

1.6. Механические узлы электрических аппаратов
1.6.1. Механизмы электрических аппаратов
Механические узлы электрических аппаратов отличаются большим многообразием конструктивного исполнения и обычно содержат следующие основные части: приводной механизм, передаточный и исполнительный механизм. Кроме того, применяются буферно-противоударные механизмы, механизмы выдержки времени и др.
Приводные механизмы создают движущую силу или момент сил, которые могут быть получены ручным приводом, т.е. человеком, электромагнитами, электрическими двигателями, пружинными, гравитационными, пневматическими, гидравлическими и другими устройствами. Различные приводы, использующие электромагнитное поле, рассматриваются в последующих разделах.
Передаточные механизмы осуществляют механическую связь между приводом и исполнительным механизмом аппарата. Передача механической энергии может осуществляться с одновременным преобразованием сил, моментов, скоростей, изменений направления движений на плоскости и в пространстве, преобразований поступательного и вращательного движений. Такие действия осуществляются как с помощью жестких рычажно-шарнирных механизмов и зубчатых передач, гибких связей (ленты, ремни, цепи) и гидропневматических трансмиссий, бесконтактных магнитных механизмов.
Исполнительные механизмы в электрических аппаратах - это контактные системы, механизмы регулируемых силовых воздействий и перемещений. Контактные системы обеспечивают необходимый раствор (зазор) контактов в разомкнутом положении, провал контактов, определяемый силой поджатия контактов в замкнутом состоянии, проскальзывание или перекатывание контакта для улучшения электрического контакта и ресурса работы контактов.
Буферно-противоударные механизмы служат для поглощения кинетической энергии, накапливаемой в механических узлах электрических аппаратах при ударах и других резких изменениях параметров движения, а также устройства, ограничивающие накопление кинетической энергии. К ним относятся амортизаторы и демпферы, построенные на различных физических принципах преобразования механической энергии в тепловую энергию: деформация эластичной среды, пневматические и гидравлические устройства рассеяния энергии при движении в узких каналах. Рассмотрим примеры механизмов электрических аппаратов, содержащие типовые элементы и узлы.
1.6.2. Блок щелчковых контактов
Кинематическая схема механического узла блока щелчковых контактов реле, представленного на рис. 1.36.
|
|
|
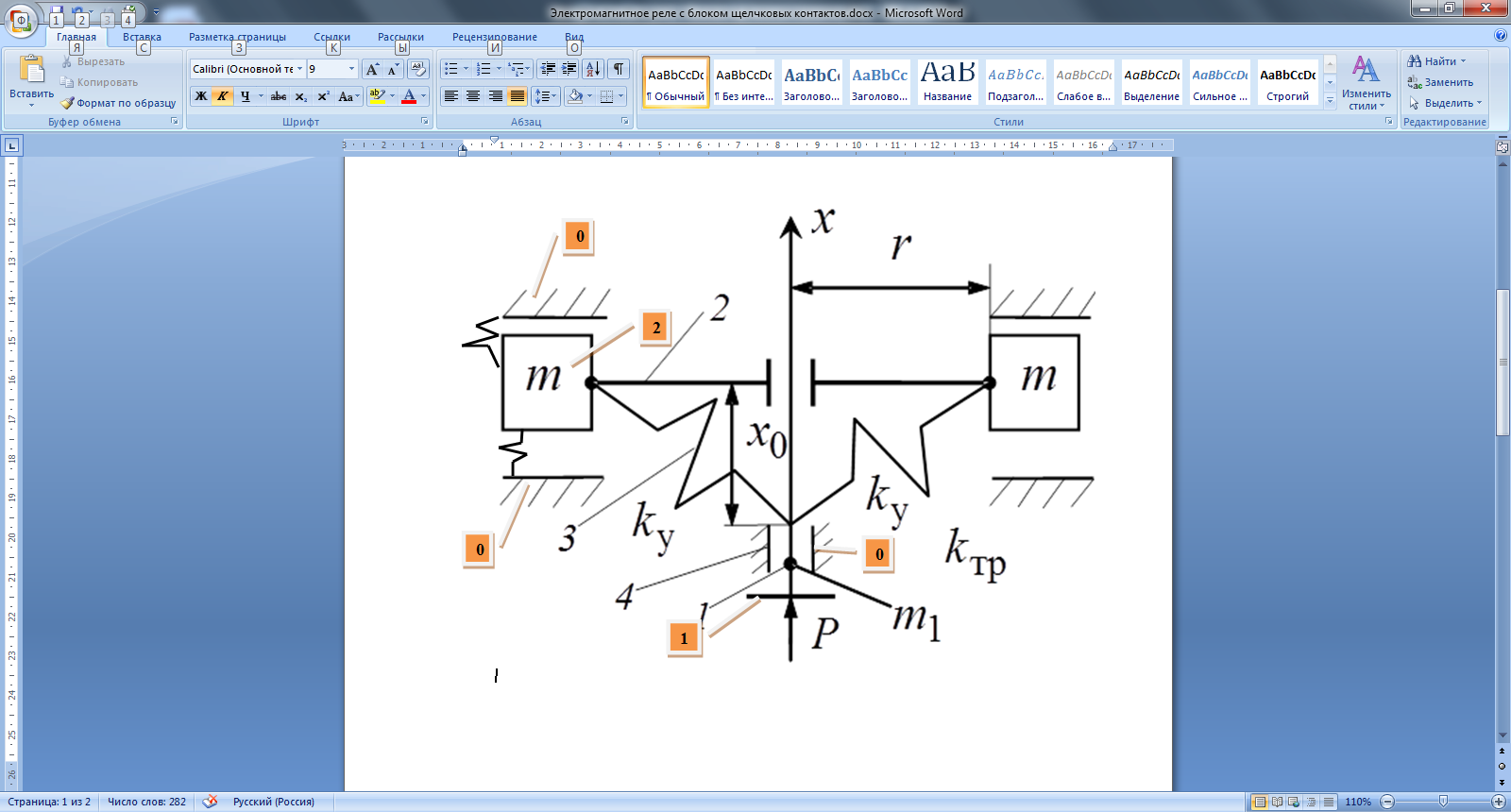
Рис. 1.36. Кинематическая схема механического узла блока щелчковых контактов.
