

4.3.2 Шумовая автоматическая регулировка усиления
Следует подчеркнуть, что все системы АРУ начинают работать, как правило, с определенной задержкой, т.е. по достижении сигналом на входе и выходе приемника некоторого начального уровня Uвх н и Uвых н (рис.4.8). Благодаря задержке обеспечивается максимальное усиление слабых сигналов. При Uвх < Uвх н цепь АРУ отключена, и приемник имеет постоянное максимальное усиление (начальный линейный участок АХ на рис.4.8).
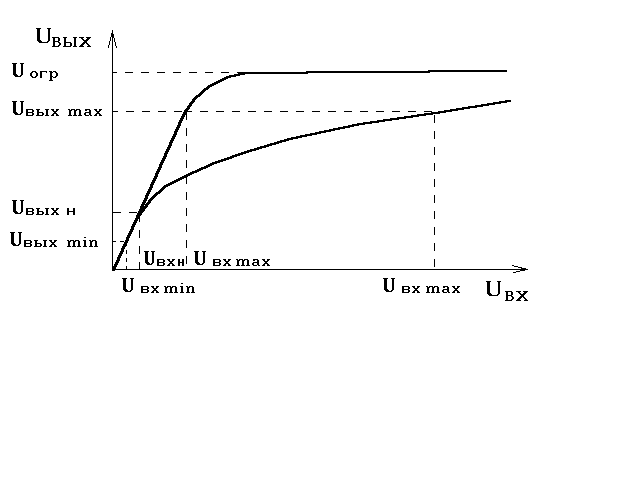
Рис.4.8. Амплитудная характеристика приемника:
1 − без АРУ; 2 − с АРУ
При Uвх > Uвх н с ростом входного сигнала уменьшается коэффициент усиления приемника, вследствие чего АХ последнего (при постоянном дифференциальном коэффициенте усиления) выходит на уровень Uвых mах при значениях входных напряжений, значительно больших, чем в отсутствии АРУ.
Схема шумовой автоматической регулировки усиления (ШАРУ) предназначена для поддержания неизменным среднего уровня шумового напряжения на выходе приемного устройства при значительном изменении интенсивности АШП на его входе. Нормирующее действие ШАРУ достигается подачей отрицательного смещения на каскады УПЧ, при этом рабочая точка смещается в область характеристики с малой крутизной.
Структурная схема ШАРУ непрерывного действия представлена на рис.4.9. Она состоит из регулируемого усилителя и цепи обратной связи (цепи ШАРУ).
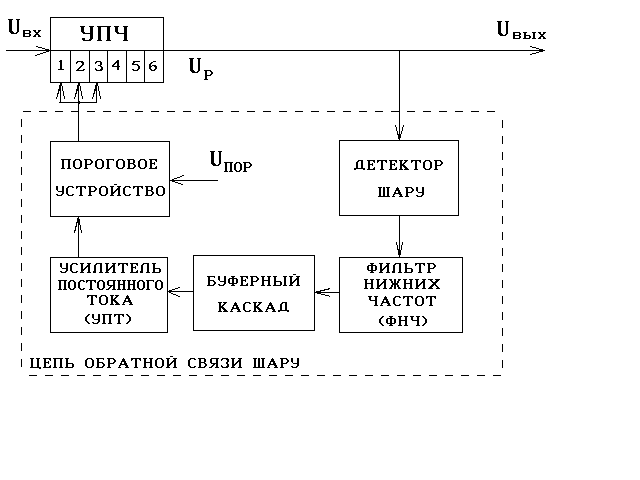
Рис.4.9. Структурная схема ШАРУ непрерывного действия
В качестве регулируемых каскадов целесообразно выбирать первые каскады УПЧ, через которые проходят сигналы сравнительно небольшого уровня. Поскольку в процессе регулирования рабочая точка смещается на нелинейный участок характеристики регулируемого каскада, то по мере увеличения числа регулируемых каскадов в последнем из них могут возникнуть большие нелинейные искажения сигнала.
