

Лекции по дифференциальным уравнениям (Абрамов А.А
.).pdf1. Основные определения и простейшие свойства |
|
|
|
|
81 |
||||||
Существование решения задачи Коши следует из предыдущей главы. |
|
||||||||||
Теорема: Пусть '~(t) решение системы (1), C const. Тогда |
|
|
|
|
|||||||
|
|
|
~(t) = '~(t + C) решение (1): |
|
|
|
|
||||
|
d~(t) |
|
d'~(t + c) |
|
~ |
|
~ |
|
|
~ ~ |
|
Доказательство: |
dt |
= |
dt |
t+c= |
|
|
|
|
= |
|
( ) |
|
|
|
|
= f '~(t) = f '~(t + c) |
|
|
f |
t |
|||
Теорема: Пусть '~(t) и ~(t) решения (1). Пусть '~(t1) = ~(t2). Тогда '~(t) = ~(t + t2 t1) для всех t, для которых обе части равенства определены.
Доказательство: !~(t) = ~(t+t2 t1). Тогда !~(t) решение (1), !~(t) = ~(t+t2 t1) = ~(t2) =
'~(t1).
n |
!~(t) решение (1) |
o^n!~(t1) = '~(t1) |
) !~(t) = '~(t)o |
'~(t) решение (1) |
в силу единственности решения задачи Коши.
Определение: Область G называется фазовым пространством системы дифференциальных
~
уравнений (1), графики (в G) решений фазовыми траекториями, векторы f(~y) фазовыми
скоростями. Фазовое пространство вместе с фазовыми траекториями и фазовыми скоростями, называется фазовым портретом системы дифференциальных уравнений (1).
2.Положение равновесия автономной системы дифференциальных уравнений (1)
Определение: Точка A называется положением равновесия автономной системы дифференциальных уравнений (1), если ~y(t) ~a решение (1).

82 ГЛАВА 4. АВТОНОМНЫЕ СИСТЕМЫ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
Теорема: |
~a |
положение равновесия |
(1) |
, |
~ |
~. |
|||||||||||
|
|
|
|
|
|
|
|
|
|
d~a |
|
|
f(~a) = 0 |
||||
) : ~y(t) ~a |
решение |
(1) |
, |
|
|
~ |
. ~ |
~ |
|
||||||||
dt |
|
|
|||||||||||||||
|
|
|
|
|
|
|
= f(~a) |
f(~a) = 0 |
|
||||||||
|
|
, |
|
d~y |
|
d~a |
|
~ |
~ |
|
|
~ . |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
( : ~y(t) = ~a |
|
dt = |
dt |
= 0 = f(~a) = f(~y) |
|
|
|||||||||||
2. Классификация положений равновесия линейной автономной системы 2 порядка.
В качестве области определения рассматриваем всю плоскость ~y.
1. Рассмотрим систему |
|
|
|
|
|
|
d~y |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
~ |
|
|||
|
|
y2 |
, A = k a21 |
|
dt |
= A~y + b; |
. |
|||||||||
A è B const. ~y = |
a22 |
k; b = |
b2 |
|||||||||||||
|
|
y1 |
|
новое |
a11 |
a12 |
|
|
|
. |
|
b1 |
|
|||
~a положение |
равновесия, |
= ~y |
старое |
|
|
~a |
|
|||||||||
|
|
|
~y |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
d~y |
|
|
|
|
|
|
|
|
|
|
|
~ положение равновесия, |
|
|
|
|
|
|
|
|
|
|
|
|
||||
0 |
|
|
|
|
dt |
= A~y |
|
|
|
|
|
|
|
|
|
|
Далее 1; 2 собственные значения матрицы A.
1. 1; 2 вещественные, отличны от 0, разных знаков. Тогда сущестует вещественный базис
~ ~
h1; h2 из собственных векторов матрицы A.
1; 2 координаты в этом базисе. Наша система приводится к следующему виду:
d 1 = 1 1 dt
d 2 = 2 2 dt
1 = C1e 1t; xi2 = C2e 2t;
ãäå C1; C2 Const.
Положение равновесия, соответствующее этому случаю, называется седлом.

