

44
4. УРАВНЕНИЯ ЭЛЕКТРОМАГНИТНОГО ПЕРЕХОДНОГО ПРОЦЕССА В МАШИНЕ ПЕРЕМЕННОГО ТОКА
4.1. Основные допущения
Вспомните, какова конструкция синхронной и асинхронной электрических машин. Что означают термины «ротор», «статор», «якорь»?
При рассмотрении электромагнитных переходных процессов электрические машины переменного тока представляют соответствующими математическими моделями. Эти модели могут описывать реальные процессы, происходящие в электрических машинах, с той или иной степенью точности, отличаясь принятыми допущениями.
В дальнейшем при рассмотрении электромагнитных переходных процессов будут использоваться следующие допущениями:
1)магнитная проницаемость всех элементов магнитной системы машины постоянна, независящая от величин токов, протекающих по ее обмоткам;
2)индукция магнитных полей самоиндукции трехфазных обмоток и взаимоиндукция обмоток статора и ротора вдоль окружности зазора машины распределены по синусоидальному закону (т. е. отсутствуют все гармоники индукции этих полей, кроме первой);
3)магнитопровод и обмотки машины симметричны;
4)все дополнительные по отношению к обмотке возбуждения контуры ротора синхронной машины заменяются двумя эквивалентными демпферными контурами - продольным и поперечным, магнитные оси которых совпадают соответственно с продольной и поперечной осями ротора.
4.2.Потокосцепления, собственные индуктивности и взаимные индуктивности обмоток синхронных машин
Вспомните, чем отличаются конструкция явнополюсных и неявнополюсных синхронных машин.
Для анализа переходных процессов в электрических машинах используют уравнения напряжений, составленные для их контуров. В эти уравнения входят потокосцепления контуров машин, связанные с величинами протекающих в этих контурах токов и их индуктивностями. Для синхронных машин, обладающих наиболее сложной конструкцией, эта связь в матричной форме может быть задана как
ΨA |
|
LA |
|
|
ΨB |
|
|
|
|
M BA |
|
|
ΨC |
|
MCA |
|
Ψf |
|
= |
|
|
M fA |
|
Ψ1d |
|
M1dA |
|
|
|
|
|
|
Ψ1q |
M1qA |
|
|
|
|
|
M AB |
M AC |
M Af |
M A1d |
M A1q |
iA |
|
|
|||||||||
L |
M |
BC |
M |
Bf |
M |
B1d |
M |
|
|
i |
|
|
|
|||
|
B |
|
|
|
|
|
|
B1q |
|
B |
|
|
||||
MCB |
LC |
MCf |
MC1d |
|
|
|
|
|
, |
(4.1) |
||||||
MC1q |
× iC |
|||||||||||||||
M fB |
M fC |
Lf |
M f 1d |
0 |
if |
|
|
|||||||||
M |
|
M |
|
|
M |
|
|
L |
0 |
|
i |
|
|
|
||
|
1dB |
|
1dC |
|
1df |
|
1d |
L1q |
|
1d |
|
|
||||
M1qB |
M1qC |
0 |
0 |
|
i1q |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
45
где Ψ - потокосцепление контура;
L- индуктивность контура;
M- взаимная индуктивность контуров;
i - ток, протекающий по контуру.
В уравнении (4.1) принадлежность величины к тому или иному контуру отмечена индексами:
для фазных обмоток якоря - A, B, C; для обмотки возбуждения - f;
для продольного и поперечного эквивалентных демпферных контуров - 1d и 1q.
Поскольку магнитная проницаемость магнитопровода машины принята постоянной, то, в соответствии с принципом взаимности, взаимные индуктив-
ности с одинаковыми, |
но переставленными местами индексами равны: |
M AB = M BA , M A1d = M1dA |
и т. д. Между обмотками, у которых магнитные оси |
сдвинуты на 90 эл. градусов, магнитная связь отсутствует, а соответствующие взаимные индуктивности равны нулю.
Некоторые индуктивности и взаимные индуктивности, входящие в уравнение (4.1), не зависят от положения ротора машины в пространстве, другие - зависят (если при вращении ротора изменяется конфигурация ферромагнитных масс по отношению к соответствующему контуру машины).
В явнополюсных машинах постоянными остаются индуктивности всех контуров ротора ( Lf , L1d и L1q ) и взаимная индуктивность обмотки возбужде-
ния и продольного демпферного контура M f 1d = M1df .
В неявнополюсных машинах, кроме того, также постоянны индуктивности фазных обмоток ( LA , LB , LC ) и взаимные индуктивности между этими об-
мотками ( M AB = M BA , M AC = MCA , M BC = MCB ).
Все остальные индуктивности и взаимные индуктивности зависят от положения ротора относительно обмоток статора и, следовательно, являются функциями времени.
