

6.4 Системы передачи и формирования масштабных отметок азимута рлс ртв
6.4.1 Принципы построения систем передачи азимута рлс ртв
Системы передачи азимута (СПА) предназначены для формирования и передачи информации об азимутальном положении антенны на системы РЛС (систему отображения, автоматической обработки информации и др.), на сопрягаемые с РЛС системы, а также для ориентирования антенной системы РЛС.
Для преобразования угла поворота вала привода антенны в напряжение синхронно-следящей передачи (ССП) используются датчики на сельсинных парах, которые являются простейшим вариантом следящей системы.
Простейшая следящая система состоит из сельсин-датчика (СД) и сельсин-приемника (СП), на которые подается опорное напряжение (рис.6.30).
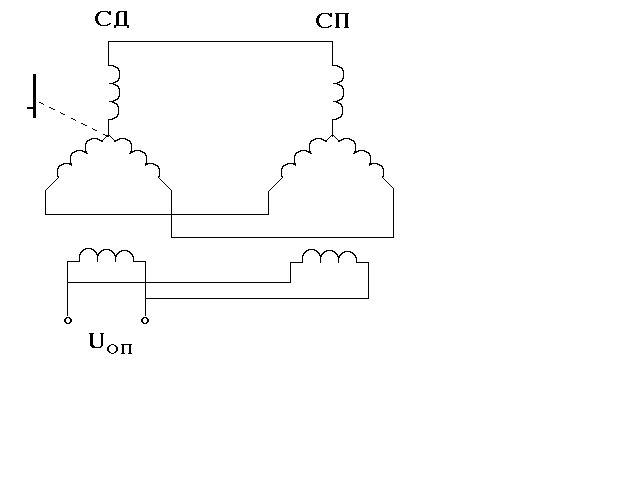
Рис.6.30. Отслеживание угла поворота с помощью сельсинной пары
Если при этом непрерывно вращать ротор СД, то непрерывно вращается и ротор СП, отслеживая задаваемый азимут.
В некоторых случаях требуется ввести некоторое смещение (поправку) в отслеживаемый азимут, тогда применяют дифференциальные сельсины (ДС) (рис.6.31). ДС отличаются от обычных сельсинов наличием ротора с такой же как у статора 3-х фазной обмоткой. Следовательно, появляется дополнительная возможность вводить смещение по азимуту между задающим СД и оконечным СП.
В РЛС РТВ чаще всего используются одноканальные и двухканальные системы передачи азимута на сельсинах.
Достоинством одноканальных СПА (рис.6.32) является отсутствие ложного нуля, однако точность их невысока. Поэтому они находят применение лишь в РЛС метрового диапазона (П-12, П-18), где другие составляющие ошибок измерения азимута имеют тот же порядок.
В РЛС дециметрового и сантиметрового диапазонов используются только двухканальные СПА (рис.6.33). Точность передачи азимута в таких системах примерно в np раз выше, чем в одноканальных, где np – коэффициент редукции точного канала.

Рис.6.31. Дифференциальный сельсин
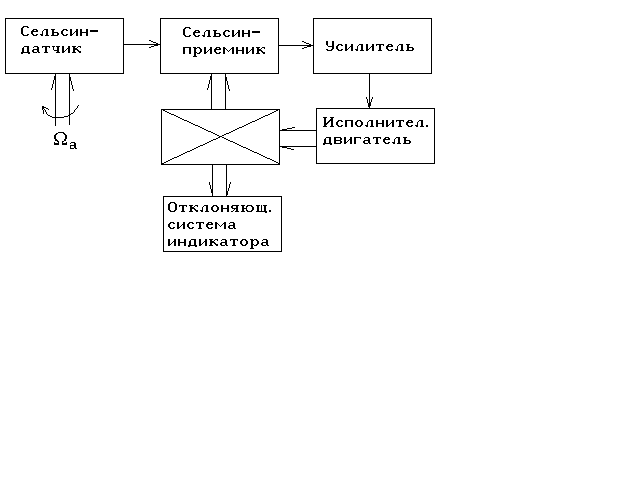
Рис.6.32. Одноканальная система передачи азимута
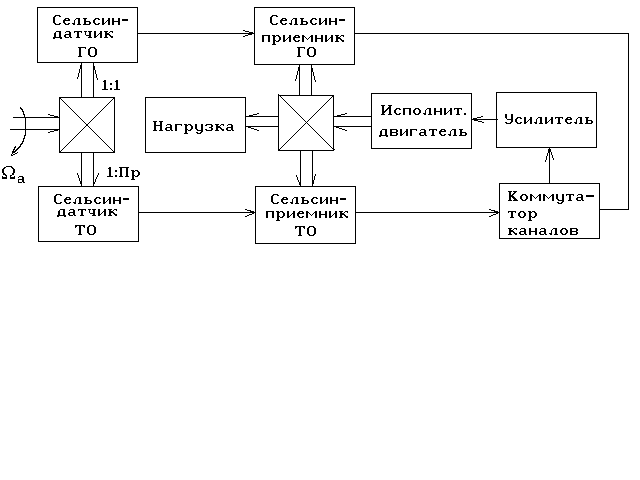
Рис.6.33. Двухканальная система передачи азимута
Коэффициент редукции обычно имеет значения np = 20-40. В двухканальных СПА с четным значением np возможно слежение с рассогласованием на 180° (т.е. с постоянной ошибкой на 180°) из-за совпадения истинного нуля точного канала с ложным нулем грубого.
Для исключения этого явления предусматриваются специальные схемы сбивки нуля с помощью дифференциального сельсина или путем подачи на сельсин-приемник дополнительного напряжения. Кроме того, для уменьшения ошибки сельсины питаются от источников с повышенной частотой (единицы килогерц).
Одним из основных требований, предъявляемых к СПА является точность передачи углового положения антенны к измерителю. Она обусловлена ошибками электромеханических устройств (сельсинов), неточностью срабатывания электронных схем и люфтами в механических редукторах, входящих в СПА.
Среднеквадратическая ошибка одноканальной СПА составляет σβ ≈ 10, а двухканальной – σβ ≈ 7-9'.
Таким образом, системы передачи азимута РЛС РТВ являются их необходимой составной частью и во многом определяют такую важнейшую характеристику РЛС, как инструментальную составляющую точности измерения угловых кооординат.