2. Классификация положений равновесия линейной автономной системы 2 порядка. |
83 |
~~
2.1; 1 отличны от нуля, различны, одного знака. Тогда существует h1:h2 базис из собственных векторов A, 1; 2 координаты.
d 1 = 1 1 dt
d 2 = 2 2 dt
1 = C1e 1t; 2 = C2e 2t;
ãäå C1; C2 Const.
Мы рассмотрим два разных случая.
(a) 1, 2 отрицательны, для определ¼нности 1 < 2 < 0.
lim |
1(t) |
= |
C1 |
lim |
e 1t |
= 0 |
||
|
|
|
|
|
||||
2(t) |
|
|
|
|||||
t!+1 |
|
C2 t!+1 e 2t |
|
|||||
Такое положение равновесия называется устойчивым узлом.
(b)1; 2 положительны, для определ¼нности 0 < 2 < 1.
В этом случае надо поменять t ! t, и получается предыдущий случай. Полу-
чится та же самая картинка, движение будет осуществляться в противоположном направлении.
84ГЛАВА 4. АВТОНОМНЫЕ СИСТЕМЫ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
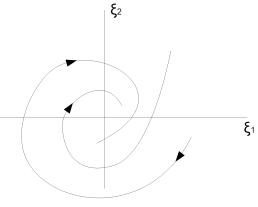
3.1; 2 не вещественные, с вещественной частью, отличной от 0.
1 = + i |
; |
6= 0 |
2 = i |
|
6= 0 |
Поскольку мы хотим рисовать вещественным мелом на вещественной доске, делаем следующее: составляем вектор
|
~ |
|
|
||
|
|
|
h1 = ~g + i~g2; |
||
вектор, соответствующий 1. ~g1;~g2 вещественные. |
|||||
Тогда ~ |
вектор, соответствующий 2. ~g1;~g2 линейно независимы, f~g1;~g2g |
||||
h2 = ~g1 i~g2 |
|||||
базис, 1; 2 соответствующие координаты. |
|||||
В координатах 1; 2 наша система привед¼тся к такому виду: |
|||||
|
|
|
d 1 |
= 1 + 2 |
|
|
|
|
dt |
||
|
|
|
|
||
|
|
d 2 |
|
= 1 + 2 |
|
|
|
|
dt |
||
1(t) = C1et sin( t + C2)2(t) = C1et cos( t + C2);
C1; C2 const.
Выкладки предлагается проделать в качестве упражнения.
Далее для определ¼нности > 0. Если оно отрицательное, поменяем местами 1; 2.
(a) < 0
Устойчивый фокус.
(b) < 0
2. Классификация положений равновесия линейной автономной системы 2 порядка. |
85 |
Неустойчивый фокус.
Весь случай целиком называется фокус.
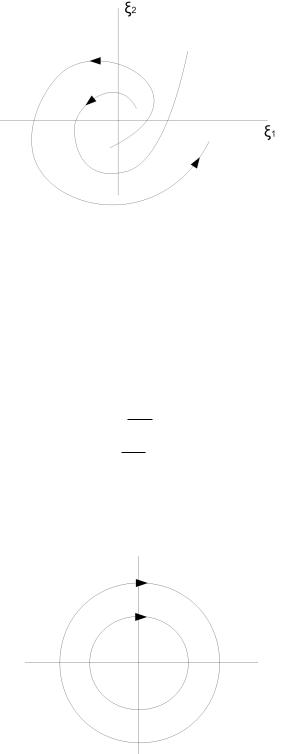
4. 1; 2 невещественные, с нулевой вещественной частью.
1 = i2 i
Как и в пункте 3), строим базис ~g1;~g2, получаем
d 1 = 2 dt
d 2 = 2 dt
1 = C1 sin(t + C2)2 = C1 cos(t + C2)
Для определ¼нности > 0
С точки зрения выкладок это частный случай предыдущего пункта, поэтому выкладки не повторяются.
5.1 = 2 6= 0.
6.1 2 = 0.

