессы).
В электрической подсистеме условия равновесия определяется первым законом Кирхгофа (сумма токов подсоединенных к узлу ветвей равна нулю), а уравнение непрерывности — вторым законом Кирхгофа (в замкнутом контуре сумма напряжений на элементах равна нулю):
 ,
,
 ,
,
где
 — число ветвей, подсоединенных к
— число ветвей, подсоединенных к -му
узлу;
-му
узлу; — число элементов в
— число элементов в – ом контуре;
– ом контуре; – ток в
– ток в -ой
ветви
-ой
ветви -го
узла;
-го
узла; – напряжение на
– напряжение на -ом
элементе
-ом
элементе -го
контура.
-го
контура.
Аналогичные соотношения справедливы для других подсистем при замене на соответствующие фазовые переменные.
В магнитной подсистеме сумма магнитных потоков в узле магнитной цепи равна нулю и сумма магнитных напряжений на элементах при обходе по контуру магнитной цепи равна нулю:
 ,
,
 .
.
В механической
поступательной подсистеме имеет место
принцип Даламбера: сумма действующих
на тело сил, включая инерционные, равна
нулю:
 .
Для координатных составляющих абсолютных
скоростей справедливо соотношение:
.
Для координатных составляющих абсолютных
скоростей справедливо соотношение: .Аналог электрического узла в механике
— это тело, а контур определяется
механическими связями, которые указываются
на кинематической схеме устройства. В
обращенной модели фазовые переменные
меняются местами и топологические
уравнения сохраняются.
.Аналог электрического узла в механике
— это тело, а контур определяется
механическими связями, которые указываются
на кинематической схеме устройства. В
обращенной модели фазовые переменные
меняются местами и топологические
уравнения сохраняются.
В механической подсистеме вращательного движения для тела: сумма всех моментов равна нулю и сумма угловых скоростей тел, составляющих связанный контур, вдоль оси вращения равна нулю:
 ,
,
 .
.
В тепловой
подсистеме: сумма тепловых потоков в
узле разветвления равна нулю и сумма
разностей температур при обходе по
замкнутому контуру равна нулю:
 ,
, .
.
Для анализа процессов на основе макромоделей составляются эквивалентные схемы, обычно в широко распространенных пакетах прикладных программ (Matlab, Pspiсeи др), которые автоматически формируют системы расчетных уравнений и осуществляют их решение.
Эквивалентная схема системы — это совокупность схем электрических цепей, представляющих элементы и их связи во всех выделенных подсистемах в соответствии с принятой таблицей аналогий. Составление эквивалентной схемы производится в следующей последовательности [12].
1. На основании анализа конструкции электромеханического устройства выделяют подсистемы: электрическую, магнитную, механическую и другие, которые необходимо включить в общую модель. Если в какой-либо подсистеме имеется несколько функционально независимых частей или подсистема характеризуется сложной разветвленной структурой, то она условно разделяется на простые участки, построение эквивалентных схем для которых не будет вызывать затруднений. Разрывы связей заменяются вспомогательными источниками фазовых переменных.
2. В каждой подсистеме определяются значимые для последующего анализа элементы, обосновываются их электрические аналоги, представляются структуры связей в подсистемах в виде эквивалентных схем электрических цепей.
3. Устанавливаются связи между подсистемами, которые выражаются функциями источников фазовых переменных и пассивных элементов от фазовых переменных других взаимосвязанных подсистем. Например, вынуждающая сила в механической подсистеме будет функцией магнитного потока магнитной подсистемы, а магнитное сопротивление будет функцией перемещения якоря электромагнита.
Построение электрической, магнитной и тепловой эквивалентной схемы обычно не вызывает затруднений, так как распределение электрических токов, магнитных и тепловых потоков просто определяется по заданной конструкции устройства. Некоторые затруднения возникают в разветвленной механической подсистеме. Алгоритм построения эквивалентной схемы прямой модели по заданной кинематической схеме для одной координатной составляющей движения можно представить в виде графа со следующими этапами.
Всем массам присваиваются номера: 1,2,3,…и т.д. Нумеруются в той же последовательности точки, не обладающие массами, но где требуется определение скорости. Скорости этих масс и точек буду определены относительно неподвижного основания.
Неподвижному основанию присваивается номер 0.
Всем остальным элементам механической подсистемы: пружинам, трениям, источникам сил и скоростей, присваиваются индексы, указывающие тип элемента и номера масс, точек или неподвижного основания, между которыми они подсоединены. Например: пружина Пр 1-2, трениеТр 2-0, источник силыИF 3-6, источник скоростиИV 3-1.
На рисунке изображаются точки с номерами элементов из п.п. 1,2. Это вершины графа.
Вершины графа соединяются линиями – ребрами графа, заменяющими элементы, пронумерованные в п.3. Указывается обозначение каждого ребра.
