

4.8 Обобщенная структурная схема системы сдц
4.8.1 Структурная схема систем сдц
Физическими основами защиты РЛС от пассивных помех являются различия в параметрах полезных и мешающих сигналов. Если такие различия существуют, то система должна отселектировать (разделить) полезные сигналы от мешающих и скомпенсировать последние.
При решении задачи селекции полезных сигналов на фоне пассивных помех в настоящее время, как отмечалось ранее, основное внимание уделяется скоростным (частотным) и углоскоростным (пространственно-временным) методам помехозащиты как наиболее эффективным.
Другие методы в этом смысле обладают меньшими возможностями и могут использоваться как дополнительные.
В РЛС с системами СДЦ, осуществляющими селекцию сигналов целей и пассивных помех (ПП) по частоте Доплера, для эффективного подавления ПП необходимо обеспечить когерентность импульсов пачки отраженных сигналов на входе устройства режекции.
При использовании в РЛС истинной внутренней когерентности, когда излучается когерентная пачка, необходимость в применении специальных устройств, обеспечивающих когерентность сигналов при приеме, отпадает.
Система СДЦ в этом случае состоит из режекторного фильтра (РФ) и устройства переноса спектра сигнала в область его рабочих частот. При других способах обеспечения когерентности в состав системы СДЦ кроме режекторного фильтра должно входить и так называемое когерентно-импульсное устройство (КИУ), которое обеспечивает когерентность импульсов в пачке и перенос их спектра в область рабочих частот РФ. Поэтому в общем случае структурная схема системы СДЦ имеет вид, представленный на рис.4.41.
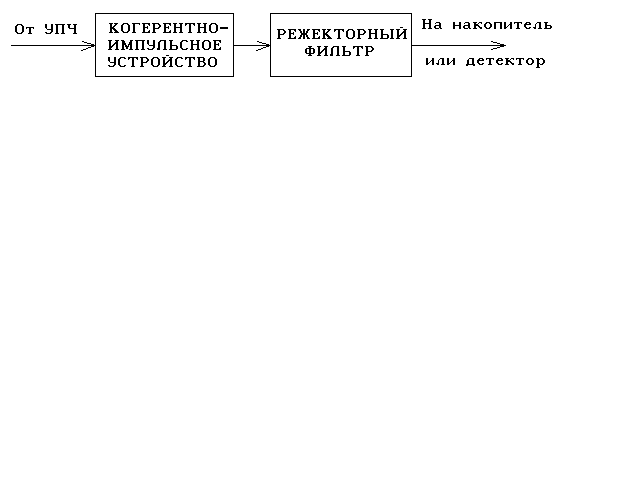
Рис.4.41. Упрощенная структурная схема системы СДЦ
Известно, что для эффективной селекции целей по скорости необходимо использовать зондирующие сигналы с высокой разрешающей способностью по этой координате. Примерами таких сигналов являются непрерывные гармонические колебания и когерентные последовательности радиоимпульсов. Так как РЛС РТВ должны определять и дальность до цели, то в них непрерывные зондирующие колебания не применяются, а используются зондирующие сигналы в виде последовательности радиоимпульсов.
Известно, что при обнаружении сигнала на фоне собственных шумов приемника и пассивных помех (не белого шума) оптимальная частотная характеристика линейной части приемника РЛС определяются выражением
![]() (4.24)
(4.24)
где c1, c2, tо – постоянные, определяемые параметрами линейной части приемника; Nпп(f) – спектральная плотность мощности пассивной помехи; g*(f) – комплексно-сопряженный спектр ожидаемого сигнала с нулевым временем запаздывания.
Наряду с необходимостью накопления сигнала, выражение (4.24) учитывает необходимость режекции спектральных составляющих пассивной помехи.
Режекторный фильтр подавляет сигналы ПП путем режекции («вырезания») их спектральных составляющих. Для достижения максимального отношения сигнал-помеха на выходе системы СДЦ АЧХ РФ должна удовлетворять условию
![]()
Практическая реализация фильтров с такой АЧХ является достаточно сложной задачей, поэтому в РЛС РТВ обычно используются квазиоптимальные РФ.
Анализ выражения (4.24) и принципов построения обнаружителей сигналов со случайной начальной фазой позволяет определить набор функциональных элементов и устройств, необходимых для реализации варианта построения системы СДЦ. Например, для систем СДЦ на видеочастоте в состав системы должны входить устройства:
переноса спектров входных сигналов линейной части приемника в область видеочастот (фазовые детекторы);
формирования опорного напряжения для фазовых детекторов;
череспериодной компенсации (режекторный фильтр).
Кроме перечисленных устройств в состав системы может входить устройство согласования динамических диапазонов фазовых детекторов (по входу) с динамическим диапазоном УПЧ (по выходу). В качестве подобного устройства часто используется обычный ограничитель сигналов.
В качестве примера на рис.4.42 представлена обобщенная структурная схема системы СДЦ для РЛС, в которой осуществляется некогерентное накопление отраженных сигналов. Наличие двух квадратурных каналов исключает возможность потери полезного сигнала за счет незнания его начальной фазы. Двухполупериодные выпрямители обеспечивают преобразование биполярных сигналов с выходов устройств ЧПК в однополярные перед их суммированием и подачей на накопитель.
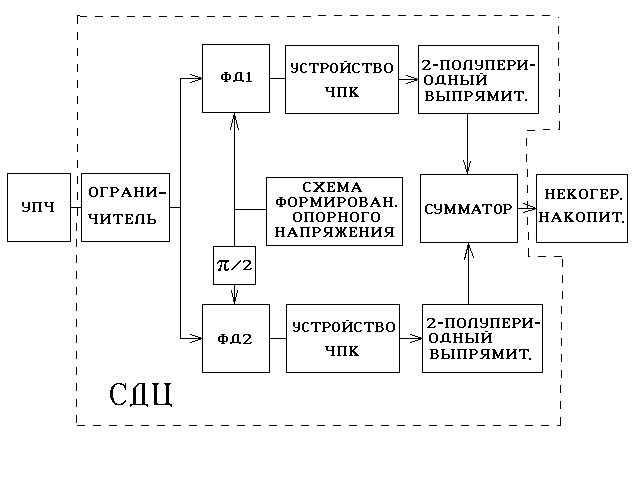
Рис.4.42. Обобщенная структурная схема системы СДЦ на видеочастоте