

4.12.2 Корреляционно-фильтровые системы сдц
Потенциальные возможности корреляционно-фильтровых систем СДЦ (рис.4.74) по подавлению ПП такие же, как и у фильтровых. Отличие их состоит лишь в особенностях технической реализации. В такой системе осуществляется стробирование выходных сигналов УПЧ по времени запаздывания (дальности).
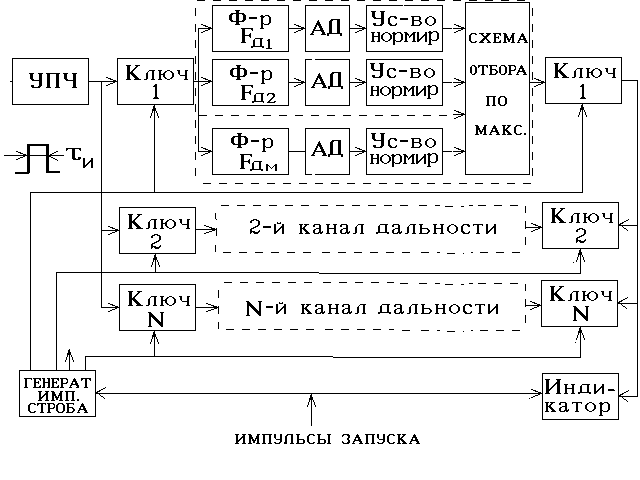
Рис.4.74. Структурная схема корреляционно-фильтровой системы СДЦ
Относительный временной сдвиг стробирующих импульсов в смежных каналах дальности примерно равен (но не больше) τи(в) ≈ 1/Пи.
Число дальностных каналов зависит от диапазона дальностей R, в котором работает СДЦ, и составляет 2.R/с.τи(в). Выбор канала дистанции обеспечивается задержкой стробирующих импульсов относительно импульса запуска РЛС. В каждом канале дальности имеется М узкополосных доплеровских фильтров с полосой пропускания и разносом по частоте, равным Fп/M. Общее количество узкополосных фильтров в системе равно М∙2∙R/c∙τи(в), причем число различающихся типов всего лишь М. Это является большим преимуществом корреляционно-фильтровой системы СДЦ перед фильтровой.
Устройства нормировки выполняют ту же роль, что и в фильтровой системе СДЦ, их коэффициенты передачи должны устанавливаться с учетом оценки мощности сигналов ПП на выходе одноименных доплеровских фильтров нескольких каналов дальности.
Качественный вид результирующей АЧХ режекторного фильтра и набора узкополосных (доплеровских) фильтров в канале дальности изображен на рис.4.75.
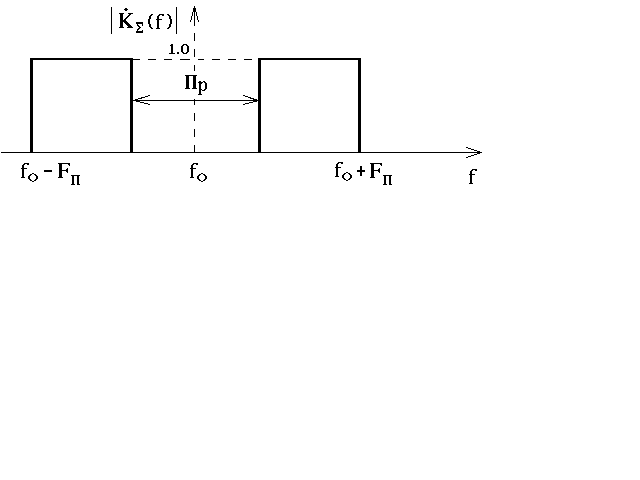
Рис.4.75. АЧХ одного канала дальности корреляционно-фильтровой системы СДЦ
Если форма АЧХ доплеровских фильтров отличается от прямоугольной, а РЛС работает в условиях интенсивных отражений от местных предметов, то в каждый канал дальности дополнительно включается фильтр, обеспечивающий режекцию сигналов с нулевыми доплеровским смещением частоты.
После детектирования сигналы с выходов доплеровских каналов отбираются по максимуму и, таким образом, номер доплеровского канала, на выходе которого сигнал максимален, несет информацию о радиальной скорости цели. Однако в этом сигнале информации о дальности цели отсутствует.
Для получения возможности измерить дальность используется восстановитель дистанции, на который подается тот же стробирующий импульс, что и на селектор дальности. Другими словами, выходные ключи, которые управляются теми же стробирующими импульсами, что и входные, выполняют роль восстановителей дистанции и обеспечивают возможность измерения дальности.
Корреляционно-фильтровая система СДЦ может быть реализована и на видеочастоте (рис.4.76).
Потенциальные возможности фильтровых и корреляционно-фильтровых систем с точки зрения подавления ПП практически одинаковые.
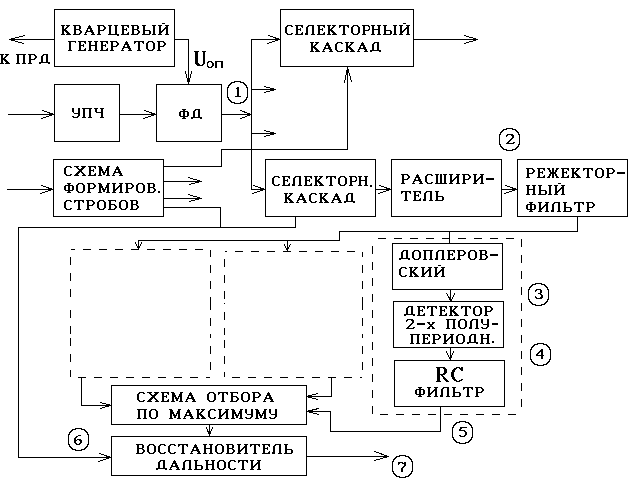
Рис.4.76. Корреляционно-фильтровая система СДЦ на видеочастоте.
Отличие их состоит лишь в особенностях технической реализации. Если в фильтровых системах СДЦ все N = M∙Q фильтров настроены на разные частоты (разнотипны), то в корреляционно-фильтровых используются только М типов фильтров. Кроме того, корреляционно-фильтровую систему можно использовать для перекрытия только небольшого участка дальности. Выбор участка при этом осуществляется путем изменения задержки последовательности стробирующих импульсов относительно импульса запуска. Количество каналов дальности (а следовательно, и фильтров) при этом уменьшается в R/ΔR раз (здесь ΔR − диапазон дальностей, в котором работает система СДЦ). Эти обстоятельства и обуславливают практическое преимущество корреляционно-фильтровых систем СДЦ перед фильтровыми.
Из-за временного и частотного стробирования в корреляционно-фильтровых системах СДЦ имеют место потери энергии сигнала порядка 2,5 дБ. В фильтровых системах СДЦ они вдвое меньше, т.к. в них отсутствует временное стробирование.