

Маслов А.В., Гордеев А.В., Батраков Ю.Г. - Геодезия
.pdfи уточнения административно-территориальных границ и ре˝ше-
ния других задач.
Геодезической основой для создания ОМС являются пункты государственной геодезической сети всех классов, пункты системы координат 1963 г. и местных систем координат, обеспечиваю˝-
щие построение ОМС с заданной точностью.
Опорную межевую сеть создают с помощью спутниковых тех-
нологий и наземных методов (полигонометрия, триангуляция˝, трилатерация и др.).
При проектировании опорных межевых сетей с применением
спутниковой технологии руководствуются уже упомянутыми˝ Основными положениями и Инструкцией. Основой для проектиро˝- вания должны служить: сбор и анализ сведений и материалов˝ обо
всех ранее выполненных геодезических работах на объекте˝ пред-
стоящих работ по имеющимся картам наиболее крупного масш˝- таба и литературным источникам; обследование и инструмен˝-
тальный поиск геодезических знаков ранее выполненных ра˝бот; выбор наиболее целесообразного варианта спутниковых по˝строе-
íèé.
Графическую часть проекта создания ОМС составляют на кар˝-
тах масштабов 1:10 000—1:25 000.
Геодезическая основа, используемая для создания ОМС, долж˝-
на удовлетворять требованиям по беспрепятственному и по˝мехоустойчивому прохождению радиосигналов. В качестве исход˝ных
пунктов, на базе которых развивается ОМС, следует использ˝овать
все пункты ГГС, находящиеся в пределах объекта и ближайши˝е к нему, но не менее 4 пунктов с известными координатами и 5 с из˝- вестными высотами, так, чтобы обеспечить приведение пункт˝ов
ОМС в систему координат и высот пунктов ГГС.
При создании ОМС в зависимости от назначения земельно-
кадастровых работ следует применять апробированные в производственных условиях схемы, приведенные в приложении 7.
Рабочая программа полевых работ по созданию опорных меже˝- вых сетей должна включать следующие основные данные: пере˝- чень используемой аппаратуры и программного обеспечени˝я, методы спутниковых определений, продолжительность приема˝ сигналов, интервал регистрации наблюдений, порядок ведения п˝оле-
вых работ.
При проектировании вычислительной обработки результато˝в
наблюдений спутников предусматривают применение IBM — со˝в-
местных ЭВМ и использование программных пакетов, входящи˝х в
комплекты спутниковой аппаратуры.
Рекогносцировку и закрепление пунктов ОМС на местности выполняют в соответствии с указаниями Основных положени˝й и Инструкции.
При обследовании пунктов ГГС устанавливают их фактиче-
скую пригодность для выполнения наблюдений спутников. Не˝-
561
пригодные для наблюдений пункты должны быть отбракованы˝. При ограниченности числа пригодных для наблюдения пункт˝ов геодезической основы принимают меры по вовлечению забра˝ко-
ванных в процесс наблюдений (подъем антенны с определени˝ем элементов приведения).
Проверяют возможность выполнения спутниковых определе-˝
ний на пунктах ОМС с позиций выявления зон возможных препятствий, искажений и радиопомех. При необходимости корре˝к- тируют ранее запланированную расстановку пунктов.
Вычислительную обработку (постобработку) наблюдений вы-˝ полняют в таком порядке:
предварительная обработка — разрешение неоднозначнос˝тей фазовых псевдодальностей до наблюдаемых спутников, полу˝чение координат определяемых пунктов в системе координат глоб˝аль-
ной спутниковой системы и оценка точности результатов на˝блюдений;
трансформация координат в принятую систему координат; уравнивание геодезической сети и оценка точности резуль˝та-
òîâ.
19.14.СПУТНИКОВАЯ СИСТЕМА МЕЖЕВАНИЯ ЗЕМЕЛЬ
Âрезультате соглашения между Правительством Российско˝й Федерации и Правительством Швейцарии, одобренного постановлением Правительства РФ, совместными усилиями Федеральной службы земельного кадастра России (Росземкадаст˝ра), института «Госземкадастрсъемка—ВИСХАГИ» и швейцарской
фирмы GRUNDER INGENIEURE AG создана спутниковая система межевания земель (ССМЗ) Москвы и Московской области, схема которой показана на рисунке 19.24. Основное назначение˝ системы — создание координатной основы Государственно˝го зе-
мельного кадастра и кадастра объектов недвижимости.