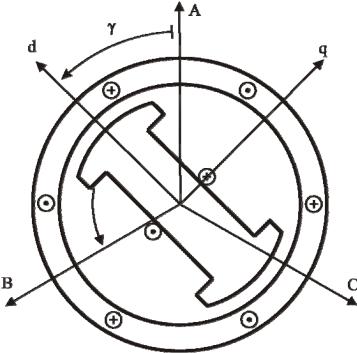
Принципиальная схема явнополюсной синхронной машины представлена на рис. 4.1. Обмотка каждой фазы якоря характеризуется магнитной осью, которая означает направление магнитного потока в центре расточки машины, обусловленного током данной фазы, если его направление совпадает с принятым положительным. При сделанных выше допущениях магнитные оси фаз А, В и С сдвинуты друг относительно друга на 120 эл. град., а их порядок чередования зависит от направления вращения ротора. Оси d и q вращаются вместе с ротором. Положительное направление продольной оси d определяется направлением магнитного потока, созданного током возбуждения, при направлении этого тока, принятом в качестве положительного. За положительное направление поперечной оси q примем направление, отстающее от положительного направления продольной оси на 90 эл. градусов.
46
Рис. 4.1. Принципиальная схема явнополюсной синхронной машины
Положение ротора синхронной машины в произвольный момент времени можно задать с помощью угла γ = f (t ) между магнитной осью фазы А и поло-
жительным направлением продольной оси ротора.
Синусоидальность наводимых в статоре ЭДС холостого хода уже указывает на закон изменения взаимных индуктивностей между обмоткой возбуждения и каждой фазной обмоткой статора. Очевидно, что он выражается синусоидальной функцией с периодом 2π (для двухполюсной машины это соответствует одному обороту ротора), максимум которой Mm наступает при совпадении
магнитных осей этих обмоток. Так, например, для фазы А
M Af = M fA = Mm cos γ. |
(4.2) |
Изменение индуктивностей фазных обмоток и взаимных индуктивностей между этими обмотками обусловлены вращением явнополюсного ротора, поскольку при этом непрерывно меняется сопротивление магнитным потокам, которые определяют величину индуктивности. Изменение магнитных потоков происходит гармонически с периодом π. Так, например, индуктивность фазы А
LA =l0 +l2 cos2γ +l4 cos4γ +... , |
(4.3) |
где l0 ,l2 ,l4 ,... - коэффициенты.
Обычно в практических расчетах коэффициенты высших порядков не учитывают, ограничиваясь первыми двумя.
Аналогичный вид имеют зависимости от угла γ и для других индуктивностей и взаимных индуктивностей.
47
4.3. Исходные дифференциальные уравнения переходного процесса в синхронной машине
Поскольку при переходных процессах в электрической машине происходит изменение частоты ее вращения, то при анализе переходного процесса необходимо совместно исследовать процессы в электрических цепях машины и механическое движение ее ротора, т. е. совместно решать систему дифференциальных уравнений напряжений в контурах машины и уравнение моментов сил, действующих на ее ротор.
Будем считать, что машина с демпферными контурами имеет шесть контуров: три контура фаз, контур обмотки возбуждения, продольный демпферный контур и поперечный демпферный контур. Поэтому для исследования переходных процессов в синхронной машине необходимо составить шесть уравнений напряжений в ее контурах и уравнение моментов.
При этом положительными направлениями будем считать:
–для токов в фазных обмотках - направления от нейтрали обмоток к выводам машины;
–для токов обмотки возбуждения и продольного демпферного контура - направление, при котором созданные ими магнитные потоки направлены по положительному направлению продольной оси;
–для тока поперечного демпферного контура - направление, при котором созданный им магнитный поток направлен по положительному направлению поперечной оси;
–для ЭДС в фазах якоря - положительные направления токов в фазах;
–для напряжения, приложенного к обмотке возбуждения - направление, совпадающее с положительным направлением тока возбуждения.
Сучетом выбранных положительных направлений токов, ЭДС и напряжений дифференциальные уравнения напряжений в контурах синхронной машины имеют вид:
|
|
|
|
|
|
|
|
dΨ |
|
A |
|
|
|
|
|
|
|
||
uA = − |
|
|
|
|
|
− RiA; |
|
||||||||||||
dt |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
dΨB |
|
|
|
|
|
|
|||||
u |
|
|
= − |
|
− Ri |
; |
|
||||||||||||
|
|
|
|
|
|
|
|||||||||||||
|
B |
|
|
|
|
|
dt |
|
|
|
|
|
B |
|
|
||||
|
|
|
|
|
|
|
dΨC |
|
|
|
|
|
|
||||||
u |
|
|
= − |
− Ri |
; |
|
|||||||||||||
|
|
|
|
|
|
|
|||||||||||||
C |
|
|
|
|
|
dt |
|
|
|
|
|
C |
|
(4.4) |
|||||
|
|
|
|
|
|
dΨf |
|
|
|
|
|
|
|
|
|||||
u |
|
= |
|
− R |
i |
|
; |
|
|
||||||||||
|
|
|
|
|
|
|
|||||||||||||
|
|
f |
|
|
|
|
|
dt |
|
|
|
f |
|
f |
|
|
|
||
|
|
|
|
dΨ1d |
|
|
|
|
|
|
|
|
|
|
|
||||
0 = |
|
|
− R1d i1d ; |
|
|
||||||||||||||
|
|
|
|||||||||||||||||
|
|
dt |
|
|
|||||||||||||||
0 |
|
= |
dΨ1q |
|
− R i |
|
, |
|
|
||||||||||
|
|
|
|
|
|||||||||||||||
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
dt |
|
|
|
1q |
1q |
|
|
|
|||||