

Маслов А.В., Гордеев А.В., Батраков Ю.Г. - Геодезия
.pdfUTО — всемирное время, непосредственно получаемое из аст-˝ рономических наблюдений суточных движений звезд, т. е. вр˝емя на мгновенном гринвичском меридиане, положение которого˝ определено мгновенными положениями полюсов Земли;
UT1 — всемирное время среднего гринвичского меридиана, оп˝-
ределяемого средними положениями полюсов Земли; его полу˝ча- ют исправлением UTО поправкой за движением мгновенного по˝- люса Земли относительно Международного условного начал˝а (МУН).
UT2 — всемирное время среднего гринвичского меридиана, ис˝- правленное поправками за сезонные вариации угловой скор˝ости вращения Земли.
Поскольку шкалы АТ и UТ автономны и между собой не согласуются, введена промежуточная шкала так называемого Всем˝ирного координированного времени UTC. В России UTC соответствует Государственному эталону частоты и времени РФ. Это˝ атомное (физическое) время, которое смещается на 1 с, когда˝ показания часов UTC отличаются от UT1 более чем на 0,7 с. Коррекцию его выполняют по мере надобности либо в полдень после˝ последней секунды полугодия 30 июня или в конце 31 декабря. Так, в результате коррекции в 1996 г. расхождение между UTC и UT1 уменьшилось до 1 мс.
Время GPS (GPST) было установлено в полночь с 5-го на 6-е января 1980 г. и составило на 19 с меньше времени TAI. В ноябре 1985 г. GPST = UTC + 4 с. В июне 1993 г. GPST опережало UTC на 9 с, в июле 1994 г. — на 10 с.
Âспутниковых сигналах GPS время передается в форме номера недели и поправки времени для каждой «GPS недели». Номера недель исчисляются от 0 до 1023. Неделя с номером 0 была начата
6 января 1980 г. Неделя с номером 1023 закончилась 21 августа 1999 г. После этого номер недели был переведен на 0 и счет нача˝л- ся сначала.
Âприемнике пользователя атомных стандартов частоты нет˝. Устанавливать их там было бы слишком дорого, поэтому сдви˝г шкалы времени кварцевых часов в спутниковом приемнике мо˝жет быть на несколько порядков больше, чем атомных часов на сп˝утнике. Однако этот сдвиг практически одинаков по отношению˝ к измерениям псевдодальностей до всех наблюдаемых в данны˝й момент спутников. Это почти постоянная систематическая пог˝решность. Ее можно исключить, если измерять псевдодальности ˝как минимум с 4 спутников. Четыре измерения позволяют вычисли˝ть
четыре параметра — три координаты, определяющие положе˝ние приемника в земном пространстве, и сдвиг шкалы времени в п˝риемнике при условии его постоянства.
Если наблюдение ИСЗ растянуто во времени, то относительный сдвиг шкал времени (школа GPS и шкала приемника) будет
551

меняться. Отсюда возникают требования к стабильности временной шкалы приемника, которая должна обеспечивать минимал˝ь- ное изменение сдвига шкал за интервал наблюдений ИСЗ.
19.9. АППАРАТУРА ПОЛЬЗОВАТЕЛЕЙ
Комплект аппаратуры. Комплектация и технические характе-
ристики аппаратуры пользователей зависят от решаемых задач. В простейшем случае — это миниатюрный приемник по размерам не больше наручных часов. Чем точнее работы, тем сложнее ап˝па-
ратура. Наиболее совершенные приемники применяют в геоде˝зи-
ческих целях. Комплект аппаратуры для геодезических целе˝й включает антенну, приемник, контроллер (управляющее устр˝ой-
ство), блок питания (для зарядки аккумуляторов и работы от˝ сети), аккумуляторы или батареи, кабели, штативы, веху для уста-
новки антенны, рулетку или специальное приспособление дл˝я измерения высоты антенны, станковый рюкзак для приемника, у˝па-
ковочные сумки, чехлы и прочее оснащение. Для обработки из˝мерений обязателен персональный компьютер с программным о˝бес-
печением. Антенну можно встроить в приемник или использов˝ать в виде выносного модуля, соединяемого с ним специальным к˝абе-
лем. Общий вид геодезического приемника Trimble 4600 показан
на рисунке 19.16.