Для предотвращения этого ограничивают число регулируемых каскадов, а требуемый диапазон регулирования обеспечивают соответствующим увеличением диапазона регулирования на один каскад, увеличивая крутизну регулировочной характеристики.
Цепь обратной связи ШАРУ включает в себя: детектор ШАРУ, фильтр нижних частот (ФНЧ), буферный каскад, усилитель постоянного тока (УПТ) и пороговое устройство.
Детектор ШАРУ детектирует шумовое напряжение. Фильтр нижних частот выделяет постоянную составляющую продетектированного шумового напряжения. В качестве ФНЧ часто применяется однозвенный RC-фильтр. Постоянная времени фильтра tФНЧ = RC, определяющая быстродействие схемы ШАРУ, выбирается из условия выделения среднего значения продетектированного напряжения − ФНЧ (50-100)кор, где кор − время корреляции шумового напряжения на выходе детектора. Можно считать, что кор 1/ПУПЧ. Обычно ШАРУ = (10-20)∙τи.
Буферный каскад обеспечивает развязку ФНЧ и УПТ. Его роль, как правило, выполняет катодный, либо эмиттерный повторитель.
Чтобы не снижать усиление сигналов при отсутствии помех, схема ШАРУ должна вырабатывать регулирующее напряжение лишь при воздействии на ее вход шумовых сигналов, превышающих номинальный уровень. Это обеспечивается с помощью порогового устройства (устройства отсечки).
Схема ШАРУ непрерывного действия применяется в условиях воздействия на РЛС АШП с резко выраженной нестационарностью.
В тех случаях, когда интенсивность помехи в пределах периода повторения Тп изменяется несущественно (не резко выраженная нестационарность) применяется ключевая ШАРУ (рис.4.10). Особенность ее состоит в том, что в цепь обратной связи включается ключ, управляемый генератором импульсов строба. Стробирование осуществляется с целью исключения влияния на регулирующее напряжение ШАРУ мощных отражений от местных предметов, целей, метеообразований и т.п. Ключ открывается в конце дистанции на время, примерно равное (0,2-0,3)Тп.
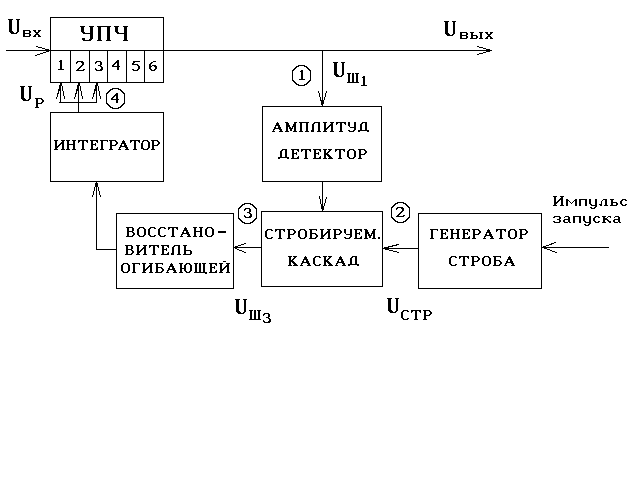
Рис.4.10. Структурная схема ключевой ШАРУ
Средний уровень шумового напряжения на выходе приемного устройства определяет величину напряжения срабатывания порогового устройства Uо при заданной вероятности ложной тревоги F. Для того чтобы при постоянном пороговом напряжении Uо величина F соответствовала заданному значению, необходимо стабилизировать среднеквадратическое значение шума на выходе Uш. Эта задача решается с помощью схемы ШАРУ.
ШАРУ является разновидностью инерционной АРУ непрерывного действия. Особенность ее состоит в том, что входным возмущением цепи ШАРУ является не сигнал, а шум. Поэтому в цепь ШАРУ включается селектор шума, обеспечивающий подачу на ее вход выборки шума.