

5.3 Принципы построения цифровых обнаружителей радиолокационных сигналов
Еще с середины 40-х годов специалисты по радиоэлектронике начали задумываться над возможностью применения специализированных ЭВМ для решения разнообразных задач, связанных с обработкой сигналов. Однако долгое время достигнутый уровень развития цифровой техники позволял получить практические результаты только в задачах обработки низкочастотных сигналов.
В настоящее время сфера применения цифровой обработки сигналов непрерывно расширяется в связи с тем, что при помощи специализированных устройств на интегральных схемах или универсальных вычислительных устройств можно получить новые результаты, недостижимые при использовании аналоговых методов. Широкому внедрению цифровых методов обработки информации способствуют следующие факторы: микроминиатюризация; повышение надежности и стандартизация производства цифровых элементов; возможность использования одних и тех же цифровых элементов при смене условий, режимов работы и зондирующих сигналов РЛС; неограниченная длительность хранения оцифрованной информации при оперативном доступе к ней; широкие возможности повышения разрядности арифметических устройств, АЦП, приводящие к повышению точности и расширению динамического диапазона обработки.
Применение в РЛС РТВ автоматической цифровой обработки радиолокационной информации было обусловлено необходимостью повышения их информационных возможностей в условиях всё более усложняющейся воздушной обстановки. Вспомним, что при визуальном съёме темп выдачи информации ограничен возможностями оператора, который может выдавать данные не более чем о 6-8 воздушных объектах, причём с невысокой точностью.
Сложность и многообразие задач, решаемых аппаратурой автоматической цифровой обработки информации, сложность конструктивного исполнения составных элементов делает актуальным ее изучение.
5.3.1 Цифровые обнаружители радиолокационных сигналов при бинарном квантовании
Алгоритм оптимального обнаружения пачки бинарно-квантованных сигналов представляется в виде
![]() (5.3)
(5.3)
где xi – значение сигнала (0 или 1) на i-ой позиции пачки; ni – весовой коэффициент, зависящий от значений вероятностей получения нулей и единиц на i-ой позиции пачки; М – число импульсов в пачке (число позиций).
Последовательность коэффициентов ni называют весовой функцией обнаружения.
Из формулы (5.3) видно, что обнаружение пачки сводится к суммированию значений весовой функции на тех позициях, где xi = 1, и сравнению результата суммирования с порогом С, при превышении которого выдается решение об обнаружении. В связи с этим устройство, реализующее алгоритм (5.3), называют весовым бинарным обнаружителем.
При бинарном квантовании весовая функция обнаружения в интервале, соответствующем ширине диаграммы направленности РЛС будет тождественно равна единице, накопление в этом интервале становится равновесным, а алгоритм (5.3) сводится к счету единиц и сравнению результата с цифровым порогом. Из-за отсутствия весового суммирования возникают дополнительные потери порядка 1,5 дБ, однако техническая реализация алгоритма обнаружения значительно упрощается.
Следует отметить, что в РЛС указанную процедуру необходимо осуществлять в каждом дальномерном канале. Такой канал называют обнаружителем движущегося окна, поскольку обработка осуществляется синхронно с перемещением луча по азимуту, а размер движущегося окна соответствует ширине диаграммы направленности антенны в азимутальной плоскости.
Обнаружитель может быть реализован на базе счетчиков (рис. 5.9). Одноразрядный АЦП (квантизатор) осуществляет дискретизацию и квантование выходных сигналов амплитудного детектора. Последовательность нулей и единиц через ключ соответствующего канала дальности поступает на сдвигающий регистр и суммирующий вход реверсивного счетчика. Число разрядов сдвигающего регистра выбирается равным числу импульсов в пачке. С каждым очередным зондированием осуществляется сдвиг содержимого регистра на один разряд вправо. При этом из последнего разряда регистра выталкивается 0 или 1. Поступая на вычитающий вход реверсивного счетчика, они соответственно либо не изменяют его состояние, либо уменьшают значение имеющегося в счетчике числа на единицу. Число, записанное в счетчике, сравнивается далее с цифровым порогом (с числом к), и в зависимости от результата сравнения на выходе обнаружителя появляется единица или нуль.
Если вероятности обнаружения и ложной тревоги на всех позициях пачки принять одинаковыми и равными соответственно Робн1 и Рлт1, то вероятности правильного обнаружения и ложной тревоги в обнаружителе движущегося окна при известном угловом положении цели определяются по формулам:
![]() (5.4)
(5.4)
![]() (5.5)
(5.5)
где CjM = M!/[j!(M – j)!] – число сочетаний из М по j.