Все приемники являются многоканальными с числом каналов˝
от 6 и более. Каждый канал следит за своим спутником. Поскол˝ь- ку при измерениях серьезной проблемой является срыв сигн˝алов в
Рис. 19.16. Геодезический приемник Trimble:
1 — приемник; 2 — штатив; 3 — источник питания
552

тени зданий и других объектов, то эти |
|
|
трудности легче преодолеть, если вы- |
|
|
полнять измерения многоканальными |
|
|
приемниками: чем |
больше каналов, |
|
тем легче найти необходимое число ви- |
|
|
димых спутников и избежать срывов. |
|
|
Приемники можно разделить: |
|
|
на односистемные, принимающие |
|
|
сигналы только GPS; |
|
|
двухсистемные, принимающие сиг- |
|
|
налы как ГЛОНАСС, так и GPS. |
|
|
По видам принимаемых и обрабаты- |
|
|
ваемых сигналов приемники делят: |
|
|
на кодовые одночастотные, работа- |
|
|
þùèå ïî Ñ/À-êîäó; |
|
|
кодовые двухчастотные, ориентиро- |
|
|
ванные прежде всего на Р-код; |
|
|
кодово-фазовые |
одночастнотные, |
|
применяющие дальномерный С/А-код |
Рис. 19.17. Кодовый прием- |
|
и фазовые измерения только на часто- |
íèê Meridian |
|
òå L1;
кодово-фазовые двухчастотные, использующие дальномерные коды и фазовые измерения на част˝о-
òàõ L1 è L2.
Максимальную точность обеспечивают двухчастотные прием˝- ники (погрешность измерений составляет сантиметры и даже˝
миллиметры). Вместе с тем и одночастотные приемники благо˝да-
ря применению относительного метода измерений и соверше˝нной методики обработки позволяют получить высокую точность˝.
Кодовые приемники (рис. 19.17) легки, компактны, умещаются на ладони. В одном корпусе совмещены все блоки (антенна, сам приемник, питание). Кроме определения трехмерного положе˝ния, как правило, вычисляют скорость и направление движения. Выдают координаты в разных форматах (широта, долгота, высота, плоские координаты в разных проекциях и др.). После снятия ˝ре-
жима SA (селективного доступа) кодовые приемники стали основ-
ными приборами для определения места в различных географ˝и-
ческих, геологических и других работах.
Кодово-фазовые приемники малогабаритны, обычно оснащены
отдельной антенной, имеют мощные накопители данных. В нек˝о-
торых конструкциях внутренняя память до 100 Мб и более, а чи˝с- ло каналов достигает 40.
Все они снабжены портами для интеграции с другой аппарату˝- рой, питаются в основном от аккумуляторов. Нередко клавиа˝тура
с дисплеем установлена на вспомогательном устройстве — контроллере, которое пользователь держит в руке, при измерен˝иях вводит необходимые команды (имя точки, высота антенны и др˝.).
553
Кодово-фазовые приемники выполняют следующие основные
функции:
генерирование местных эталонных колебаний, несущих част˝от и дальномерных кодов;
поиск, захват, усиление и разделение сигналов от разных сп˝ут-
ников; регистрацию сигналов;
фильтрацию сигналов для ослабления помех; детектирование сигналов для выделения меток времени, код˝о-
вых посылок, навигационного сообщения и несущих колебани˝й;
слежение за частотой, фазой, кодовыми сигналами, измерени˝е времени и разности фаз при кодовых и фазовых измерениях.