Этот механический
узел состоит из штока 1массы ,
который двигается в опоре скольжения4 с коэффициентом вязкого тренияkтр. К штоку подсоединены под
углом две симметричные пружины3 с
жесткостью
,
который двигается в опоре скольжения4 с коэффициентом вязкого тренияkтр. К штоку подсоединены под
углом две симметричные пружины3 с
жесткостью .
Эти пружины связаны с контактной рейкой2 массой
.
Эти пружины связаны с контактной рейкой2 массой и перемещают ее. Сила
и перемещают ее. Сила прикладывается к штоку вдоль его оси.
При движении штока вверх контактная
рейка перескакивает с верхнего
неподвижного контакта на нижний. При
обратном движении штока контактная
рейка перескакивает в противоположном
направлении. Неподвижные контакты
представим моделями упоров, т.е.
подсоединим между подвижным и неподвижным
контактом упругий элемент - пружину,
которая скачкообразно изменяет свои
свойства (см. рис. 1.36). Когда нет касания
контактов, эта пружина отключена, при
касании пружина подсоединяется. Жесткость
пружины
прикладывается к штоку вдоль его оси.
При движении штока вверх контактная
рейка перескакивает с верхнего
неподвижного контакта на нижний. При
обратном движении штока контактная
рейка перескакивает в противоположном
направлении. Неподвижные контакты
представим моделями упоров, т.е.
подсоединим между подвижным и неподвижным
контактом упругий элемент - пружину,
которая скачкообразно изменяет свои
свойства (см. рис. 1.36). Когда нет касания
контактов, эта пружина отключена, при
касании пружина подсоединяется. Жесткость
пружины должна быть достаточно велика, чтобы
моделировать небольшую упругую
податливость неподвижного контакта.
Кроме того, необходимо ввести в модель
такого упора элемент диссипации энергии
- вязкое трениеRП,
который будет поглощать энергию удара.
Эквивалентная схема модели упора
приведена на рис. 1.37.
должна быть достаточно велика, чтобы
моделировать небольшую упругую
податливость неподвижного контакта.
Кроме того, необходимо ввести в модель
такого упора элемент диссипации энергии
- вязкое трениеRП,
который будет поглощать энергию удара.
Эквивалентная схема модели упора
приведена на рис. 1.37.
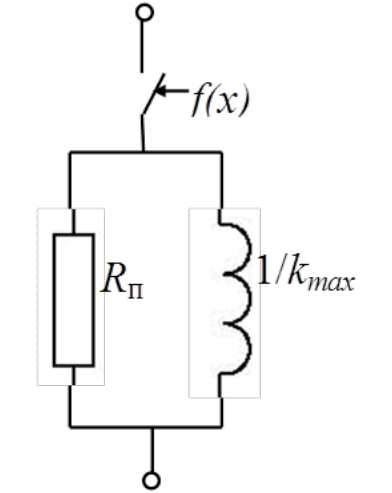
Рис. 1.37. Эквивалентная схема модели упора.
В схеме упора
присутствует идеальный ключ, который
управляется функцией расстояния до
упора
 .
Для модели механизма за фазовую переменную
типа потенциала принята скорость, а за
фазовую переменную типа потока — сила.
.
Для модели механизма за фазовую переменную
типа потенциала принята скорость, а за
фазовую переменную типа потока — сила.
