

4.9 Устройства селекции движущихся целей
4.9.1 Устройства сдц с эквивалентной внутренней когерентностью с чпв на видеочастоте
Структурная схема устройства СДЦ с эквивалентной внутренней когерентностью с ЧПВ на видеочастоте представлена на рис.4.44.
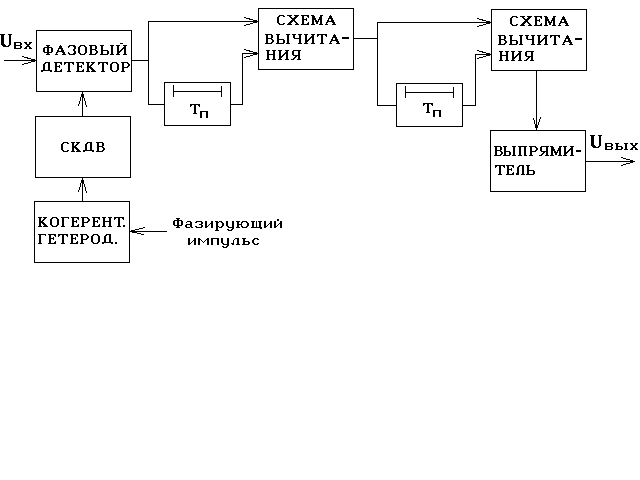
Рис.4.44. Структурная схема устройства СДЦ с эквивалентной внутренней когерентностью с ЧПВ на видеочастоте
В этой схеме на фазовый детектор (ФД) подается напряжение с выхода УПЧ приемного устройства РЛС и опорное напряжение, которое формируется когерентным гетеродином. Частота когерентного гетеродина в устройствах СДЦ с череспериодным вычитанием (ЧПВ) на видеочастоте равна частоте сигнала, т.е. промежуточной частоте приемного устройства.
Амплитуда и полярность выходных сигналов ФД определяется амплитудой входных сигналов и разностью фаз сигнала (помехи) и опорного когерентного напряжения. Если начальная фаза сигнала (помехи) остается неизменной от периода к периоду ΏД = 0 (частота Доплера равна нулю), то последовательность импульсов на выходе ФД будет иметь постоянную амплитуду. Если же сигнал (помеха) имеет регулярное межпериодное изменение фазы Δφ = ΏДTП, то последовательность импульсов на выходе ФД будет промодулирована частотой пульсаций Fпульс = FД − kFП, где k − [FД/FП] − целая часть отношения.
Если последовательность импульсов подать на входы схемы вычитания: на один вход непосредственно, а на другой – через линию задержки на период следования, то помеха текущего периода следования будет скомпенсирована задержанной помехой предыдущего периода следования.
Вследствие модуляции полезных сигналов частотой пульсаций, полезные сигналы в схеме вычитания не компенсируются (за исключением случаев полета воздушных объектов со «слепой» скоростью, когда межпериодное изменение фазы сигнала Δφ = ΏДTП составит величину кратную 2π).
Реально помеха не абсолютно коррелирована, т.е. амплитуда и фаза медленно флюктуируют от периода к периоду следования. В результате амплитуда импульсов на выходе ФД также флюктуирует и в схеме вычитания помеха компенсируется не полностью. Для уменьшения уровня нескомпенсированных остатков помехи после первой ступени ЧПВ включают вторую, третью и т.д. На выходе схемы вычитания, как и на выходе ФД, сигналы могут иметь разную полярность, поэтому на выходе системы СДЦ устанавливают выпрямитель.
Рассмотрим принцип подавления пассивной помехи в устройстве СДЦ со спектральной точки зрения.
При фазовом детектировании происходит смещение спектров помехи и сигнала на видеочастоту, причем структура их спектров оказывается различной. Спектр помехи Nпп(f), у которой FДП = 0, имеет вид последовательности одиночных гребней, занимающих на оси частот положения, кратные частоте следования (рис.4.45,а). Гребни же спектра полезного сигнала gC(f), если его частота Доплера не кратна частоте следования FДП = kFП, при фазовом детектировании расщепляются на два гребня, смещенные в разные стороны относительно значении kFП на величину FПC (рис.4.45,б).
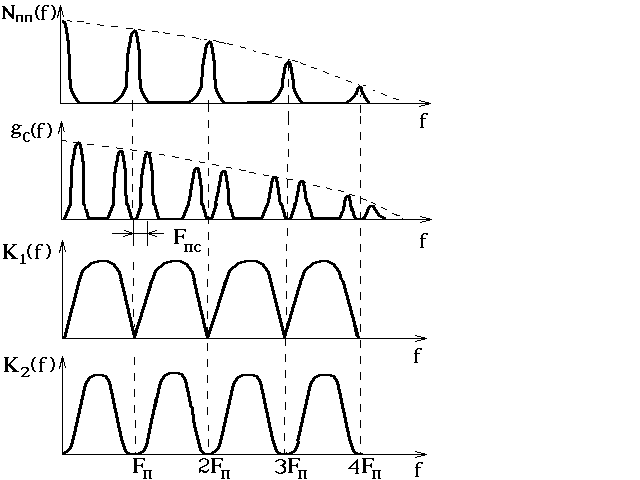
Рис.4.45. Спектры пассивных помех (а), полезных сигналов (б) и АЧХ устройств СДЦ при однократном (в) и двухкратным ЧПВ (г)
На рис.4.45,в и рис.4.45,г изображены АЧХ устройств СДЦ с однократным |К1(f)| = 2|sin(πfTП)| и двухкратным |К2(f)| = 4sin2(πfTП) череспериодным вычитанием соответственно.
Как следует из сопоставления рисунков, показанных на рис.4.5, наиболее интенсивные составляющие спектра помехи попадают в полосы режекции частотных характеристик устройств СДЦ, в результате чего происходит ослабление помехи. Подавление полезного сигнала не происходит, так как его спектральные составляющие вне полосы режекции.
Если облако дипольных отражателей движется под действием ветра, то пассивная помеха будет иметь регулярное межпериодное изменение фазы. Последовательность импульсов помехи на выходе ФД окажется промодулированной частотой FДП (Fпульс), а спектр помехи будет иметь такую же структуру как и спектр полезного сигнала. Подавление такой помехи в схеме ЧПВ происходить не будет. Поэтому принимаются меры для «остановки» пассивной помехи, например, путем введения в когерентное напряжение регулярное межпериодное изменение фазы, равное изменению фазы помехи. Разность фаз помехи и когерентного напряжения при этом от периода к периоду остается неизменной, а последовательность импульсов и спектр помехи на выходе ФД становятся такими, как для неподвижной помехи.
При обзоре пространства схему компенсации действия ветра (СКДВ) необходимо непрерывно перестраивать, что является существенным недостатком устройств СДЦ с внутренней когерентностью. Погрешность настройки приводит к значительному снижению коэффициента подпомеховой видимости. Это ограничивает широкое применение таких устройств СДЦ.