При включении питания в приемнике устанавливают стартов˝ое
меню, позволяющее пользователю выбрать нужный режим изме˝-
рений. При поступлении сигнала от спутника и наличии альм˝анаха, хранящегося в памяти приемника, производится идентифи˝ка-
ция спутника, и приемник начинает захват сигнала. Захват с˝игнала — это вхождение в синхронизм по фазе псевдослучайног˝о кода,
т. е. совпадение местной ПСП с поступающей от спутника. В да˝льнейшем приемник поддерживает режим отслеживания захвач˝ен-
ных сигналов и позволяет периодически брать отсчеты, фикс˝ирующие вычисленные псевдодальности и точное время.
Приемник обладает системой автоматизированного управления, которая позволяет обрабатывать поток получаемой информ˝ации,
производить вычислительные операции, показывать на дисп˝лее
интересующие оператора данные, выполнять самодиагности˝ку работы приемника и др. Все это возможно благодаря соответст˝вующему программному обеспечению, которое имеет исключительно
важное значение в любом спутниковом приемнике. При этом н˝а-
блюдается тенденция к уменьшению массы и габаритов прием˝ни-
ка, конструктивному объединению отдельных частей компле˝кта аппаратуры и максимальному упрощению органов управлени˝я. Такие приемники образуют новое поколение, получившее наз˝вание приемники класса «все в одном».
В мире производством спутниковых приемников заняты боле˝е 400 фирм. В России получили распространение приемники фирм Ashteck, Trimble, Magellan (США), Leica (Швейцария), Z-Max,
ProMark (Франция), Geotronics АВ (Швеция), Topcon (Япония)
è äð.
При участии фирмы Ashteck в России разработан 12-канальный
одночастотный приемник «Землемер».
Появились совмещенные GPS/ГЛОНАСС приемники: Trimble 4000 SGL, Ashteck GG-24, JGG 20 и др.
В результате объединения компании JPS (Javad Positioning System) с японской корпорацией Topсon создается новая компания TPS (Topсоn Positioning System), которая начинает выпускать при-
емники нового поколения с усовершенствованной технолог˝ией.
554
Начали создавать интегрированные системы, одной из состав-
ных частей которых является спутниковый приемник. Так, шв˝едская фирма Spectra Precision выпустила модульную геодезическую систему Geodimeter Integrated Surveying System, объединяющую тахеометр, спутниковый приемник и полевой пен-компьютер
(компьютер, в котором клавиатуру заменяет «световое перо˝», позволяющее рисовать и чертить от руки прямо на экране).
19.10. СПОСОБЫ И РЕЖИМЫ НАБЛЮДЕНИЙ
Способы наблюдений разделяют на абсолютные è относительные (см. раздел 19.3). При абсолютных способах определяют координаты пунктов, а при относительных — приращения (разнос˝ти)
координат или вектор базы между двумя пунктами.
Абсолютные способы делят на автономные (когда измерения
производят одним приемником) и дифференциальные [с испол˝ь- зованием базовой станции, передающей на «рабочий» (мобил˝ь-
ный) приемник дифференциальные поправки]. При абсолютных˝ способах выполняют кодовые измерения, а при относительны˝х —
фазовые (кодовые в этом случае выполняют вспомогательные˝
функции для нахождения приближенных значений координат˝ и разрешения неоднозначности).
Относительные способы — наиболее точные, и применяют их для геодезических целей.
Существует несколько геодезических режимов, все их делят˝ на две группы: статические и кинематические. В обоих режимах˝ один
из приемников находится на исходном пункте, а другой — на определяемом, но в статике оба приемника неподвижны, а в кинемати-
ке «определяющийся» (мобильный) приемник перемещается (н˝е-
прерывно или с остановками).