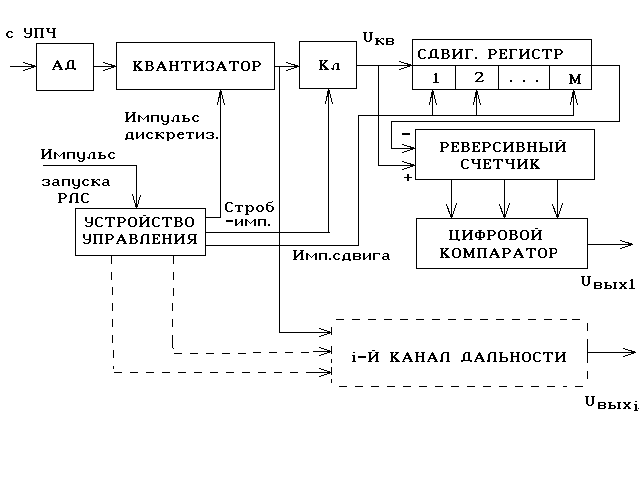
Рис.5.9. Обнаружитель типа движущего окна
Формулы (5.4), (5.5) позволяют оценивать эффективность цифрового накопителя, а также определять требуемый порог квантования, обеспечивающий заданную вероятность ложной тревоги. При заданных k, М и Рлт из соотношения (5.5) определяется Рлт1, а значение порога квантования рассчитывается по формуле
Uпор = [2lg(1/Pлт1)]1/2σш
Для каждого М существует оптимальное значение kопт ≈ 1,5√М, при котором потери минимальны. Потери при накоплении бинарноквантованных сигналов по сравнению с аналоговым некогерентным накоплением невелики (рис.5.10) и составляют порядка 2 дБ.
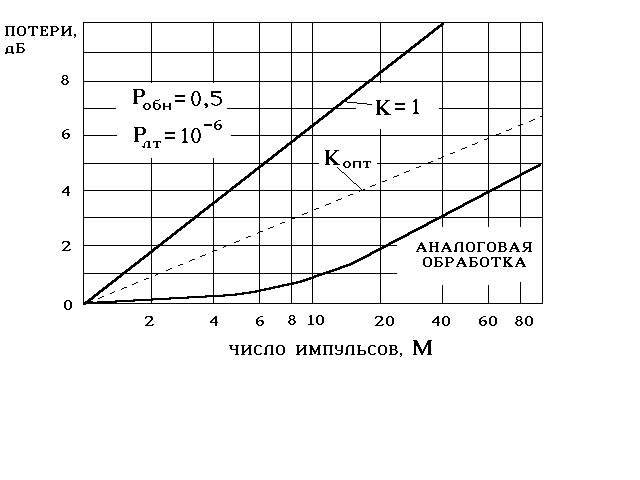
Рис.5.10. Зависимость потерь при цифровом накоплении от числа импульсов в пачке
Таким образом, в РЛС указанную процедуру обработки необходимо осуществлять в каждом дальномерном канале. Такой канал называют обнаружителем движущегося окна, поскольку в нем обработка осуществляется синхронно с перемещением луча по азимуту, а размер движущегося окна соответствует ширине диаграммы направленности антенны в азимутальной плоскости.
Логический обнаружитель k из М. Обнаружитель, который по своей эффективности эквивалентен обнаружителю движущегося окна, может быть выполнен на основе логических схем (рис.5.11). Принцип его действия основан на том, что решение об обнаружении или необнаружении пачки принимается на основе анализа содержимого регистра логической схемой. Число разрядов регистра равно числу импульсов в пачке – М, т. е. анализу подвергается последовательность нулей и единиц в пределах ширины диаграммы направленности антенны РЛС.
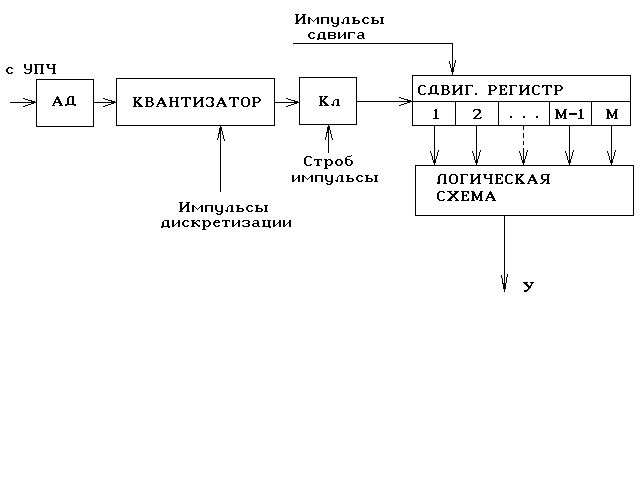
Рис.5.11. Логический обнаружитель k из М
Конкретный вид логической схемы может быть синтезирован методами булевой алгебры с учетом обеспечения заданных вероятностей правильного обнаружения Робн и ложной тревоги Рлт. Последние зависят от того, по какому количеству комбинаций нулей и единиц в регистре (из общего количества, равного 2М) примается решение об обнаружении пачки. Очевидно, чем больше таких комбинаций, тем больше вероятность правильного обнаружения, но больше и вероятность ложной тревоги.