Вершины с номерами масс соединяются дополнительно с вершиной, определяющей неподвижное основание ребрами с наименованием М i-0, гдеi – номер вершины.
Вместо ребер изображаются соответствующие элементы: М – конденсатор с емкостьюm,Пр – катушка индуктивности с индуктивностью
 ,Тр – резистор с сопротивлением
,Тр – резистор с сопротивлением ,ИF -
источник тока с током, равным приложенной
силеP,ИV– источник ЭДС с напряжением, равным
заданной скоростиV.
,ИF -
источник тока с током, равным приложенной
силеP,ИV– источник ЭДС с напряжением, равным
заданной скоростиV.
Потенциалы вершин графа будут скоростями масс или выбранных точек, а токи в ребрах – силами на элементах кинематической схемы.
Для вращательного движения алгоритм построения эквивалентной схемы сохраняется, но с заменой масс на моменты инерций, линейных скоростей на угловые, сил на моменты и линейных трений и упругих элементов на угловые.
На рис. 1.27, а. изображена кинематическая схема механического узла. На ней указаны принятые обозначения элементов. На рис. 1.27,б. показана схема соединений узлов ветвями в соответствии с пунктами 46 алгоритма, а на рис. 1.27,в. окончательный вид эквивалентной схемы после замены ветвей элементами.
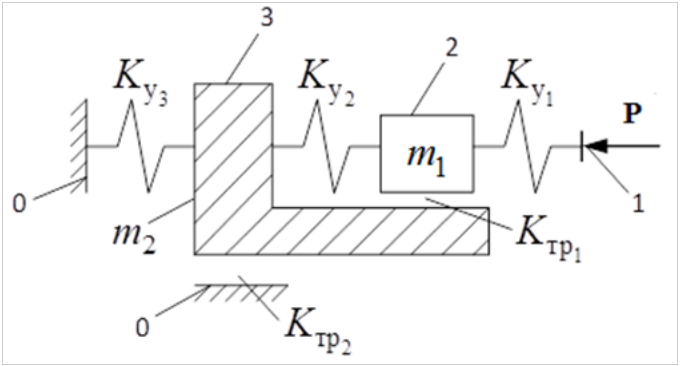
а)
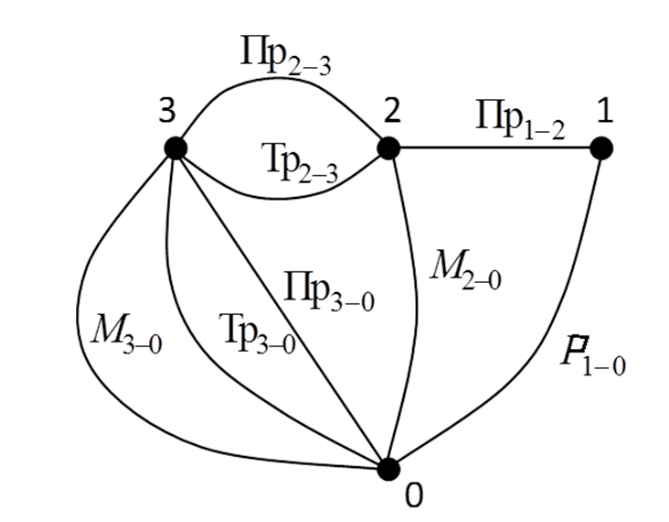
б)
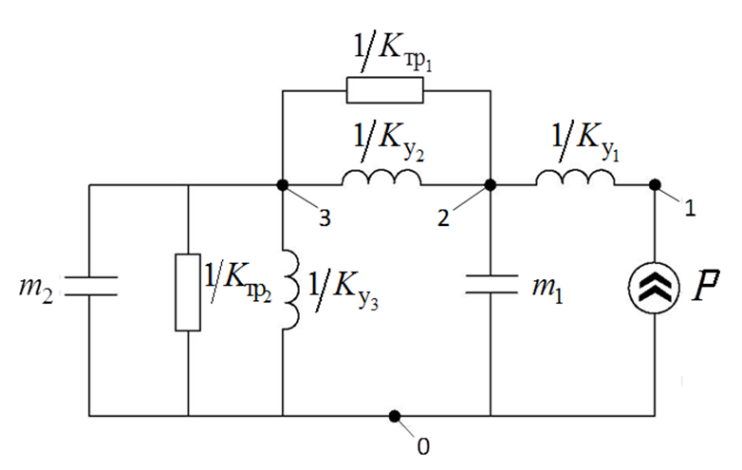
в)
Рис. 1.27. Построение эквивалентной схемы по кинематической схеме механического узла: а – кинематическая схема; б – схема соединения узлов; в – эквивалентная схема.