Статика. Статический режим — наиболее точный и требующий больших (не менее 1,5 ч) затрат времени на наблюдения. Его ис˝- пользуют для создания точных геодезических сетей. Значит˝ельная продолжительность наблюдений необходима для уверенного˝ разрешения неоднозначности и получения результатов измере˝ний с сантиметровой и даже миллиметровой точностью. При этом до˝-
полнительное время (не менее получаса на каждый пункт) нео˝бхо-
димо на обработку результатов измерений в камеральных ус˝лови-
ÿõ — постобработку.
Б ы с т р а я с т а т и к а — статический режим, при котором время наблюдений на пункте сокращается до 10...15 мин. Платой
за экономию времени является риск столкнуться с трудност˝ями разрешения неоднозначности на этапе постобработки.
Кинематика. Классический вариант кинематического режима — режим stop and go («стой и иди»), при котором движущийся приемник — ровер (rover — скиталец) перемещают с пункта на
555
пункт, делая на этих пунктах остановки. Однако, чтобы реали˝зовать такой режим, работу начинают со статического вариант˝а, выполнив — инициализацию — наблюдения длительностью 1...1,5 ч для определения вектора базы и разрешения неоднозначнос˝ти. При этом референцный (неподвижный) приемник устанавливают
на исходном пункте, а роверный — на первом из определяемых пунктов (эти пункты и образуют базу). После выполнения ини˝циализации оператор роверного приемника переключает его в˝режим движения и начинает движение к следующему пункту. При этом двигаться нужно так, чтобы на антенну поступали сигн˝алы не менее чем от четырех одних и тех же спутников. В случае с˝рыва сигнала возвращаются на предыдущий пункт. Если срыва не происходит, то, прибыв на очередной пункт, устанавливают анте˝нну над ним и переключают приемник в статический режим, котор˝ый продолжается меньше 1 мин; за это время измеряют высоту ан˝тенны и вводят ее в приемник (а также вводят название пункта). Н˝а этом работа на пункте заканчивается, оператор переключае˝т приемник в роверный режим и движется к следующему пункту. Короткое время наблюдений на пункте обусловлено тем, что не˝ требуется разрешать неоднозначность на каждом пункте, так ка˝к, определив число N0 при инициализации на базе, приемник при перемещении непрерывно отслеживает его изменения счетом фазовых циклов, если только не потерян сигнал от спутника из числа четырех необходимых.
К и н е м а т и к а «в п о л е т е» (on the fly — OTF). Это вариант кинематического режима, не требующий инициализации. Е˝го используют в том случае, когда есть уверенность, что прием˝ сигналов достаточного числа спутников не прервется в течени˝е 20...30 мин. За это время при непрерывной работе приемника он
накопит достаточно информации для того, чтобы программно˝е обеспечение при постобработке смогло разрешить неодноз˝нач- ность.
Общий недостаток всех перечисленных способов наблюдений — необходимость постобработки в камеральных услови˝ях.
К и н е м а т и к а в р е а л ь н о м в р е м е н и (Real Time Kinematics —RTK). Этот метод является дальнейшим развитием кинематического режима. Сущность его состоит в том, что из˝мерения и обработка производятся одновременно. Для этой цел˝и между референцным (опорным) и роверным (мобильным) приемниками организуется цифровой радиоканал (в оба приемника вводятся соответствующие радиомодемы), по которому ровер˝-
ный приемник получает от референцного всю необходимую ин˝- формацию, чтобы тут же ее обработать совместно с результа˝тами своих фазовых измерений и определить свои координаты с са˝н- тиметровой точностью. При этом не требуется никакой посто˝б- работки.
556
19.11. ПЛАНИРОВАНИЕ НАБЛЮДЕНИЙ
Цель планирования наблюдений — определение оптимально˝го
интервала времени для наблюдений на данном объекте — оп˝тимального в том смысле, что в этом интервале в зоне радиовид˝имости приемника будет находиться достаточное число спутни˝ков и
их конфигурация обеспечит PDOP, близкий к единице. Особенность такого планирования заключается в том, что он˝о
включает не только сбор традиционной информации из разны˝х
источников (картографические материалы, данные рекогнос˝ци-
ровки о характере местности, препятствиях и т. п.), но и полу˝че- ние альманаха созвездия спутников (число спутников, знач˝ения
PDOP для данного интервала времени и др.) при помощи программного обеспечения спутникового приемника. В качеств˝е при-
мера в таблице 19.3 приведен фрагмент альманаха спутников.