Принцип функционирования ССМЗ состоит в следующем. Ис-
пользуемая в настоящее время в России технология определ˝ения координат пунктов с помощью спутниковых приемников сост˝оит
âприменении относительного метода, когда пользователь р˝аботает как минимум с двумя приемниками, один из которых устана˝в- ливают на определяемом объекте, а второй — на геодезичес˝ком пункте с известными координатами. Выполняют одновременн˝ые наблюдения, а затем в камеральных условиях в процессе пос˝тобработки вычисляют координаты объекта относительно исхо˝дного геодезического пункта. В ССМЗ применяется «сетевое решен˝ие». Сеть стационарных постоянно действующих референцных ст˝анций (РС) принимает измерительную информацию со спутников˝
космических навигационных систем. Далее по каналам связи˝ она передается в вычислительный центр (ВЦ), который вычисляет
562
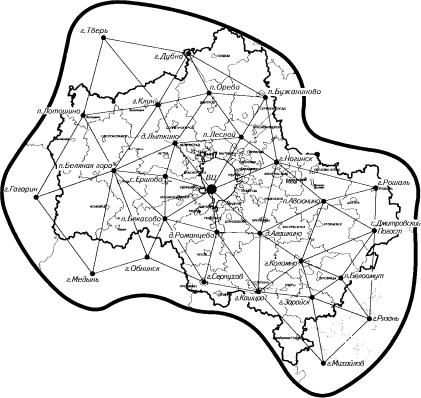
Рис. 19.24. Сеть референцных станций спутниковой системы межевания земель Москвы и Московской области
корректирующие данные и передает их пользователям. Польз˝ователь на определяемом объекте выполняет спутниковые изме˝рения с использованием переносимого (мобильного) приемника. Из˝ совместной обработки измерений этого приемника и корректи˝рующих данных пользователь вычисляет координаты объекта с п˝о- грешностью 1...2 см.
Реализуются два режима: реального времени и постобработк˝и. В режиме реального времени координаты объектов пользова˝тель получает непосредственно в спутниковом приемнике с ежесекун-
дным обновлением. В режиме постобработки координаты объе˝к-
тов вычисляют в камеральных условиях.
При «сетевом решении» пользователю для определения коор˝- динат объекта нужен только один приемник. Роль опоры здес˝ь выполняет сеть референцных станций, которые установлены˝ на территории Московской области и в ближайших к Москве райо˝- нах соседних областей. Среднее расстояние между РС — 80 к˝м, площадь обслуживаемой территории — 70 тыс. км2.
563
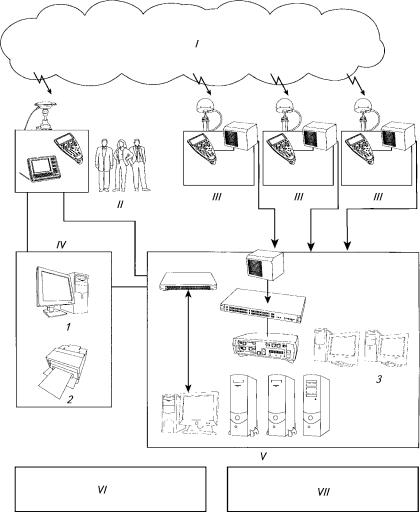
Рис. 19.25. Состав спутниковой системы межевания земель Москв˝ы и Московской области:
I — космические навигационные системы ГЛОНАСС, GPS; II — пользователи; III — референцная станция; IV — районный офис; V — вычислительный центр; VI — приборный пул; VII — учебный класс; 1 — офисный ПК; 2 — принтер; 3 — рабочие станции для постобработки
564
Основные элементы спутниковой системы межевания земель˝
(ССМЗ): космические навигационные системы, референцные станции, вычислительный центр, каналы связи, районные офи˝сы, приборный пул, учебный класс и пользователи. Схема ССМЗ по˝- казана на рисунке 19.24, учебный класс и пользователи — на ри˝-
сунке 19.25.
Вычислительный центр выполняет сбор и математическую об˝-
работку спутниковой измерительной информации, поступаю˝щей от референцных станций, обслуживает потребителей. В соста˝в ВЦ
входят аппаратно-программные средства, обеспечивающие: с˝вязь
с референцными станциями; сетевое решение задачи в режиме˝ реального времени и расчет корректирующих данных; мобильну˝ю связь с пользователями в режиме реального времени; телефо˝нную
связь с пользователями для обмена данными через Internet и пост˝-
обработку.