Логические обнаружители с фиксацией границ пачки (обнаружители типа (l/n – k). Число импульсов в пачке не является постоянным и зависит от дальности, ЭПР цели, угла места цели и т.д. Это затрудняет применение оптимальных обнаружителей, которые критичны к числу импульсов в пачке. Кроме того, при большом числе импульсов в пачке реализиция оптимальных алгоритмов связана с большими аппаратурными затратами. В связи с этим на практике находят применение упрощенные методы обработки, основанные на использовании информации об увеличении плотности единиц в области наличия полезного сигнала по сравнению с областью одного шума. Обнаружители, реализующие эти методы, фиксируют только начало и конец пачки, независимо от числа импульсов в пачке М.
Начало пачки фиксируется по определенному количеству единиц l на n позициях пачки, т.е. по критерию l из n, причем n, как правило, значительно меньше М. Критерий фиксации начала пачки является одновременно и критерием обнаружения.
Наибольшее распространение получили следующие критерии (логики обнаружения): 2 из 3, 3 из 3, 3 из 4. Конец пачки фиксируется по наличию серии из k пропусков (нулей) подряд. В связи с этим критерий срабатывания обнаружителя записывается в виде l/n – k.
Структурная схема обнаружителя такая же, как и на рис.5.11. Отличие состоит в том, что число разрядов регистра n < М, а логическая схема имеет два выхода: фиксации начала yн и конца yк пачки.
Так для логики обнаружения 2/3-2:
yн = х1 х2 V х1 х3 = х1 (х2 V х3);
![]()
где хi − значение сигнала (0 или 1) на i-й позиции пачки, i = 0, 1, 2. Вероятность правильного обнаружения зависит от отношения сигнал-шум и логики обнаружения (рис.5.12). Часто отдают предпочтение жестким логикам, поскольку техническая реализация их значительно проще. Так, например, для логики «3/3» устройство фиксации начала пачки представляет собой одну трехвходовую схему совпадения.
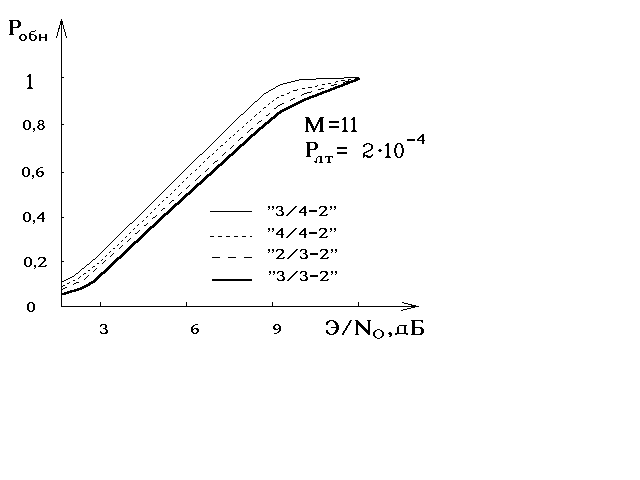
Рис.5.12. Зависимость вероятности правильного обнаружения от отношения сигнал/шум для различных логик обнаружения
Стабилизация вероятности ложной тревоги. Из-за нестабильностей порога квантования и коэффициентов усиления элементов приемного тракта, предшествующих цифровому обнаружителю, может существенно возрасти поток ложных тревог. Поэтому при цифровом обнаружении принципиально необходимо осуществлять стабилизацию вероятности ложной тревоги. В качестве схем стабилизации можно использовать ШАРУ (в УПЧ) или модифицированный знаковый обнаружитель.
Таким образом, поскольку число импульсов в пачке не является постоянным и зависит от дальности, ЭПР цели, угла места цели и т.д., то это затрудняет применение оптимальных обнаружителей, которые критичны к числу импульсов в пачке. По этой причине на практике находят применение упрощенные методы обработки, основанные на использовании информации об увеличении плотности единиц в области наличия полезного сигнала по сравнению с областью одного шума. Обнаружители, реализующие эти методы, фиксируют только начало и конец пачки, независимо от числа импульсов в пачке М.