19.3. Фрагмент альманаха спутников на 29.07.2003
10m40h |
6 |
1,26 |
2,69 |
3 16 17 20 22 24 |
11 00 |
6 |
1,26 |
2,26 |
3 16 17 20 22 24 |
12 20 |
5 |
1,46 |
2,56 |
3 16 17 20 22 |
11 40 |
4 |
2,20 |
5,49 |
3 16 17 22 |
12 00 |
6 |
1,28 |
2,16 |
3 16 17 22 23 26 |
12 20 |
6 |
1,37 |
2,13 |
3 16 17 22 23 26 |
12 40 |
7 |
1,20 |
2,15 |
3 16 17 22 23 26 28 |
13 00 |
6 |
1,46 |
2,86 |
3 17 22 23 26 28 |
13 20 |
7 |
1,33 |
2,43 |
3 17 21 22 23 26 28 |
13 40 |
6 |
1,42 |
2,87 |
3 17 21 23 26 28 |
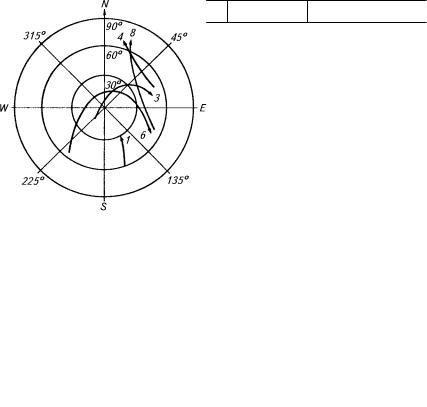
Кроме того, может быть составлена диаграмма видимых положений спутников на небесной
сфере в некоторый задаваемый
интервал времени (рис. 19.18).
Рис. 19.18. Пример диаграммы видимых положений и траекторий движения спутников на небесной сфере (цифрами обозначены номера спутников)
557
19.12. УСТРОЙСТВО И ОПЕРАЦИИ С ПРИЕМНИКОМ TRIMBLE 4700
Приемник Trimble 4700 (США), комплект которого специально разработан для выполнения геодезических работ, показан н˝а рисунке 19.19.
Управляют им одной кнопкой, функционирование контроли-
руют по пяти светодиодам. Приемник отслеживает спутники п˝о частотам L1 è L2. Для вычисления координат приемник записыва-
ет данные во внутреннюю память и предоставляет как измере˝ния, так и результаты вычислений через порты RS-232.
С помощью приемника 4700 можно выполнять съемку с постобработкой в режимах статики, быстрой статики и кинематик˝и.
Данные регистрируют во внутреннюю память, а затем перекач˝ивают в компьютер. Для получения конечных результатов — коо˝рди-
нат пунктов собранные данные обрабатывают с помощью программного обеспечения. В режиме реального времени RTK при-
емник 4700 обеспечивает точность определения координат пун˝к-
тов на уровне 1 см.
Комплект приемника включает: ручной контроллер TSCI с программой; микроцентрированную антенну и радиоустройс˝тво.