Информация от референцных станций в ВЦ передается по вы-
сокоскоростным радиорелейным и оптико-волоконным линия˝м связи. Связь ВЦ с пользователями, работающими в режиме реа˝ль-
ного времени, осуществляется по мобильной связи (GSM). Связь ВЦ с пользователями, работающими в режиме постобработки,
происходит по выделенному каналу с использованием Internet че- рез районные офисы ССМЗ или офисы пользователей.
Районные офисы собирают спутниковую информацию от пользователей и передают ее в ВЦ, который обрабатывает ее˝ и пе-
редает пользователям. Офисы располагают в районных земел˝ьных
комитетах или земельных кадастровых палатах, оборудован˝ных компьютерами и модемами связи.
Контрольные вопросы и задания
1. Как работает спутниковая система и каковы ее достоинств˝а? 2. Что такое псевдодальность? 3. Как измеряют расстояния от приемника д˝о спутника? 4. Перечислите состав глобальной системы и расскажите о режим˝е работы ее секторов. 5. Каков принцип формирования спутниковых сигналов? 6. Каков˝а структура спутниковых сигналов (несущие частоты L1, L2; дальномерные коды: грубый С/А и точный Р; эфемериды спутника, альманах и др.)? 7. Как формируют спутниковый сигнал? 8. Как построить генератор дальномерного кода? 9˝. Расскажите о корреляционной обработке кодового сигнала. 10. Как определ˝яют координаты из кодовых измерений? 11. Что такое дифференциальный способ˝ кодовых измерений? 12. Что такое фазовый режим измерений на несущей частоте? 13. Раскройте метод фазовых разностей. 14. Расскажите об основных и˝сточниках ошибок спутниковых наблюдений. 15. Каков состав комплекта спут˝никовой аппаратуры для геодезических сетей? 16. Какие способы и режимы спу˝тниковых наблюдений вы знаете?
565
ПРИЛОЖЕНИЯ
∙
Приложение 1
Способы компенсации углов наклона. Принцип действия компенсатора нивелира НЗК
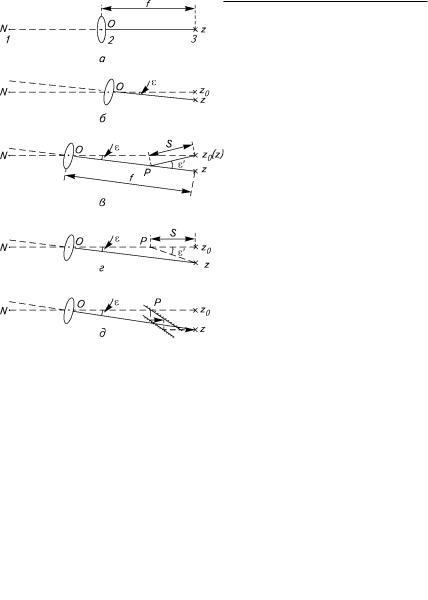
Для уяснения принципа работы компенсатора предположим, ч˝то точкаN рейки, находящейся на некотором расстоянии от нивелира, опти˝ческий центр объектива Î и перекрестие сетки z находятся на одной горизонтальной линии, совпадающей с визирной осью нивелира. В этом случае изображение т˝очкиN будет совмещено с перекрестием сетки z (ðèñ. 1, à) и отсчет по рейке будет правильным.
При наклоне трубы нивелира относительно оптического цен˝траÎ на небольшой угол ε (ðèñ. 1, á) перекрестие сетки сместится с горизонтального положени˝я на
z0z = fsin ε ≈ fε,
ãäå f — фокусное расстояние объектива зрительной трубы, и отсчет по рейке изменится — будет ошибочным.
Компенсатор дает возможность при наклонном положении трубы совместить изображение точки N с перекрестием сетки z, т. е. позволяет получить правильный отсчет по рейке, соответствующий горизонтальной визирной оси.
Для совмещения изображения точки N с перекрестием сетки z имеется три пути: 1 — с помощью рыча- га длиной S можно переместить сетку нитей из отклоненного положения z в положение z0, соответствую-
щее горизонтальному лучу, |
íà |
расстояние z0z = fε (ðèñ. 1, â); |
2 — |
можно в точке полюса Ð изменить ход визирного луча на такой угол ε′, при котором луч прошел бы че- рез перекрестие сетки z (ðèñ. 1, ã); 3 — переместить направление горизонтального луча визирования параллельно своему первоначальному направлению так, чтобы он прошел через смещенную от наклона трубы сетку Z (ðèñ. 1, ä).