Составим граф кинематической схемы устройства (рис. 1.38). Присвоим номера тем деталям механизма, где необходимо определить скорость (см. рис. 1.36). Это будут вершины графа: номер 1- шток; номер2- контактная рейка. Неподвижным деталям присваиваем номер0. Элементы механизма представляются ребрами графа. Массы подвижных деталей (шток и контактная рейка) включаются в соединения с неподвижным основанием. Приводящая в движение шток силаРтакже имеет отсчет от неподвижного основания. К неподвижному основанию подсоединяются ребра графа, обозначающие трение штока в опоре скольжения и упоры контактной рейки – неподвижные контакты. Шток и контактная рейка соединены пружиной с нелинейными свойствами как функции относительного положения штока и контактной рейки.
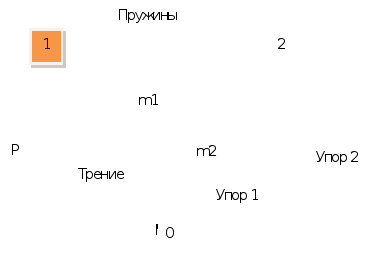
Рис. 1.38. Граф кинематической схемы блока контактов.
В соответствии с
составленным графом построим эквивалентную
схему узла блока щелчковых контактов
в Matlab Simulink (SimPower Systems) [26] (рис.
1.39). В ней силаР– источник тока,
массы – конденсаторы с емкостями, равными
массам, вязкое трение – резистор с
сопротивлением
– конденсаторы с емкостями, равными
массам, вязкое трение – резистор с
сопротивлением ,
упоры представлены своими эквивалентными
схемами, а пружина – функцией силы от
положения контактной рейки относительно
штока - управляемым источником токаРу.
,
упоры представлены своими эквивалентными
схемами, а пружина – функцией силы от
положения контактной рейки относительно
штока - управляемым источником токаРу.
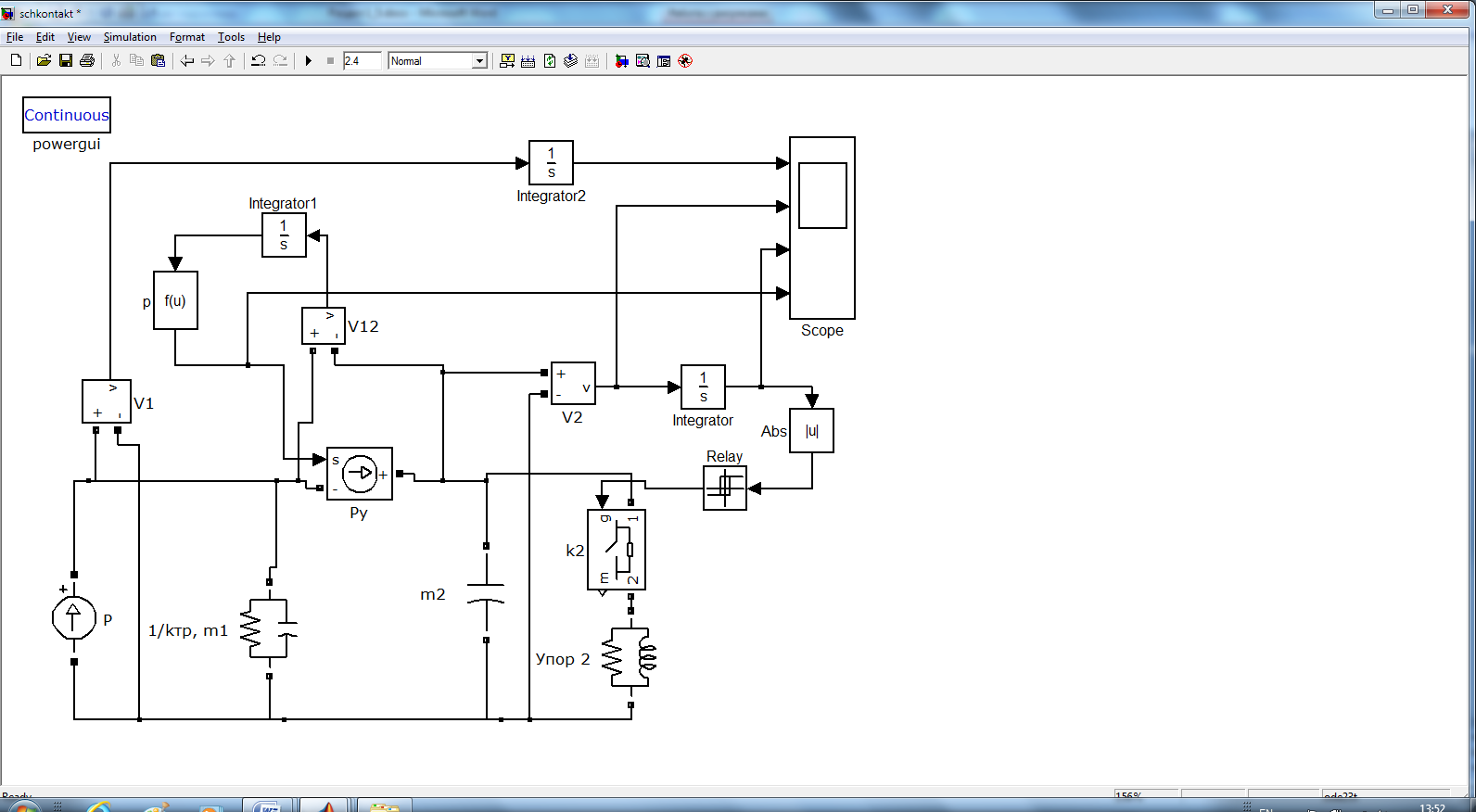
Рис. 1.39. Эквивалентная схема блока щелчковых контактов в Matlab Simulink.
