

Занятие 3
4.10 Принципы построения элементов и устройств системы сдц
4.10.1 Ограничитель
Ограничитель устанавливается между УПЧ и ФД. Применение ограничителя позволяет устранить паразитную амплитудную модуляцию сигнала, которая может возникнуть при прохождении сигнала в высокочастотном тракте приемника РЛС. Известно, что напряжение на выходе ФД UФД определяется формулой
UФД = kфд Uвх cos Δφ ,
где kфд − коэффициент передачи ФД, Uвх − амплитуда входного напряжения, Δφ − фазовый сдвиг.
Основное требования к ФД сводится к тому, чтобы напряжение на его выходе зависело только от фазового сдвига Δφ. При наличии входного напряжения ФД с паразитной амплитудной модуляцией UФД будет зависеть и от Uвх. Для устранения этого влияния применяют ограничитель амплитуды входного сигнала Uвх.
Как уже отмечалось, ограничитель обеспечивает согласование динамического диапазона УПЧ (по выходу) с динамическим диапазоном элементов системы СДЦ. Кроме того, с помощью ограничителя можно обеспечить нормировку нескомпенсированных остатков ПП до уровня собственных шумов приемника.
С этой целью уровень ограничения выбирается таким образом, чтобы нескомпенсированные остатки ПП напоминали шум приемника. Если этого не сделать, то в некоторых случаях обнаружение цели даже при достаточно мощном отраженном сигнале будет невозможным из-за засвета экрана индикатора остатками пассивных помех. Рассмотрим особенности построения ограничителей.
На рис.4.47,а представлена принципиальная схема ограничителя на последовательно включенных диодах. Сопротивление R1 должно быть значительно больше сопротивлений резисторов R2 и R3. При больших уровнях входных сигналов ограничителю этого типа присущи недостатки, обусловленные накоплением зарядов. Применение диодов на «горячих» носителях позволяет улучшить этот хороший в прочих отношениях ограничитель.
На рис.4.47,б представлен транзисторный ограничитель. Он имеет высокую фазовую стабильность. Повышение качественных характеристик подобного ограничителя можно обеспечить за счет использования нескольких последовательно включенных транзисторов, работающих в режиме ограничения.
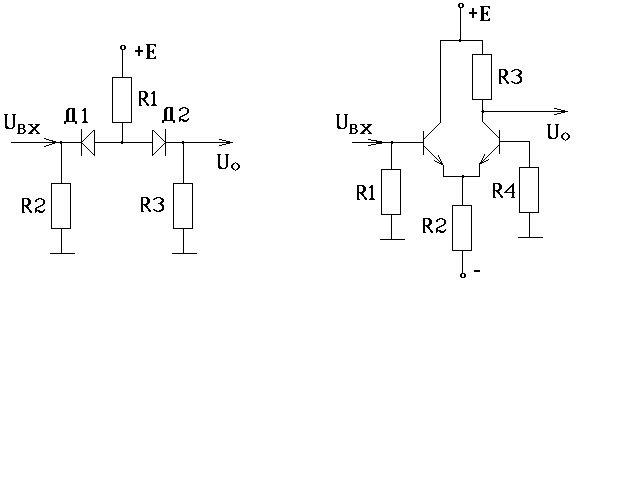
а) б)
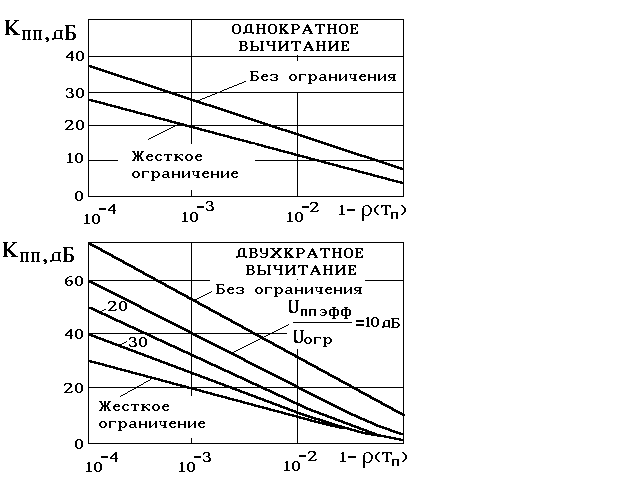
Рис.4.47. Диодный (а) и транзисторный (б) ограничитель. Влияние ограничителя на коэффициент подавления ПП: в − при однократном вычитании; г − при двухкратном вычитании
Включение ограничителя перед фазовыми детекторами исключает перегрузку элементов систем СДЦ и тем самым обеспечивает возможность работы системы СДЦ в условиях нестационарных пассивных помех.
Однако наличие ограничителя существенно сказывается на коэффициенте подавления ПП, достижимом в системах СДЦ, особенно в системах с большой кратностью вычитания. Ограничитель является нелинейным элементом, поэтому при прохождении через него сигналов ПП ширина спектра флюктуаций увеличивается.
На рис.4.47,в и рис.4.47,г показаны зависимости коэффициента подавления сигналов ПП от исходного коэффициента междупериодной корреляции этих сигналов при различных относительных уровнях ограничения для систем СДЦ с одно − и двухкратным вычитанием.
Таким образом, включение ограничителя может привести к весьма существенному снижению предельно достижимого значения коэффициента подавления ПП (на десять и более децибел при двухкратном вычитании). Однако следует помнить и о том, что при отсутствии ограничителя может оказаться, что РЛС вообще не будет обнаруживать цели в условиях помех.