Исходя из этого, все компенсаторы можно разделить на три типа: компенсаторы с подвижной сеткой, компенсаторы с поворотом визир-
Рис. 1. Способы компенсации углов наклона:
1 — рейка; 2 — объектив; 3 — сетка нитей
566
ного луча и компенсаторы с параллельным переносом визирн˝ого луча. Как видно из рисунка 1, â, ã, рычаг или оптическая система, установленные в точке Ð для компенсации углов наклона, должны для первого и второго т˝ипов удовлетворять условию
fε = Sε′,
ãäå ε′ — угол отклонения луча компенсатором,
для третьего типа (рис. 1, ä)
fε = kSε èëè f = kS,
ãäå k — коэффициент, зависящий от коэффициента компенсации, ч˝исла отражений визирного луча в системе компенсатора и расстояния ме˝жду компенсатором и сеткой нитей, k = ε′/ε, эту величину называют коэффициентом компенсации; S — расстояние от компенсатора до сетки нитей или длина хо˝да луча визирования от точки падения его на зеркало или призму компенсатора д˝о сетки нитей.
Изменить ход визирного луча, сместить его параллельно сво˝ему направлению или переместить сетку нитей из одного положения в дру˝гое можно оптическим, механическим или оптико-механическим путем. Поэтому ˝различают компенсаторы оптические, механические и оптико-механически˝е. В нивелире НЗК применен оптико-механический компенсатор, принцип дейст˝вия которого следующий.
Устройство и принцип действия компенсатора нивелира НЗК˝.Компенсатором называют устройство, с помощью которого визирная ось авто˝матически приводится в горизонтальное положение.
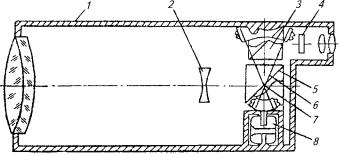
Компенсатор (рис. 2) расположен в сходящемся пучке лучей м˝ежду сеткой нитей 4 и фокусирующей линзой 2 и состоит из двух прямоугольных призм 3 è 5. Призма 3 наглухо скреплена с корпусом компенсатора 1 и служит для передачи изображения в плоскость сетки нитей 4. Нижняя призма 5 подвешена к верхней части корпуса компенсатора на двух парах скрещивающихся˝ стальных нитей6. Система подвески умножительная; отношение верхней и нижн˝ей сторон трапеции, образованной нитями подвески, равно 1/3. Для предохранения нитей от обрыва подвеска компенсатора имеет специальные ограничит˝ельные штифты.
Останавливают колебания маятника компенсатора воздушны˝м поршневым демпфером 8. Отличительная особенность компенсатора — совмещение ˝с серединой отражающей грани призмы 5 и с центром тяжести подвески в точке À мгновенного полюса вращения призмы 5, лежащего на пересечении нитей 7. Такое устройство компенсатора обеспечивает постоянство фокусировки и повышение
Рис. 2. Устройство компенсаторов нивелира НЗК
567
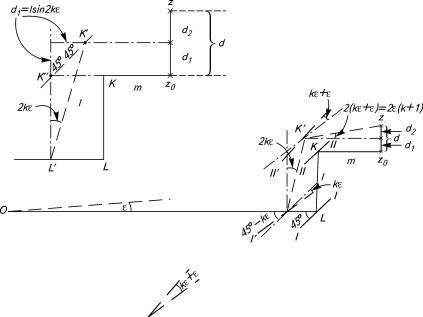
Рис. 3. К принципу действия компенсатора нивелира НЗК
точности работы компенсатора, так как в этом случае сохраняется постоянство расстояния от отражающей грани призмы до сетки нитей при ˝наклонах трубы нивелира.
Принцип действия компенсатора показан на рисунке 3. При не˝большом наклоне трубы на угол ε перекрестие сетки z0 сместится относительно горизонтальной нити на величину
d = fsin ε ≈ fε,
ãäå f — эквивалентное фокусное расстояние объектива зрительной трубы, l ≈ (OL + l + m) (l — расстояние между отражающими гранями призм I è II, l = LK; m — расстояние от отражающей грани призмы II до сетки нитей z0) и займет поло-
жение z0.