86 ГЛАВА 4. АВТОНОМНЫЕ СИСТЕМЫ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
Замечание: В книге Понтрягина детально разобраны все случаи.
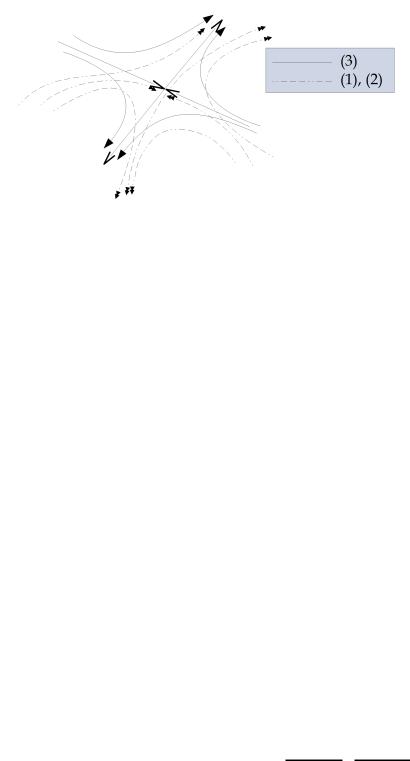
2.Дополнительные замечания
1.Мы рисовали все картинки в том базисе, к которому мы перешли. В исходном базисе ~y1; ~y2, с уч¼том того, что была сделана замена переменной t, картники будут выглядеть так:
Рисуя вс¼ в исходной системе координат, надо тонко уч¼ть вс¼. что связано с переходом
в другую систему координат.
2.Мы провели классификацию, основываясь на предположениях о собственных значениях матрицы. Вопрос что называется неустойчивым узлом? Ответ в духе эти штучки касаются и расходятся , является неверным, так как это всего лишь картинка. Основой классификации является предположение о собственных значениях.
Эта классификация называется классификацией Пуанкаре линейных однородных систем дифференциальных уравнений второго порядка.
3.Все эти случаи разбиваются на два класса: 1)-3) так называемые невырожденные положения равновесия, и 4)-6) так называемые вырожденные положения равновесия.
В ч¼м смысл этого разбиения? Казалось бы, в случае 4) было получено вс¼, и выкладки являлись частным случаем случая 3). Дело в том, что каджое из невырожденных положений равновесия выделяется какими-либо условиями типа неравенства. А в определении каждого из вырожденных положений равновесия фигугирует какое-нибудь условие типа равенства.
Это важно потому что если положение равновеися невырожденное, и мы достоаточно мало меняем исходные данные, то тип положения равновесия не меняется, потому что при достаточно малом изменении исходных параметров эти значения меняются мало (непрерывные функции), а все ограничения в виде неравенств. Значит, тип невырожденного положения равновесия не меняется при достаточно малом изменении исходных параметров.
С другой стороны, для вырожденного положения равновесия это не выполняется. Центр может остаться центром, а может превратиться в фокус.

3. О нелинейных автономных системах дифференциальных уравнений |
87 |
3. О нелинейных автономных системах дифференциальных уравнений
1.Мы рассматриваем общую нелинейную систему
|
|
|
|
|
; f~ = |
:f:1: ; |
|
||
d~y |
= f~(~y); ~y = |
|
y.1 |
|
(1) |
||||
dt |
|||||||||
|
|
|
fn |
|
|
||||
|
|
yn |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
|
|
||
~ |
|
~ |
|
~ |
|
@f |
|
|
|
||||||
t; ~y; f вещественные, f(~y) определена в области G, f, |
|
@~y |
непрерывна в G |
||||||||||||
Åñëè |
~a |
положение равновесия, то |
~y(t) ~a |
решение |
, |
|
~ |
~. |
|||||||
|
|
|
|
|
|
|
|
|
|
f(~a) = 0 |
|||||
Часто используется следующий при¼м: ~y = ~a + ~z, j~zj мало. Тогда |
|
||||||||||||||
|
|
|
|
~ |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
@f |
|
|
|
|
|
||||
|
|
f~(~y) = f~(~a + ~z) = f~(~a) + |
|
|
|
|
(~a)!~z + ~g(~z); j~g(~z)j = o(j~zj): |
||||||||
|
|
|
|
@~y |
|||||||||||
|
|
|
=0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|{z} |
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
{z |
|
} |
|
|
|
|
|
||
d~z |
= A~z + ~g(~z); |
(2) |
|
dt |
|||
|
|
~
A = @@~fy (~a); j~g(~z)j = o(j~zj).
(1) , (2).
d~z |
= A~z |
(3) |
|
dt |
|||
|
|
Определение: (3) получено из (1) линеаризацией в окрестности положения равновесия ~a.
Один из основных при¼мов исследования поведения решений: прежде всего изучаем уравнение
(3), и выясняем нужные нам свойства на этом уравнении, затем стараемся перенести эти результаты на уравнение (2).
2.Пусть n = 2. (Линейная автономная система второго порядка).
Имеет место следующий нетривиально доказываемый факт:
Траектории уравнения (1) в окрестности положения равновесия ведут себя , если положения равновесия системы (3) невырожденное, качественно так же, как и траектории уравнения (3).
88 ГЛАВА 4. АВТОНОМНЫЕ СИСТЕМЫ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
3. Устойчивость по Ляпунову
Определение: Решение ~y(t) ~a и само положение равновесия называется устойчивым по Ляпунову, если:
1. 9q > 0, что при j~y(0) ~aj < q решение может быть продолжено на [0; +1),
2. для любого " > 09 > 0; 6 q, такое, что если j~y(0) ~aj < , то j~y(t) ~aj < " при
0 6 t < +1.
Определение: Устойчивое по Ляпунову решение ~y(t) = ~a уравнения (1), и само положение равновесия ~a называется асимптотически устойчивым, если существует такое 0 < r 6 q
(обозначение q см. в предыдущем определении), что при ~y |
|
~a |
j |
< r имеет место |
lim ~y(t) = |
j (0) |
|
|
t!+1 |
~a.
Упражнение: Рассмотрите те типы, которые были рассмотрены в x2, и выясните, какие из них являются устойчивыми, а какие к тому же асимптотически устойчивыми.
Прежде всего, мы исследуем систему (3).
Теорема: Пусть все собственные значения матрицы A лежат в левой полуплоскости. Тогда
~
решение системы (3) ~z(t) 0 устойчиво по Ляпунову и асимптотически устойчиво.
Доказательство: ~z(t) = etA~z(0) (см. 10 главы 1).
1 |
; B = |
|
J1 . |
.. |
0 |
|
; Js = |
|
1 |
A = CBC |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
Jm |
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10
... ...... |
|
1 |
|
|
|
|
|
|
|
|
|
0s
| {z }
ks
|
|
|
etJ1 |
0 |
|
|
|
|
etA = CetBC 1; etB = |
... |
; |
|
|
|
|
0 |
etJm |
|
|
|