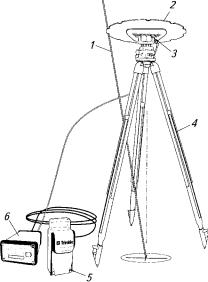
Рис. 19.19. Комплект аппаратуры Trimble 4700 на базовой станции для съе˝мки в режимах «статика» и «быстрая статика»:
1 — измерительный стержень; 2 — защитная пластина; 3 — микроцентрированная антенна; 4 — татив; 5 — аккумулятор; 6 — приемник 4700
558

Рис. 19.20. Панель управления приемника 4700:
1 — светодиод |
отслеживания |
|
спутников (красный); |
2 — ñâå- |
|
тодиод регистрации |
(память) |
|
(желтый); 3 — светодиод приема передачи пакета данных; 4 — светодиод контроля питания; 5 — кнопка включения (выклю- чения), питания
Панель управления приемника 4700 показана на рисунке 19.20. Задняя панель приемника с портами (рис. 19.21), включает:
порт 1 для подсоединения контроллера TSCI;
порт 2 для подсоединения внешнего источника питания или
компьютера;
порт 3 для подсоединения внешнего радиомодема для RTK из-
мерений или для подключения вторичного источника питани˝я.
Управление потоком данных выполняет только порт 3. Приемник комплектуется микроцентрированной антенной для отс˝леживания GPS спутников. Приемник питается от источника постоян˝-
ного тока напряжением 11...24 В, подаваемого на порты 2 и 3.
Наиболее часто с приемником используют внешние источник˝и питания: универсальное устройство OSM IV, внешний аккумуля-
тор 6 А/ч (подключают к базовой станции) и камкодерные акку˝- муляторы (подключают к роверу).
После завершения наблюдений полевые данные загружают в компьютер, на который установлена последняя версия прогр˝амм-
ного обеспечения GPSurvey.
Высоту антенны, являющуюся необходимой составной частью˝ результатов GPS наблюдений, измеряют с помощью измеритель-
ного стержня от верхней кромки антенны до центра геодезич˝еского пункта (см. рис. 19.19). Ее вводят в компьютерную обработку для приведения координат к центру пункта.
Для выполнения кинематической съемки в реальном времени˝ или с постобработкой на базе приемника 4700 необходим контроллер TSCI с программным обеспечением Survey Controller.
Рис. 19.21. Задняя панель приемника с портами 1...3
559
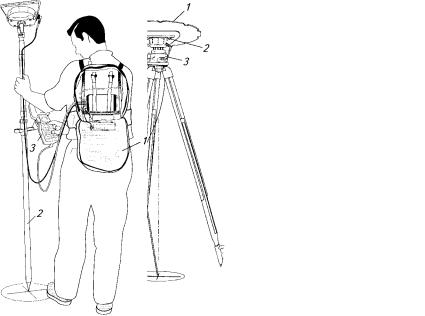
Рис. 19.22. Съемка в режиме |
Рис. 19.23. Комплект аппаратуры на базовой |
||
«кинематика» приемником |
станции для съемки в режиме RTK: |
||
4700 в комплекте с рюкзаком |
1 — защитная |
пластина; 2 — микроцентрирован- |
|
(1), вехой (2) и контролле- |
|||
ная антенна; 3 — трегер; 4 — приемник 4700; 5 — |
|||
ðîì (3) |
|||
аккумулятор; 6 — кабель; 7 — радиомодем; 8 — ðà- |
|||
|
|||
|
диоантенна; |
9 — штатив; 10 — измерительный |
|
|
|
стержень |
|
При выполнении съемки в режиме «кинематика» с постобработкой используют комплект приемника 4700 с рюкзаком, вехой ˝и контроллером (рис. 19.22). Для выполнения RTK съемки каждый базовый приемник и ровер оснащают радиомодемом и антенно˝й для поддержания связи между базой и ровером. Комплект обо˝рудования для базовой станции в режиме RTK съемки показан на рисунке 19.23.
Методика спутниковых наблюдений и обработки базовой ли-
нии приведена в приложении 6.
19.13.СОЗДАНИЕ ОПОРНЫХ МЕЖЕВЫХ СЕТЕЙ
ÑПРИМЕНЕНИЕМ СПУТНИКОВОЙ АППАРАТУРЫ
Как уже отмечалось в разделе 10.6, опорные межевые сети создают для межевания земель, ведения Государственного зем˝ельного кадастра и мониторинга земель, землеустройства, устано˝вления
560