Подвешенная призма I за счет действия механического умножения, создаваемого формой подвески, развернется (сместится в положение˝I′ и наклонится) в сторону, противоположную наклону трубы на угол kε, и по свойству плоских зеркал отклонит горизонтальный луч OL íà óãîë 2kε.
Неподвижная призма II вместе с трубой наклонится на тот же угол ε и образует между преломляющими гранями подвешенной и неподвижно˝й призм угол, равный kε + ε. Из геометрической оптики известно, что две зеркальных гр˝ани призм, расположенных под углом β друг к другу, отклоняют падающий луч от своего первоначального направления на двойной угол 2β. Следовательно, падающий луч отразится от зеркальной грани неподвижной призмы под˝ углом ε2/(k + 1) к своему горизонтальному направлению. Таким образом, общее˝ смещение горизонтального луча на участке от первого зеркала компенсатора до сетки нитей составит
d = d1 + d2 = lsin 2kε + msin 2ε(k + 1)
568
или по малости угла e
d = 2e [lk + m (k + 1)].
Компенсация углов наклона будет иметь место только в том ˝случае, если соблюдается основное условие компенсации
|
fe = Se¢. |
(1) |
||||
Для нивелира НЗК это условие выражается равенством fe = d. Поэтому |
|
|||||
fe = 2e [lk + m (k + 1)] |
|
|||||
èëè |
|
|
|
|
|
|
f = 2 [lk + m (k + 1)]. |
(2) |
|||||
Из формулы (2) после элементарных преобразований имеем |
|
|||||
|
= |
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
Для нивелира НЗК при f = 250 ìì, l |
= 16 ìì, ò = 20 мм коэффициент ком- |
|||||
пенсации |
|
|
|
|
|
|
= |
|
|
|
= » |
|
|
+ |
|
|
||||
|
|
|
|
|
||
Таким образом, при наклоне нивелира на угол e отсчет по рейке остается неизменным только в том случае, когда геометрические параме˝тры нивелира связаны соотношением (2).
Если, например, на некотором расстоянии от нивелира помес˝тить рейку и взять отсчет ï1, приведя пузырек круглого уровня на середину, а затем накл˝онить нивелир на угол e, то на сетке нитей будет получен тот же самый отсчет ï1.
Приложение 2
Схема триангуляции и распечатка результатов уравнивани˝я параметрическим способом по программе «Сигма»
Исходные данные
õó
Q |
4 |
7563,81 |
11684,52 |
|
|
|
Î |
4 |
|
329°47¢28² |
2507,18 |
||
Средняя квадратическая погрешность измерения угла β = |
|
= ¢¢ |
||||
|
||||||
|
|
Таблица невязок полигона |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ð1—ΗÐ2—Ð1 |
|
3 |
+4² |
|
|
10² |
Ð2—ΗÐ3—Ð2 |
|
3 |
–6 |
10 |
||
Ð3—ΗÐ4—Ð3 |
|
3 |
+2 |
|
|
10 |
Ð4—ΗQ—Ð4 |
|
3 |
–6 |
10 |
||
ΗÐ1—Q—O |
|
3 |
+5 |
|
|
10 |
569
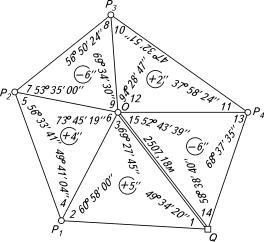
Рис. Схема центральной системы триангуляции
Оценка точности уравненных элементов и координат опреде˝ляемых пунктов
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mx |
my |
M |
ms, ì |
òα |
|
Ð1 |
0,030 |
0,026 |
0,040 |
0,032 |
3² |
|
Ð2 |
0,038 |
0,040 |
0,055 |
|||
|
|
|||||
Ð3 |
0,039 |
0,038 |
0,054 |
0,033 |
2 |
|
Ð4 |
0,025 |
0,023 |
0,034 |
|||
|
|
|||||
Q |
0,018 |
0,019 |
0,026 |
|
|
Техническая характеристика сети планового обоснования
Число измеренных элементов |
22 |
В том числе: |
|
направлений |
20 |
длин линий |
1 |
дирекционных углов |
1 |
Число избыточных измерений |
6 |
Из них выявлено и проконтролировано невязками |
|
геометрических условий: |
|
угловых |
5 |
базисных и полюсных |
1 |
Наибольшая угловая невязка полигона |
6² |
Допустимая невязка на этот полигон |
10² |
Наибольшая относительная невязка базисного или |
1:70500 |
полюсного условия |
|
570