3. О нелинейных автономных системах дифференциальных уравнений |
89 |
1
etJs = e st
0
0
t!=1 : : :
... ...
...
0
tks 1
(ks 1)!
.; Re s 6 < 0
t!=1
Нам важно лишь только то, что там стоят какие-то многочлены.
< ~ < 0; jetJs j 6 je stjKe(~ )t 6 e tKe(~ )t = = Ke~t; jetAj 6 jCjjetBjjC 1j 6 Qe~t:
Итак, имеем такую оценку: j~z(t)j 6 Qe~tj~z(0)j; ~ < 0.
Центральная теорема этого параграфа. Мы возвращаемся к уравнениям (1), (2).
|
|
|
|
|
~ |
|
|
|
||
Теорема: (Ляпунов). Пусть все собственные значения матрицы |
@f |
(~a) лежат в левой полуплос- |
||||||||
@~y |
||||||||||
кости. Тогда решение |
~y(t) ~a |
системы |
(1) |
(или, то же самое) |
~ |
системы |
(2) |
устойчиво |
||
|
|
|
~z(t) = 0 |
|
|
|||||
по Ляпунову и асимптотически устойчиво.
Замечание: Доказательство нужно проводить, используя уже более тщательные оценки.
Напоминание: |
|
d~z |
|
|
|
|
|
|
= A + ~g(~z); j~g(~z)j = o(j~zj): |
(2) |
|||
|
|
|
||||
|
|
dt |
||||
Доказательство: 80 < 9 > 0: |
из j~zj 6 j j следует j~g(~z)j 6 . |
|
||||
Пока решение нашей задачи существует при 0 6 6 t, и j~g(~z)j 6 j~zj, (см. 10 главы 1) |
|
|||||
|
|
|
|
|
|
|
|
~z(t) = etA~z(0) + Z0 |
e(t )A~g( ) d |
|
|||
Из доказательства предыдущей теоремы заимствуем оценку: |
|
|||||
|
|
|
t |
|
|
|
|
j~z(t)j 6 Qe~tj~z(0)j + Z0 |
Qe(t )~ j~z( )j d |
|
|||
|
e ~tj~z(t)j 6 Qj~z(0)j + Q Z |
t |
|
|||
|
e ~j~z( )j d |
|
||||
0
По неравенству Гронуолла (см. 1 главы 3),
e ~tj~z(t)j 6 Qj~z(0)jeQ t
Таким образом,
j~z(t)j 6 Qj~z(0)je(~+Q )t

90 ГЛАВА 4. АВТОНОМНЫЕ СИСТЕМЫ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
Выберем так, чтобы ~ + Q < 0. (Чтобы отрицательное число ~ мало сдвинулось вправо.) Для этого надо взять соответствующее . Теперь взяли ~, обладающее таким свойством:
Q~ < , ~ < .
Начальные значения подчиняются условию:
j~z(0)j < ~ |
(4) |
Если для 0 6 6 t решение ~z(t) определено, имеет место j~zj 6 и выполняется условие (4), то
j~z(t)j 6 Qj~z(0)je(~+Q)t |
(5) |
Сейчас мы докажем, что решение действительно определено, прич¼м для всех t, и для всех решений ~z не выходит за указанные пределы. (Иначе говоря, эти предположения выполняются).
Возьм¼м цилиндр S, такой, что
S : f0 6 t < +1; j~zj 6 g
Задача Коши с такими начальными данными имеет решение. Теперь докажем, что оно не выходит за пределы цилиндра.
|
g; 0 < T любое |
S : f0 6 t 6 T; j~zj 6 |
Èç |
(5) |
получаем, что |
~ |
. |
j~z(t)j 6 |
. |
|
|
j~z(t)j < |
|
|
Теорема доказана.
Замечание: Докажите, что если хотя бы одно собственное значение матрицы лежит в правой полуплоскости, то решение не является устойчивым по Ляпунову. Подсказка: ограничиться случаем уравнения (3).