Сила
 вычисляется
по формуле
вычисляется
по формуле
 ,
,
где
 — нижнее начальное положение штока
относительно контактной рейки, при
котором усилие пружин равно нулю. При
движении штока результирующая упругая
сила пружин по оси
— нижнее начальное положение штока
относительно контактной рейки, при
котором усилие пружин равно нулю. При
движении штока результирующая упругая
сила пружин по оси принимает
нулевые значения три раза: при
принимает
нулевые значения три раза: при .
Причем в положении
.
Причем в положении контактная рейка находится в неустойчивом
равновесии и малое смещение штока
приводит к перебрасыванию рейки в
противоположном движению направлении.
В эквивалентной схеме расчет силы
реализован с помощью измерения
относительной скорости движения штока
и контактной рейки вольтметром
контактная рейка находится в неустойчивом
равновесии и малое смещение штока
приводит к перебрасыванию рейки в
противоположном движению направлении.
В эквивалентной схеме расчет силы
реализован с помощью измерения
относительной скорости движения штока
и контактной рейки вольтметром ,
интегратором (1/s) скорости для расчета
перемещения и блоком функцииРу.
Идеальные ключи упоров управляются
значениями перемещений контактной
рейки и срабатывают при касании
неподвижных контактов. Для этого
вольтметром
,
интегратором (1/s) скорости для расчета
перемещения и блоком функцииРу.
Идеальные ключи упоров управляются
значениями перемещений контактной
рейки и срабатывают при касании
неподвижных контактов. Для этого
вольтметром измеряется
скорость контактной рейки, далее она
интегрируется -получается перемещение.
Перемещение в релейном блоке (Rele)
сравнивается с положением неподвижных
контактов и при их совпадении выдается
сигнал на включение ключа упора.
измеряется
скорость контактной рейки, далее она
интегрируется -получается перемещение.
Перемещение в релейном блоке (Rele)
сравнивается с положением неподвижных
контактов и при их совпадении выдается
сигнал на включение ключа упора.
На рис. 1.40 приведены
осциллограммы перемещений штока и
контактной рейки, а также скорости
контактной рейки и усилия пружин,
рассчитанные для следующих исходных
данных: x0=5
мм; r=10 мм;
m=0.02 кг; m1=0.04
кг; Kу=1e4
Н/м; Ктр=100 кг/с; раствор
контактов в среднем положении .
На шток воздействует периодическая
сила
.
На шток воздействует периодическая
сила .
.
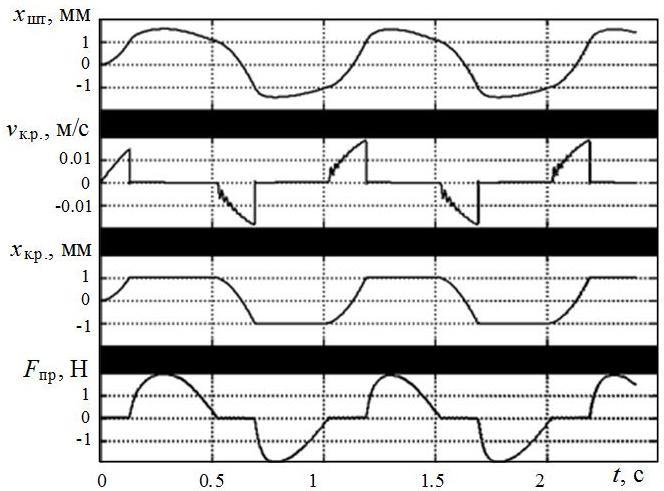
Рис. 1.40. Осциллограммы перемещения штока, скорости контактной рейки, перемещения контактной рейки и усилия пружин.
Осциллограммы показывают время срабатывания блока щелчковых контактов, амплитуду движения штока и другие параметры.